

1 2 3 5 4 1 Перемещения узлов и узловые нагрузки Узел
![]()
![]()
З а м е ч а н и я:
1. При использовании матрицы K внутренней жёсткости ОСМП, формируемой автоматически по программе METDEF ( для этого даётся соответствующая директива при вводе исходных дан-ных в компьютер ), матрица S0 концевых усилий в единичных со-
стояниях
не
требуется;
в
этом
случае
эпюры
![]() (
см.
рис.
3.28
)
(
см.
рис.
3.28
)
можно не строить. Дополнительно описываются длины элементов
l1 = l2 = l3 = 6 м ; l4 = l5 = 4 м ; их типы – 2, 2, 2, 1, 2 ; относительные погонные жёсткости j = ij / i0 ( j = 1, …, 5 ): 1 = 2 =3 = 2, 4 =5 = 1;
порядки матриц aj элементов: 3, 3, 3, 4, 3.
2. Можно использовать приём замены нагрузок F, q, p(1) и p(2) эквивалентными расчётными узловыми, тогда матрица SF обнуля-ется, а матрицы с и Fu формируются для двух узлов:
Перемещения
узлов
и
узловые
нагрузки
Узлы
1
2




![]()
![]()

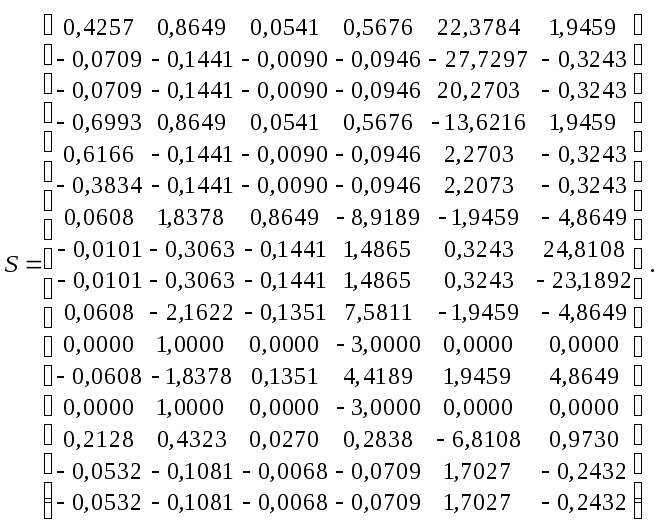
Результаты расчёта по программе METDEF :
о
 усилия
в концевых сечениях элементов рамы (
по
вариантам загружений
)
усилия
в концевых сечениях элементов рамы (
по
вариантам загружений
)
С помощью первых трёх столбцов матрицы S строятся эпю-ры единичных моментов М1, М2, М3 ( см. рис. 3.4 ), из остальных берутся значения МF , Мр(1) и Мр(2) ( cм. рис. 3.10 и 3.17 ). Как уже
отмечалось ранее ( см. с. 159 ), моменты МG от весов масс нахо-дятся через М1 .
Обратим внимание на то, что при выполнении расчёта по методу перемещений имеется возможность использовать для отыскания коэффициентов и свободных членов динами-ческих уравнений ( компонентов матриц и F ) не только вы- численные моменты М1, М2, М3 и МF , но и найденные значе-ния основных неизвестных Z – в случае, когда массы распо-лагаются в расчётных узлах ОСМП.
В рассматриваемой задаче перемещения y2 и y3 двух верх-них масс ( см. рис. 3.3 ) на рис. 3.27 обозначены как Z3 и Z1 соот-ветственно, т.е. y2 = Z3 , y3 = Z1*). Поэтому из первых трёх столб-цов матрицы Z можно найти большинство единичных перемеще-ний ik , а из четвёртого – перемещения 2F и 3F от амплитуд динамических нагрузок:

Z1
Z3
в




























 ыражаемые
непосредственно
через Z
ыражаемые
непосредственно
через Z
в
Z2
Z5
в


 п. 3.1.1.3
–
«перемножением»
эпюр
по
п. 3.1.1.3
–
«перемножением»
эпюр
по
м



 етоду
Максвелла
–
Мора.
етоду
Максвелла
–
Мора.
Z4

 Если
при
выборе ОСМП
в число
Если
при
выборе ОСМП
в число
р

 асчётных
узлов
включить
точки распо-
асчётных
узлов
включить
точки распо-
ложения сосредоточенных масс (как, на-
пример, на рис. 3.31 для рассматривае- Рис. 3.31
* )
В случае противоположно направленных
yi
и Zk
было бы
yi
=
–
Zk
.
)
В случае противоположно направленных
yi
и Zk
было бы
yi
=
–
Zk
.
мой рамы, где появляются два дополнительных неизвестных Z4 и Z5 и на единицу увеличивается количество элементов ОСМП ), то по результатам расчёта методом перемещений могут быть полностью сформированы матрицы упругой податливости и амплитудных перемещений F . Несложно увидеть, что ОСМП по рис. 3.31 с точностью до нумерации основных неизвестных Z сов-падает с системой, показанной на рис. 3.16 в варианте расчёта, изложенном в п. 3.1.1.4.