

Принципи вимірювання координат, реалізовані в рлс ртв
Процес отримання радіолокаційної інформації, як відомо, складається з наступних основних і дуже важливих етапів:
виявлення цілей; вимірювання координат і параметрів руху; дозвіл цілей; пізнання і розпізнавання цілей.
Режими зчитування інформації: візуальний і автоматичний.
При візуальному способі зчитування інформації вимірювання координат здійснюється оператором візуально по індикатору шляхом інтерполяції позначок від цілей між мітками дальності та азимута. При цьому візуально визначаються лише дві координати: азимут і дальність.
При автоматичному способі зчитування інформації вимірювання координат здійснюється системою автоматичного визначення координат. При цьому визначаються повні просторові координати цілей: дальність rц, азимут ц, кут місця ц і висота hц.
Принцип вимірювання дальності
Імпульсний метод. Дальність rц до цілі визначається по величині часу запізнювання луна-сигналу від цілі відносно моменту випромінювання зондуючого сигналу:
![]() , (1.1)
, (1.1)
де с=3108 м/с – швидкість поширення електромагнітних хвиль; з – час запізнювання луна-сигналів.

Рис.2.6. Спрощена структурна схема РЛС
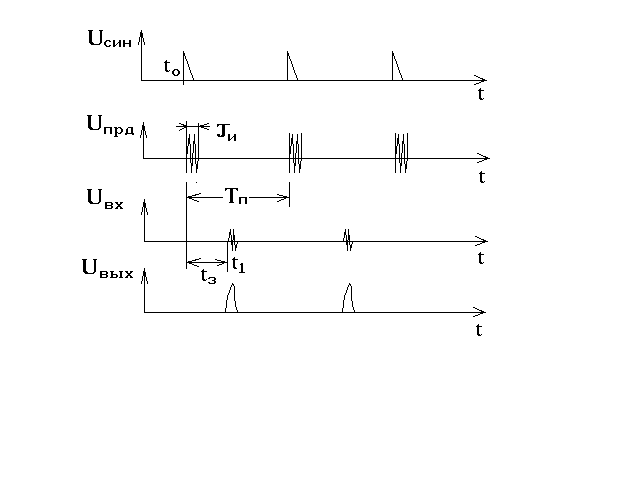
Рис.2.7. Епюри, пояснюючі принцип вимірювання дальності
Частотний метод вимірювання дальності заснований на використовуванні частотної модуляції випромінюваних безперервних коливань. Час запізнювання визначається шляхом вимірювання різниці частот випромінюючих коливань і відображеного сигналу.
Фазові методи вимірювання дальності засновані на вимірюванні різниці фаз випромінюючих синусоїдальних коливань і прийнятих радіосигналів. При використовуванні цього методу основною трудністю є подолання неоднозначності відліку фази, оскільки фазометричний пристрій дозволяє визначати фазові зрушення тільки в межах від 0 до 2π. Тому Dодн < l/2.
Принцип вимірювання азимута
Для вимірювання азимута в більшості РЛС РТВ застосовується амплітудна пеленгація шляхом аналізу огинаючої пачкового сигналу на максимум.
Амплітудна пеленгація в радіолокації базується на використовуванні високонаправлених антен, що забезпечують високу роздільну здатність по кутових координатах (азимуту) і необхідну дальність дії.

Рис.2.10. Огинаюча пачки імпульсів на виході лінійного приймача.
На рис.2.10 показана огинаюча пачки імпульсів на виході лінійного приймача, одержана при обертанні антени з кутовою частотою як функція азимута = ·t.
Метод порівняння характеризується тим, що пеленг цілі визначається по співвідношенню амплітуд сигналів, прийнятих одночасно двома антенами. Цей метод використовується в наземних запитувачах (метод «фазового забарвлення») радіолокації і дозволяє визначити азимут цілі з достатньо високою точністю навіть при відносно слабкій спрямованості антен. Метод «фазового забарвлення» буде детально розглянутий в подальшому. Окремим випадком методу порівняння є рівносигнальний (моноімпульсний) метод пеленгації.
Фазовий метод заснований на вимірюванні різниці фаз електромагнітних коливань, що приймаються різними антенами. Цей метод також використовується в НРЗ і буде детально розглянутий в подальшому. Метод характеризується відносно високою точністю вимірювання, а істотними його недоліками є неоднозначність відліку і відсутність дозволу цілей.
Азимут цілі в 19Ж6 визначається по центру пачки луна-сигналів з урахуванням поправок на критерій виявлення пачки (рис. 1.4, б). Критерій k/n виявлення пачки установлюється в апаратурі автоматично залежно від режиму роботи РЛС. При виконанні критерію k/n апаратура фіксує поточне значення азимута антени як азимут початку пачки п, а в момент припинення виконання критерію фіксується поточне значення азимута антени як азимут кінця пачки к. За отриманими значеннями розраховується спочатку ширина пачки по азимуту як різниця між к і п :
= к – п. (1.2)
Після цього розраховується азимут цілі з урахуванням поправки на критерійну обробку пачки:
![]() , (1.3)
, (1.3)
де п, к – поправки на виявлення початку та кінця пачки при її критерійній обробці.