

4.3. Потенциальная энергия
Е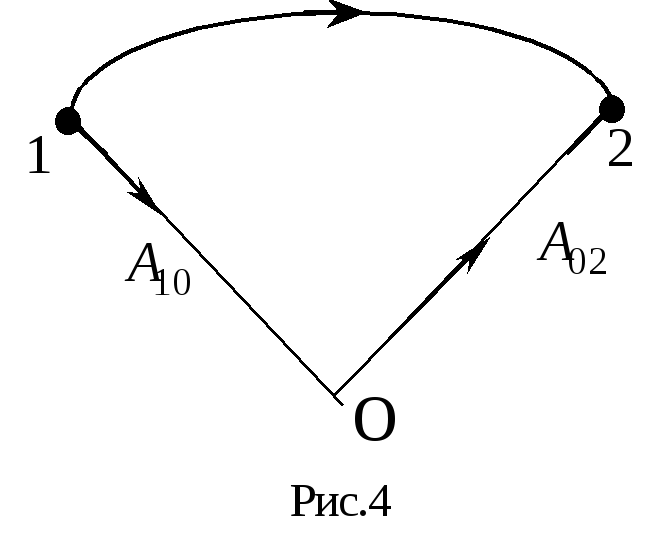 сли
на материальную точку действует
консервативная сила, то можно ввести
скалярную функцию координат точки
сли
на материальную точку действует
консервативная сила, то можно ввести
скалярную функцию координат точки
![]() ,
называемую
потенциальной энергией.
,
называемую
потенциальной энергией.
Потенциальную энергию определим следующим образом
![]() ,
(6)
,
(6)
где
С
– произвольная постоянная, а
![]() –
работа консервативной силы при перемещении
материальной точки из положения
–
работа консервативной силы при перемещении
материальной точки из положения
![]() в
фиксированное
положение
в
фиксированное
положение
![]() .
Образуем
разность значений потенциальной энергии
для точек 1 и 2 (см. рис. 4) и воспользуемся
тем, что
.
Образуем
разность значений потенциальной энергии
для точек 1 и 2 (см. рис. 4) и воспользуемся
тем, что
![]()
![]() .
.
Правая часть, полученного соотношения,
дает работу, совершаемую на пути из
точки 1 1 
![]()
![]()
О
![]() .
(7)
.
(7)
С
Рис.
3
Потенциальная энергия определяется с точностью до постоянной. Однако, это не имеет существенного значения, поскольку во все физические соотношения входит либо разность значений потенциальной энергии, либо ее производная по координатам.
4.4. Потенциальная энергия системы материальных точек
Рассмотрим систему, состоящую из многих
материальных точек. Если задано положение
каждой материальной точки, то этим
определено и положение всей системы
или ее конфигурация. Если силы, действующие
на материальные точки системы, зависят
только от конфигурации системы (т.е.
только от координат материальных точек)
и сумма работ этих сил при перемещении
системы из одного положения в другое
не зависит от пути перехода, а определяется
только начальной и конечной конфигурациями
системы, то такие силы называются
консервативными. В этом случае для
системы материальных точек также можно
ввести понятие потенциальной энергии
системы, обладающей свойством (7):
![]() , (8)
, (8)
где
![]() -
полная работа консервативных сил,
действующих на материальные точки
системы при переходе ее из конфигурации
1 в конфигурацию 2;
-
полная работа консервативных сил,
действующих на материальные точки
системы при переходе ее из конфигурации
1 в конфигурацию 2;
![]() и
и
![]() - значения
потенциальной
энергии системы в этих конфигурациях.
- значения
потенциальной
энергии системы в этих конфигурациях.
Связь между силой, действующей на тело в данной точке поля, и его потенциальной энергией определяется по следующим формулам:
![]() (9)
(9)
или ![]() , (10)
, (10)
где
![]() –
называется градиентом скалярной функции
–
называется градиентом скалярной функции
![]() ;
;
![]() – единичные векторы координатных осей;
– единичные векторы координатных осей;
![]() . (11)
. (11)
Часто
формулу (9) записывают также в виде
![]() ,
где
,
где
![]() – оператор набла, определяемый по
формуле (11).
– оператор набла, определяемый по
формуле (11).
4.5. П Р И М Е Р Ы
4.5.1. Потенциальная энергия растянутой пружины
Обозначим через х растяжение пружины, т.е. разность длин пружины в деформированном и недеформированном состояниях.
При
возвращении пружины из деформированного
состояния в недеформированное сила
![]() совершает работу.
совершает работу.
![]() . (12)
. (12)
Таким образом, потенциальная энергия упруго деформированной пружины
![]() . (13)
. (13)
4.5.2. Потенциальная энергия гравитационного притяжения двух материальных точек
На
рис. 5 изображены две материальные точки
массы m1
и m2.
Положение их характеризуется
радиусами-векторами
![]() и
и
![]() соответственно. Элементарная работа,
совершаемая силами гравитационного
притяжения этих точек
соответственно. Элементарная работа,
совершаемая силами гравитационного
притяжения этих точек
![]() ,
где
,
где
![]() – сила, действующая на первую материальную
точку со стороны второй, а
– сила, действующая на первую материальную
точку со стороны второй, а
![]() –
сила, действующая на вторую м
–
сила, действующая на вторую м атериальную
точку со стороны первой; согласно 3-му
закону Ньютона
атериальную
точку со стороны первой; согласно 3-му
закону Ньютона
![]() =-
=-![]() ;
;
![]() и
и
![]() – элементарные перемещения материальных
точек. С учетом этого
– элементарные перемещения материальных
точек. С учетом этого
![]() ,
где
,
где
![]() .
Учитывая, что
.
Учитывая, что
![]() и
и
![]() противоположно направлены и что величина
противоположно направлены и что величина
![]() ,
находим
,
находим
![]() .
Полная работа
.
Полная работа
![]() , (14)
, (14)
где R1 и R2 – начальное и конечное расстояние между материальными точками.
Эта работа равна изменению потенциальной энергии A=Wn1 -Wn2. Учитывая (14), находим, что потенциальная энергия гравитационного притяжения двух материальных точек
![]() или
или
![]() (15)
(15)
где R или r – расстояние между материальными точками.