

4 Синтез интегральной передаточной функции срп
Рассмотрим воздействие на систему падающей плоской электромагнитной волны.
Исходные данные:
![]()
![]()
-c ≤x≤ c, -b ≤y≤ b, t≥0, a≥0
![]()
![]()
![]() ,
,
где
![]() ,
,
K0 – функция Бесселя нулевого порядка.
Примем
![]()
![]() -
координаты точки, в которой необходимо
отыскать выходную величину Q
как функцию отклика на возмущение
-
координаты точки, в которой необходимо
отыскать выходную величину Q
как функцию отклика на возмущение
Q – выходная величина, соответствующая изменению заряда на пластине (электрическому току).
Считаем , что в начальный момент времени заряда на конденсаторе не было:
![]()
Т. о., выходная величина запишется в виде:
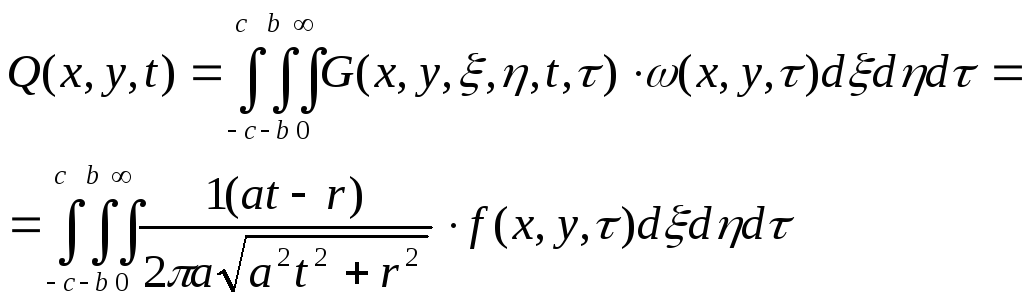
Подставим f(x,y,t) :
![]()
Стандартизирующая функция:
![]()
Изображение по Лапласу стандартизирующей функции:
![]()
Т.е.
![]() ,
,
отсюда
![]()
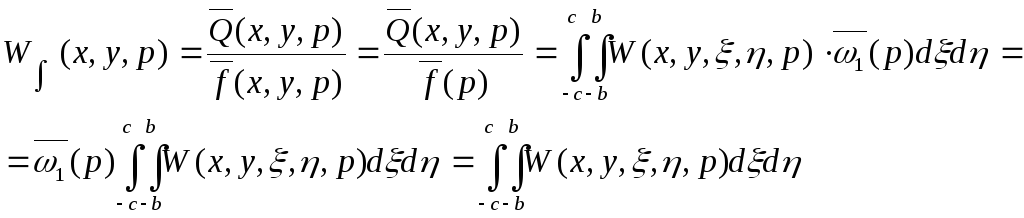
Тогда операторное выражение выходной величины запишется:

Интегральная передаточная функция запишется в виде:
Рассчитаем ИПФ для конкретных значений постоянных
b=0.02 m
c=0.015 m
a=12 m2/s2
x=0 , y=0 – центр пластины конденсатора
В силу сложности интеграла:
![]()
из-за присутствия в нем функции Бесселя , получить аналитическое решение затруднительно , поэтому построим графики используя программу Mathcad
Логарифмическая амплитудно-частотная характеристика:
![]()
Логарифмическая фазочастотная характеристика:
![]()
При проведении аппроксимации определим сопрягающие частоты:
ω1=500;
Тогда
Т1=0.002;
Определим статический коэффициент передачи:
20lgK=-125 K=0.00000057
С помощью аппроксимации передаточная функция запишется в виде:
N(p)=K(Т1p+1)2= 0.0000045 (0.002p+1)2
Фактическая и аппроксимированная ЛАЧХ изображены на рисунке 5, фактическая и аппроксимированная ЛФЧХ - на рисунке 6 (а,б).
![]()
![]()
![]()

![]()
Рисунок 5
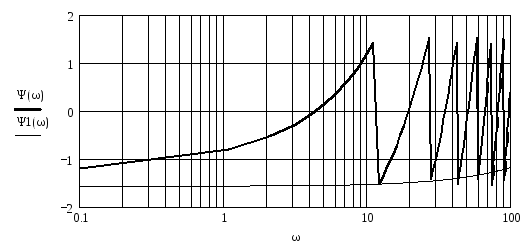

Рисунок 6(а,б)
ЗАКЛЮЧЕНИЕ
В результате выполнения курсовой работы была получена передаточная функция объекта , кроме того было рассмотрено распределенное возмущающее воздействие и найдена реакция объекта на него.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1 Бутковский А.Г. Характеристики систем с распределенными параметрами. - М.: Наука, 1979. -224с.
2 Власов В.В. Синтез интегральной передаточной функции для объектов управления с распределенными параметрами // Школа академика Власова: Сб. метод, тр - М.: Буркин, 1998. -128с.
3 Бесекерский В.А., Попов Н.П. Теория систем автоматического регулирования. М.: Наука. 1966. -992с.
4 Топчеев Ю.И Атлас для проектирования систем автоматического регулирования. - М : Наука. 1989. -752с.
5 Чемоданов Б.К., Иванов В.А., Медведев B.C., Юшенко А.С. Математические основы теории автоматического регулирования. Том 1 - М.: Высшая школа, 1977. -366с.