

1.10.5 Повышение точности за счет применения неединичных ос
Рассмотрим структурную схему, изображенную на рис. 1.

Рисунок 1.10.5.1
Неединичные
обратные связи применяются для уменьшения
ошибки, обусловленной задающим
воздействием
![]() .
.
Задача:
найти передаточную функцию
![]() ,
делающую систему инвариантной по
отношению к задающему воздействию.
,
делающую систему инвариантной по
отношению к задающему воздействию.
Передаточная функция всей системы
![]() . (1.10.5.1)
. (1.10.5.1)
Из равенства (1) найдём
![]() . (1.10.5.2)
. (1.10.5.2)
Сравнивая (2) и (1.10.4.4), видим, что здесь имеются те же проблемы и ограничения по помехозащищённости.
2 Цифровые системы управления
В настоящее время практически все разрабатываемые САУ используют в качестве счетно-решающего прибора управляющие цифровые вычислительные машины (УЦВМ) или микропроцессоры. Их широкое применение связано с рядом больших преимуществ перед аналоговыми вычислительными машинами. Это обусловлено следующим:
УЦВМ позволяет очень быстро изменять алгоритмы управления путём их перепрограммирования в УЦВМ.
УЦВМ позволяет решать очень сложные алгоритмы управления при малых объёмах и весах вычислительной машины.
УЦВМ позволяет одновременно управлять несколькими каналами.
УЦВМ, помимо расчётов по алгоритмам управления, позволяет осуществить проверку всей системы управления и самопроверку, по результатам которых можно осуществить замену вышедших из строя блоков и приборов на резервные блоки и приборы.
С помощью УЦВМ оператор может легко вносить изменения в технологический процесс и работу системы управления УЦВМ с пульта.
УЦВМ позволяет анализировать производительность технологической системы и учитывать количество выпускаемой продукции.
УЦВМ обеспечивает стабильность коэффициентов системы управления.
К недостаткам относится дискретизация процесса управления, которая приводит к некоторому ухудшению показателей качества САУ.
2.1 Функциональная схема сау и её циклограмма работы
Функциональная схема САУ представлена на рис. 1, где
АЦ2П – аналого-цифровой преобразователь (преобразователь напряжения в код УЦВМ);
Ц1Ц2П – преобразователь кода датчиков в код УЦВМ;
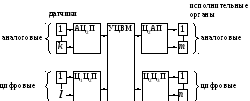
Рисунок 2.1.1 – Функциональная схема САУ с УЦВМ
УЦВМ – управляющая цифровая вычислительная машина;
Ц2АП – цифро-аналоговый преобразователь (преобразователь кода УЦВМ в напряжение исполнительных органов);
Ц2Ц3П – преобразователь кода машины в код исполнительных органов.
ЦВМ является устройством дискретного действия. Вся информация в ней представляется в виде цифровых кодов. Процесс реализации алгоритмов в ЦВМ состоит из последовательно выполняемых алгоритмов и логических операций по заданной программе. Каждая такая операция выполняется за конечное, хотя и маленькое, время, но поскольку операции выполняются последовательно, то время расчёта по заданному алгоритму находится суммированием отрезков времени на проведение каждой операции.
Преобразование сигналов в АЦП, ЦЦП и ЦАП также требует определённого времени. Таким образом, возвращение к выполнению одной и той же операции в алгоритме управления происходит через вполне заметный промежуток времени. Простейшая циклограмма работы представлена на рис. 2, где
![]() –номера алгоритмов;
–номера алгоритмов;
![]() –отрезки времени
просчёта по соответствующему алгоритму;
–отрезки времени
просчёта по соответствующему алгоритму;
![]() –такт счёта
– это тот
промежуток времени, через который
повторяется одна и та же операция.
–такт счёта
– это тот
промежуток времени, через который
повторяется одна и та же операция.

Рисунок 2.1.2 – Циклограмма работы САУ с ЦВМ