

4.3. Алгоритмы плу
В рамках типовых алгоритмов ПЛУ можно отметить следующие алгоритмы:
-
Алгоритмы, обеспечивающие последовательное перемещение рабочего органа (резца, сверла) по заданной траектории.
-
Алгоритмы, обеспечивающие реализацию последовательности технологических операций, сопровождающихся 1)сменой скоростей, 2)изменением направления движения рабочего органа, 3)сменой самого рабочего органа или 4)обрабатываемого объекта.
В качестве примера того рода алгоритмов рассмотрим алгоритм программного управления для сверлильного станка, который должен выполнять циклически повторяющуюся последовательность операций по обработке заготовки. При этом предполагается, что заготовка устанавливается в заданную позицию на рабочем столе и удаляется оттуда манипулятором (см. рис. 4.3.1.).
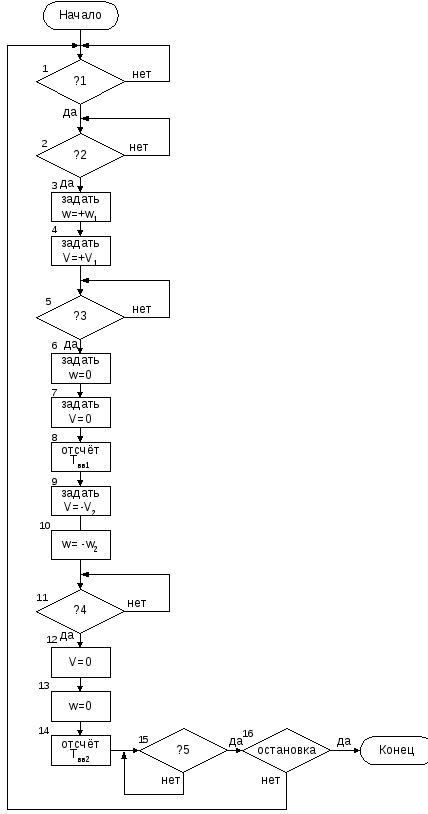
Рис. 4.3.1. Схема алгоритма программного управления сверлильного станка.
Обозначения:
?1 – Установлено сверло?
?2 – Есть заготовка в рабочей позиции?
?3 – Достигло ли сверло конечной позиции?
?4 – Достигло ли сверло начальной позиции?
?5 – Заготовка удалена?
Твв1, Твв2 – Технологические задержки.
w – Число оборотов сверла (шпинделя).
V – Скорость подачи сверла (шпинделя).
4.4 Алгоритмы цифрового двухпозиционного регулирования
Эти алгоритмы являются реализацией релейных законов регулирования и широко используются для объектов, параметры которых могут варьироваться в достаточно широких пределах (3 7%).
Преимущества таких регуляторов:
-
сравнительная простота;
-
дешевизна регулятора и исполнительного устройства, с помощью которого реализуется управляющее воздействие на объект.
Рассмотрим схематично объект с таким регулятором.
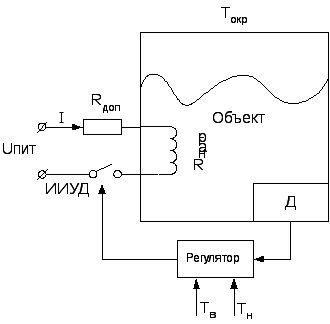
Рис.4.4.1. Схема аппаратных средств системы двухпозиционного регулирования (температуры объекта).
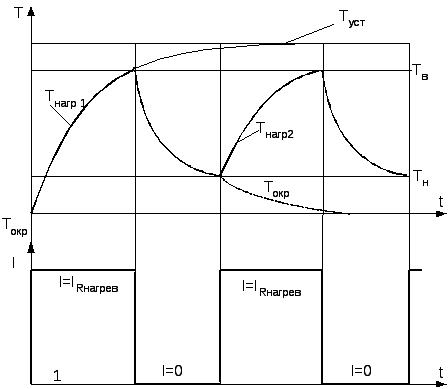
Рис. 4.4.2. Графики зависимости Т и Токр от времени.
Пусть объект таков, что математическая модель, описывающая процессы в нем может быть представлена дифференциальным уравнением первого порядка с постоянными коэффициентами.
![]() ,
,
где Т – температура объекта,
I – ток в нагревательном элементе,
а1—постоянная времени объекта.
k—статический коэффициент передачи.
Функцией регулятора является выполнение следующих действий:
-
если Т объекта меньше Тн, то ИУ надо включить (т.е. подать ток I в нагревательный элемент),
-
если Т объекта больше Тв, то надо ИУ выключить, т.е. обесточить нагревательный элемент.
При включении регулятора, если температура окружающей среды равна температуре объекта, то процесс нагрева объекта Тнагр.1 описывается уравнением (если I=const):
![]()
Процесс остывания, который начинается при Т=Тв и в момент размыкания ИУ, может быть описан таким уравнением:
![]()
Процесс нагрева на последующих участках:
![]()
В случае использования цифровых средств обработки информации в АИУС нужно разработать алгоритмы двухпозиционного регулирования. А в соответствии с ними должны быть разработаны программы, обеспечивающие двухпозиционное регулирование параметров объекта.
Рассмотрим такой алгоритм для n контуров. При этом предполагается, что значения n, Yнi, Yвi — регламентные пределы, ki — коэффициенты пересчета показания датчика в значение технологического параметра (записаны в память компьютера). Кроме того, известны подпрограммы пересчета номера контура i в адрес датчика АДi и подпрограмма пересчета номера контура i в адрес исполнительного устройства – АИУi.
i → АДi
i → АИУi
Тогда алгоритм имеет вид:
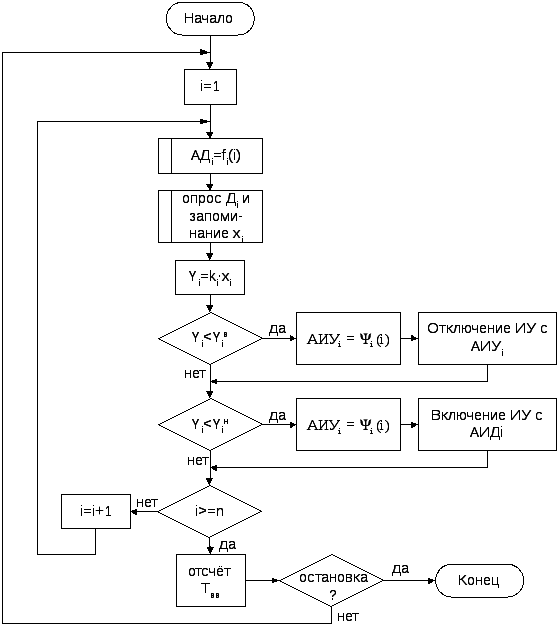
Рис. 4.4.3. Схема алгоритма обеспечивающая двухпозиционное регулирование параметров объекта.