

5.6.1 Специализированные технологические контроллеры
СТК могут быть представлены в виде виртуальных структур, реализующих конкретные алгоритмы управления объектом. При этом разработчикам АИУС (САУ) предоставляется доступ к структуре и параметрам алгоритма управления каким-либо параметром или функцией технологического объекта. То есть, с помощью СТК формируется автоматизированный контур управления (регулирования) в общем, процессе объекта. В качестве алгоритмов или функций, реализуемых в контуре автоматизированного управления, выбираются наиболее типичные. Такой подход позволяет получать малогабаритные надежные аппаратные решения, практически без внесения в структуру СТК аппаратной избыточности.
Конструктивно СТК размещаются в малогабаритных закрытых корпусах, а объектная ориентация осуществляется “программированием” СТК. Для этого в памяти СТК резидентно размещены программные модули, из которых путем их выбора и конфигурирования и формируется нужный алгоритм управления конкретным параметром или функцией объекта. Фактически, избыточность программных модулей, находящихся в ПЗУ СТК, и определяет возможность объектной ориентации программного обеспечения СТК, без программирования алгоритмов управления в обычном понимании.
Интерфейс пользователя обычно организуется с помощью встроенных или подключаемых пультов.
В России из подобных СТК в качестве примера можно назвать Ремиконт-130, который выпускался еще до 90-х годов. Такие устройства назывались типовыми микропроцессорными установками. Он обеспечивает решение задач автоматического регулирования, логического управления и т. д.
Обобщенная структура Р-130 имеет вид:
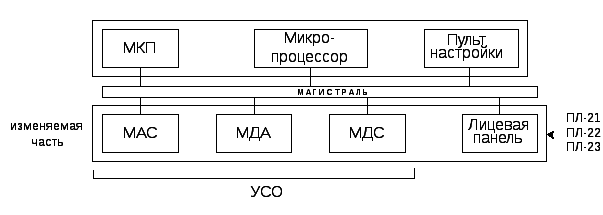
Рис.5.6.1.1. Обобщенная структура аппаратных средств Р-130.
МКП – модуль контроля и программирования;
ПРЦ – модуль процессора;
МАС – модуль аналоговых сигналов (ввод и вывод);
МДС – модуль дискретных сигналов (ввод и вывод);
МДА – модуль дискретных и аналоговых сигналов (ввод и вывод);. К примеру, для МДА (возможны два варианта: а) аналоговые – 16 входов и 2 выхода и 4 дискретных выхода; б) аналоговые – 18 входов и 4 выхода и дискретные – 12 входов 4 выхода).
Пульт настройки – для программирования, настройки и контроля
В Ремиконте предусмотрена возможность выбора блоков при заказе: вид лицевой панели, состав дополнительных узлов, модификация центрального блока.
Ремиконт Р-130 могут объединяться в локальную сеть «ТРАНЗИТ» кольцевой конфигурации, поддерживающую интерфейс ИРПС.
![]()
Рис.5.6.1.2. Локальная сеть «ТРАНЗИТ».
БК – блок контроля;
БП – блок питания с силовыми элементами.
В этой сети информация последовательно передается от одного контроллера к другому.
5.6.2 Одноплатные объектно-программируемые контроллеры (опопк)
Появление однокристальных микроконтроллеров (ОМК) и микроЭВМ позволило создать на их основе средства прямого цифрового управления техническими объектами (высоконадежные, малогабаритные и с низким энергопотреблением) в виде одноплатных контроллеров. Эти ОПОПК конструктивно объединяют на одной плате вычислительный блок, интерфейсные модули, модули УСО и т. д.
Программирование ОПОПК выполняется обычно с помощью внешнего пульта или на специальном инструментальном вычислительном комплексе. Разработанная и отлаженная программа заносится в ПЗУ или ППЗУ ОПОПК.
Принципиально возможно два решения задачи автоматизации ТО с помощью ОПОК:
-
разработка под конкретный объект индивидуально ориентированного контроллера;
-
выбор из ряда универсальных ОПОПК контроллера, наименее избыточного с точки зрения задач АИУС.
В первом случае аппаратная часть ОПОПК создается только с учетом требований конкретного объекта автоматизации и имеет средства индикации и управления, ориентированные на особенности объекта. Выбор аппаратуры для управления некрупными и несложными объектами приводит к необходимости:
-
в небольшом числе входов/выходов дискретного типа и аналогового типа;
-
наличия интерфейса для связи с АСУ верхнего уровня;
-
схем согласования с датчиками и исполнительными устройствами.
Требования к АСУ определяют тип и разрядность МК, объем ОЗУ и ПП. Обычно, в качестве основы ОПОПК выбирают ОМК.
-
семейство MCS-51/151/251 (фирма Intel, фирма Atmel, российский аналог – К1816ХХ51,К1830);
-
семейство PIC: PIC12CXX, PIC14000, PIC16C15X, PIC16C5X, PIC16C6X, PIC16C7X, PIC16C8X, PIC16C9X, PIK 17C*, PIK 18C* фирмы MicroChip;
-
семейство М16С (32 бита) фирмы Mitsubishi Electric;
-
семейство С167 фирмы Siemens и т.д
После выбора МК на уровне стандартизированных схемных решений осуществляется дополнение функциональными и коммуникационными элементами, а также элементами интерфейса пользователя. Примером, иллюстрирующим такой подход, может служить структурная схема ОПОПК на базе МК фирмы Intel 80C51GB, имеющего встроенный 8-канальный АЦП.
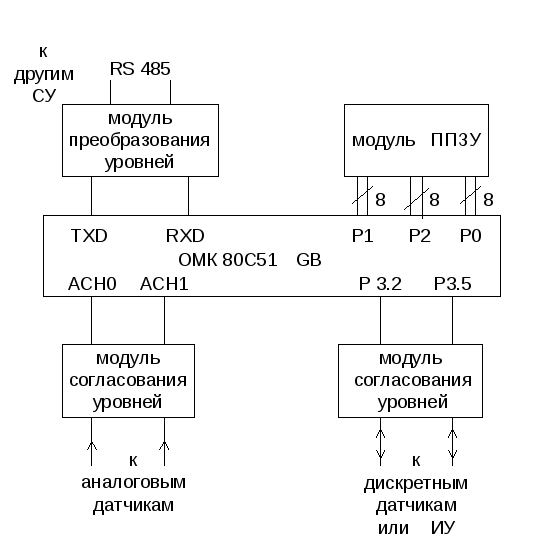
Рис.5.6.2.1. Структурная схема ОПОК ввода и преобразования сигналов и управления.
РО – шина данных,
Р1,Р2 – шина адреса.
Шина адреса к портам Р1 и Р2, шина управления к порту Р3. В качестве системного интерфейса используется шина данных, подключенная к порту Р0. Локальный интерфейс связи контроллера RS 485 подключен через модуль согласования уровней к линиям встроенного интерфейса последовательного обмена RXD, TXD. Аналоговые датчики подключены через МСУ к линиям порта Р4 (АСН0, АСН1).
Все более жесткие требования к программному обеспечению (в смысле универсализации объему программ) сужают область применения ОПОПК на базе ОМК и они в основном применяться для управления несложными объектами.
Их место на рынке ОПОПК занимает ОПК, собираемые на ИС с высокой степенью интеграции, имеющие широкие функциональные возможности, соответствующие возможностям современных компьютеров. Их относят к ряду универсальных одноплатных ОПК (УОПОПК).
На плате УОПОПК обычно находятся (на примере контроллера ЕРС-6 фирмы Radisys на базе шины VME):
-
процессор 80386SX – 20 МГц;
-
память емкостью до 4Мб (динамическая схема);
-
статическая ОЗУ (8кб);
-
ППЗУ емкостью 512кб на схемах FLASH-памяти;
-
блок сопряжения с шиной VME;
-
гнездо шины расширения ЕХМ вариант ISA (можно использовать для подключения сетевого адаптера или же адаптера VGA, модема и т. д.)
-
вариант одноплатного промышленного контроллера РСМ-3860 (Advantech)
УОПОПК позволяет решать все задачи управления: сбор, контроль, индикация, сигнализация, регулирование, стабилизация, оптимальное управление и т. д.
При этом аппаратурная часть ЦСОИ АСУ практически универсальна, реализация же необходимых алгоритмов управления для каждого конкретного объекта происходит на программном уровне с записью в энергонезависимое ПЗУ.