

Лекция 6 Исследование системы на модели в пространстве состояний
Устойчивость замкнутой системы
Используя правило вычисления обратной матрицы, из выражения (15) можно найти полином знаменателя W(p), равный det(pE-A), откуда находим
характеристическое уравнение:
det(pE-A)=0. (16)
В соответствии с необходимым и достаточным условием устойчивости замкнутой системы, получаем, что для устойчивости замкнутой системы требуется, чтобы уравнение det(pE–Азс)=0 имело все корни с отрицательными вещественными частями, но корни этого уравнения в матричной алгебре называются собственными числами матрицы Азс, следовательно, условие устойчивости для модели в пространстве состояний (МПС) имеет следующий вид:
замкнутая система будет устойчивой тогда и только тогда, когда все собственные числа матрицы Азс имеют отрицательные вещественные части.
Управляемость и наблюдаемость объекта управления
Пусть задана модель в пространстве состояний объекта управления (7,9).
Объект называется полностью управляемым, если для него можно подобрать такое управляющее воздействие u(t), с помощью которого можно перевести этот объект из любого заданного начального состояния Z(t0) в любое заданное конечное состояние Z(tкон).
--------------------16-17 билет--------------------
Объект называется полностью наблюдаемым, если все компоненты вектора состояния Z(t) можно вычислить на основании информации о входном и выходном сигналах на интервале времени t <= τ <= T.
Доказаны следующие критерии управляемости и наблюдаемости объекта
Объект будет полностью управляемым тогда и только тогда, когда матрица управляемости
M[nxn] = [B | AB | A2B | … | An-1B]
имеет полный ранг, т.е. rang M = n.
Объект будет полностью наблюдаемым тогда и только тогда, когда матрица наблюдаемости
N = [CT | ATCT | AT^2 CT | … | AT^(n-1) CT]
имеет полный ранг, т.е. rang N = n.
--------------------18 билет------------------------
Понятие о модальном регуляторе
Свойства САР, заданной моделью в пространстве состояний, зависят от собственных чисел матрицы Азс. Например, для устойчивости замкнутой системы требуется, чтобы собственные числа матрицы Азс имели отрицательные вещественные части.
При проектировании
высококачественных систем управления
и фильтров сигналов, обладающих
определенными свойствами, возникает
задача – подобрать обратную связь для
заданного объекта так, чтобы все
собственные числа матрицы Азс
расположились в заранее заданных местах
на комплексной плоскости, в частности,
на окружности некоторого радиуса. Эта
задача сводится к следующему. Для
заданного объекта (A,B,C,D) требуется
определить матрицу k[1xn] так, чтобы все
собственные числа матрицы Азс имели бы
заданные значения на комплексной
плоскости
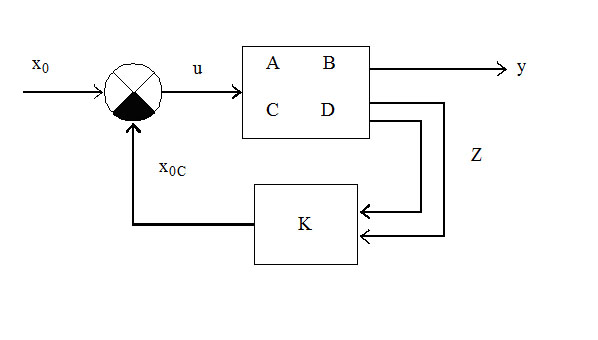
Рис.13. САР с модальным регулятором.
МПС замкнутой системы (рис. 13) получается следующим образом:
dz/dt = Az + Bu ; y = Cz + Du – модель объекта,
xос = k z – модель обратной связи ,
u = x0 – xос –модель устройства сравнения.
Отсюда получаем модель замкнутой системы:
dz/dt = Az + B(x0 – kz) = (A – Bk)z + Bx0 = Азс z+ Bx0,
где Азс = A[nxn] – B[nx1]k[1xn].
Характеристическое уравнение замкнутой системы будет иметь вид:
det(pE – A + Bk) = 0 (17).
Уравнение (17) является уравнением n-ной степени вида
cnpn+cn-1pn-1+….+c0=0 , где ci=fi(k1,…,kn).
Задача сводится к расчету значений k1, …, kn так, чтобы это уравнение имело заданные значения корней p1, …, pn. Доказана следующая теорема:
Задача определения матрицы k[1xn] имеет решение тогда и только тогда, когда объект (A,B,C,D) является полностью управляемым.
Обратная связь по вектору состояния z (рис. 13), обеспечивающая расположение собственных чисел матрицы Азс в заданных местах на комплексной плоскости, называется модальным регулятором.
Таким образом, задача синтеза модели регулятора имеет решение тогда и только тогда, когда объект является полностью управляемым.
--------------------19 билет------------------------
Практическая реализация модального регулятора требует наличия информации о значении всех компонентов вектора состояния z(t) в любой момент времени t, однако чаще всего невозможно (практически) иметь датчики для измерения всех компонентов вектора состояния. В этом случае модальный регулятор можно построить по схеме (рис.14):
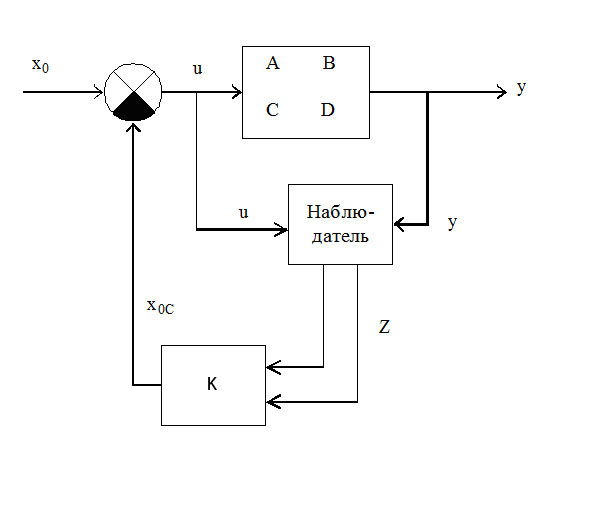
Рис.14. САР с наблюдателем и модальным регулятором.
В этой схеме имеется блок «наблюдатель», который выполняет расчет вектора состояний z на основании информации о сигналах y(t) и u(t). Это возможно, если объект (A,B,C,D) является полностью наблюдаемым. Наблюдатель и модальный регулятор в схеме (рис. 14) реализуются, как правило, в виде соответствующих программ на ЭВМ. Эта реализация возможна только тогда, когда объект является полностью управляемым и полностью наблюдаемым.
--------------------20 билет------------------------