

2. Вимірювальні перетворювачі (сенсори, датчики) План
2.1. Характеристики (параметри) датчиків
2.1.1. Статичні характеристики датчиків
2.1.2. Динамічні характеристики датчиків
2.2. Сфери застосування датчиків
2.3. Класифікація ВП
2.4. Фізичний принцип дії датчиків
2.5. Області використання датчиків
2.5.1. Вимірювання температури
2.5.2. Вимірювання механічних величин
2.5.3. Акустичні датчики
2.5.4. Оптичні вимірювання
2.5.5. Хімічні виміри
2.5.6. Датчики магнітного поля
Назви перетворювачів: датчик, давач, детектор, вимірювач, чутливий елемент, зонд, сенсор, рецептор.
Вимірювання – перетворити неперервну фізичну величину у число (з певною кількістю значущих цифр); Використовують абсолютні та відносні величини, калібрування; Розрізняють природно-квантовані (довжина хвилі світла) та штучно-квантовані (напруга) фізичні величини. Техніка конструювання і застосування датчиків (сенсорика), за останні роки розвилася у самостійну галузь вимірювальної техніки.
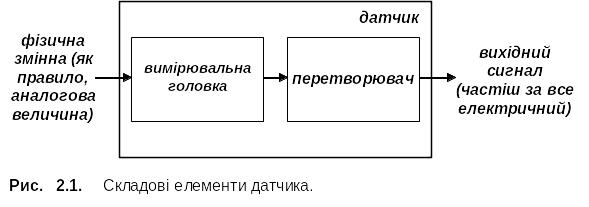
Для більшості фізичних величин існує багато різноманітних вимірювальних технологій, що характеризуються залежністю між сигналом на виході і вимірюваною величиною. Вимірювальний пристрій або датчик (sensor), складається з двох частин – вимірювальної головки (sensor head) і перетворювача (transducer).
“Сенсор” – у відповідності з ГОСТ 16263-70 цей пристрій називається первинним вимірювальним перетворювачем (primary measuring transducer), його частина на яку безпосередньо діє вимірювана величина, – чутливим елементом (detector), а всі наступні складові вимірювального ланцюгу – вимірювальним перетворюванням (measuring transducer).
Вихідний сигнал вимірювального пристрою (датчика) є вихідний сигнал перетворювача. В більшості керуючих систем цей вихідний сигнал, як правило, - і переважно електричний, однак доволі часто зустрічаються і пневматичні датчики.
Розрізняють три класи датчиків:
аналогові датчики, тобто датчики, які виробляють аналоговий сигнал;
цифрові датчики, що генерують послідовність імпульсів або двійковий код;
бінарні (двійкові) датчики, які виробляють сигнал тільки двох рівнів: (0 / 1).
2.1. Характеристики (параметри) датчиків
2.1.1. Статичні характеристики датчиків
Статичні характеристики датчиків показують, наскільки коректно вихід датчика Y відображає вимірювану величину X через деякий час після її зміни, коли вихідний сигнал встановлюється у нове значення. Важливими статистичними параметрами являються: чутливість, роздільна здатність, лінійність, дрейф, робочий діапазон, повторюваність і відтворюваність результату.
Чутливість (sensitivity) датчика визначається як відношення величини вихідного сигналу до одиничної вхідної величини
Sn(X) = dY / dX,
де X – вхідний сигнал, Y – вихідний.
Роздільна здатність (resolution) – це найменша зміна вимірюваної величини, котра може бути зафіксована і точно показана датчиком.
Точність (accuracy) визначає різницю між вимірюваною і дійсною величиною; вона може бути стосуватися датчика в цілому або до конкретного його показника.
Лінійність (linearity) не описується аналітично, а визначається виходячи з градаційної кривої датчика. Статична градаційна крива показує залежність вихідного сигналу від вхідного при стаціонарних умовах. Наближення цієї кривої до прямої лінії і визначає степінь лінійності.
Статичне підсилення (static gain) чи підсилення по постійному струму (d.c. gain) – це коефіцієнт підсилення датчика на дуже низьких частотах.
Дрейф (drift) визначається як відхилення показників датчика, коли вимірювана величина залишається постійною на протязі довготривалого моменту часу. Величина дрейфу може визначатися при нульовому, максимальному чи деякому проміжному значенні вхідного сигналу.
Передавальна характеристика ВП Y=f(X), де X – сигнал довільної фізичної природи.
Смуга пропускання (bandwidth) при передачі інформації і керуванні зі зворотнім зв’язком означає діапазон частот, в межах якого амплітудно-частотна характеристика залишається не меншою заданого значення (як правило 0,707 від максимального). Сигнал, що передаються від датчика по електричному провіднику, може піддаватися дії шумів під впливом середовища через небажані зв’язки резистивного, індуктивного чи ємнісного характеру. Цей шум може спотворити вихідний сигнал.