36. Классификация сар
По способу приспособления:
Неприспосабливаемые и приспосабливаемые.
По роду задач регулирования:
Автоматической стабилизации; программного регулирования; следящие системы.
По принципу регулирования:
С воздействием по регулируемому параметру; по возмущающему воздействию; комбинированные системы.
По числу контуров регулирования:
Одноконтурные; Многоконтурные.
По наличию в системе усилителя:
Прямого действия; непрямого действия.
По характеру регулирования во времени:
Непрерывные; Прерывистые (реллельные и импульсные).
По свойствам в установившимся режиме:
Статические регуляторы; астатические регуляторы; изодромные регуляторы.
По виду уравнивания системы:
Линейные; нелинейные; линеализиривонные.
37.Принципы регулирования.
1. Системы с регулированием или воздействия по регулируемому параметру (компенсационными):
Принцип хорош, в том плане, что позволяет достичь результата не зависимо от того, какой причиной вызвано отклонение.
Недостаток: относительно высокая длительность регулирования. Может возникать колебательный процесс.
2. Принцип регулирования по возмущению (принцип Панселе – Чеколаева):
Применение принципа позволяет быстро изменить параметры системы для компенсации основного возмущающего воздействия и при необходимости выполнять регулировки за счет других факторов.
3. Комбинированный принцип:
Представляет собой сочетание 1-го и 2-го способа регулирования.
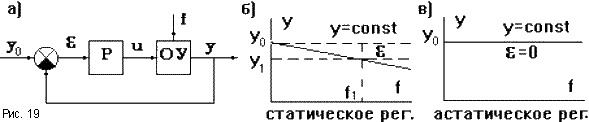
38. Особенности астатических и изодромных сар:
1. Астатические САР – системы в которых регулируемый параметр при различных значениях внешних возмущающих воздействиях принимает в установившимся режиме значение, независящее от возмущаещего воздействия.
2. Изодромные САР – представляют собой комбинацию астатических и статических САР.
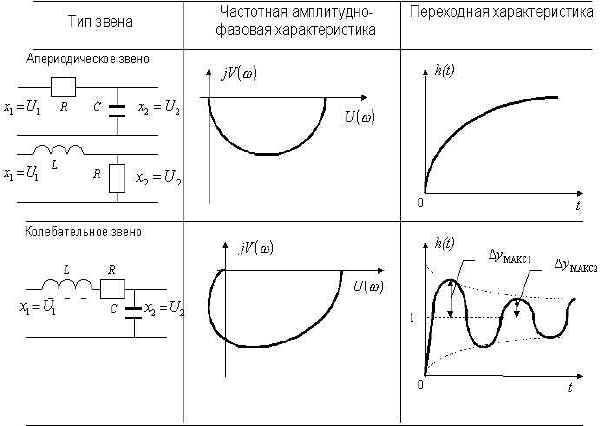
39. Звенья сар и их характеристики
Частотные и переходные характеристики типовых звеньев
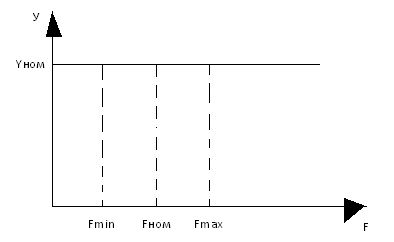
40. Статические характеристики звеньев сар
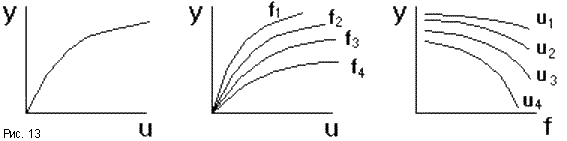
Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени, называется установившимся, или статическим режимом. Любое звено и САУ в целом в данном режиме описывается уравнениями статики вида y = F(u,f), в которых отсутствует время t. Соответствующие им графики называются статическими характеристиками. Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u) (рис.13). Если звено имеет второй вход по возмущению f, то статическая характеристика задается семейством кривых y = F(u) при различных значениях f, или y = F(f) при различных u.
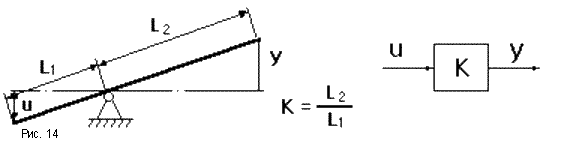
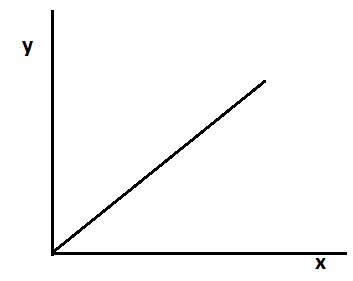
Так примером одного из функциональных звеньев системы регулирования воды в баке (см. выше) является обычный рычаг (рис.14). Уравнение статики для него имеет вид y = Ku. Его можно изобразить звеном, функцией которого является усиление (или ослабление) входного сигнала в K раз. Коэффициент K = y/u, равный отношению выходной величины к входной называется коэффициентом усиления звена. Когда входная и выходная величины имеют разную природу, его называют коэффициентом передачи.
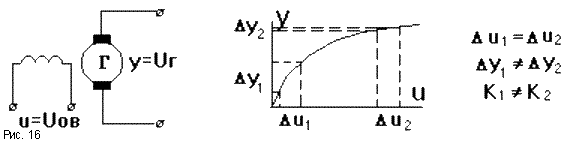
Статическая характеристика данного звена имеет вид отрезка прямой линии с наклоном a = arctg(L2/L1) = arctg(K) (рис.15). Звенья с линейными статическими характеристиками называются линейными. Статические характеристики реальных звеньев, как правило, нелинейны. Такие звенья называются нелинейными. Для них характерна зависимость коэффициента передачи от величины входного сигнала: K = дельта y / дельта u не равнр const.
Например, статическая характеристика насыщенного генератора постоянного тока представлена на рис.16. Обычно нелинейная характеристика не может быть выражена какой-либо математической зависимостью и ее приходится задавать таблично или графически.


Зная статические характеристики отдельных звеньев, можно построить статическую характеристику САУ (рис.17, 18). Если все звенья САУ линейные, то САУ имеет линейную статическую характеристику и называется линейной. Если хотя бы одно звено нелинейное, то САУнелинейная.
Звенья,
для которых можно задать статическую
характеристику в виде жесткой
функциональной зависимости выходной
величины от входной, называются статическими.
Если такая связь отсутствует и каждому
значению входной величины соответствует
множество значений выходной величины,
то такое звено называется астатическим.
Изображать его статическую характеристику
бессмысленно. Примером астатического
звена может служить двигатель, входной
величиной которого является напряжение U,
а выходной - угол поворота вала  ,
величина которого при U
= const может
принимать любые значения. Выходная
величина астатического звена даже в
установившемся режиме является функцией
времени.
,
величина которого при U
= const может
принимать любые значения. Выходная
величина астатического звена даже в
установившемся режиме является функцией
времени.

42. Свойства основных динамических звеньев САР.
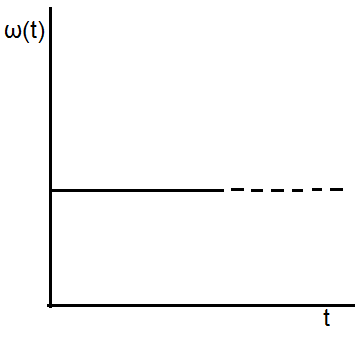
- Безынерционное (усилительное) звено называется звено, характеризуемое и в статике, и в динамике алгебраическим уравнением: у=кх
Передаточная
функция звена:![]() W(p)=
W(p)=![]() ;
;
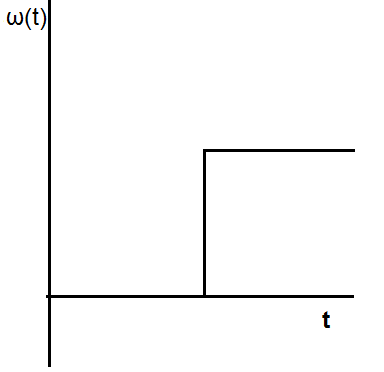
Переходная функция звена: ω(t)=1 ; - характеризует изменение передаточной функции во времени.
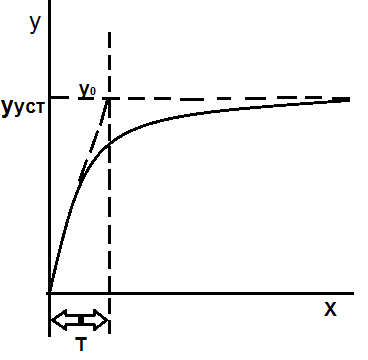
- Апериодическое звено имеет функцию:
![]() (нагрев)
(нагрев)
Передаточная
функция звена:
W(p)=![]() ;
;
Переходная функция звена графически:
- Динамическое звено с запаздыванием: у=к(х-х0) , х>0 (перемещение)
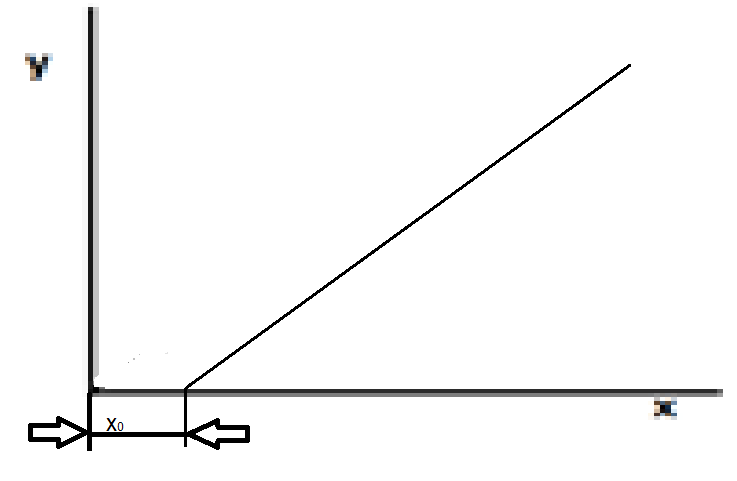
Передаточная и переходная функция звена практически такие же.
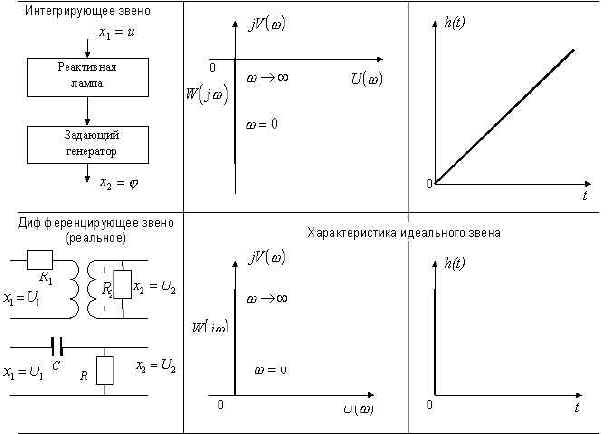
Динамические звенья ещё бывают: интегрирующие, дифференцирующие, форсирующие, колебательные, запаздывающие.
41. Динамические характеристики звеньев САР.
Динамическая характеристика звеньев включает в себя передаточную функцию, частотные характеристики и переходную функцию.
Динамическая характеристика звеньев характеризует соотношение между входными и выходными характеристиками САР в динамике.
Передаточная
функция является функцией комплексного переменного p,
обозначается:
W(p)=![]() в
операторе.
в
операторе.
Передаточная функция характеризует динамику объекта по определенному каналу, связывающему вход объекта с выходом. Если в объекте имеется несколько входов, то каждому каналу связи входа с выходом будет соответствовать своя передаточная функция.
Если известна передаточная функция объекта, то изображение выхода объекта у(р) равно произведению передаточной функции на изображение входа х(р): у(р)=W(р)х(р).
Частотные характеристики:
фазовые, амплитудные, амплитудно-фазные} - выходная функция динамического звена представлена в виде периодических колебаний. у=А(х)sin(ωt+φ).
Эта характеристика позволяет определить стойчивость САР. Существующие методы определяют динамическую устойчивость САР на основании построения годографов частотных характеристик.


jωt






 колебательная
система
колебательная
система

 с
возрастанием
ω=0
с
возрастанием
ω=0





 Затух
у(х)
Затух
у(х)
-1
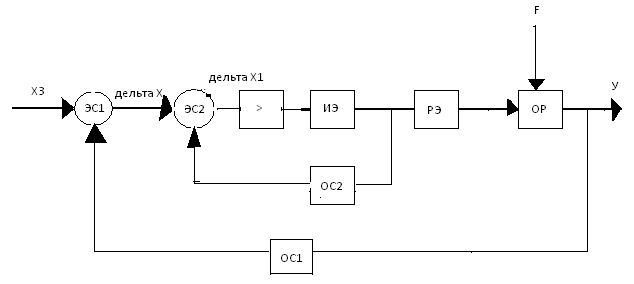
43. Соединение звеньев САР.
Любая самая сложная структурная схема может быть изображена с помощью трех основных типов соединения: - параллельного (рис. 2); - последовательного и соединения с обратной связью.
- При параллельном соединении входные сигналы всех звеньев одинаковы и равны входу системы х(р), а выход системы у(р) равен сумме выходов звеньев
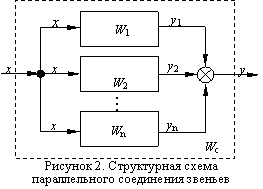 .
.
- Последовательное соединение звеньев. Особенностью является то, что выход предыдущего звена является входом последующего (рис. 3).
|
|
|
|
|
|
|
|

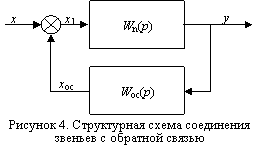
- Соединение звеньев с обратной связью. Обратной связью называют передачу сигнала с выхода звена на его вход (рис. 4), где сигнал обратной связи хос алгебраически суммируется с внешним сигналом х(p). Причем, если суммарный сигнал x1(p) определяется соотношением x1(p) = x(p) + xoc(p), то обратная связь называется положительной, если x1(p) = =x(p) – xoc(p), т.е. сигнал обратной связи вычитают из внешнего сигнала, то обратная связь называется отрицательной.