Вопрос 13: Методы распознавания, основанные на использовании системы признаков. Понятие дерева-графа распознавания
В данном случае также используются эталоны объектов. Однако, в качестве непосредственных элементов сравнения выступают не элементы изображений объекта и эталона, а признаки объекта и эталона. Использование признаков в качестве элементов сравнения позволяет резко сократить объём данных, хранящихся в памяти системы, и время обработки информации по сравнению с вышерассмотренными методами.
Однако следует иметь в виду, что на
практике в реальных условиях наблюдения
выделение признаков объектов всегда
осуществляется с некоторой погрешностью.
Путём моделирования работы АТСН на
стадии проектирования (или на этапе
обучения калибровкисистемы) следует
выявить характер и степень возможного
рассеяния оценок используемых признаков
для каждого из ожидаемых объектов
(рис.3.2).

С учётом вида полученных гистограмм устанавливаются оптимальные границы диапазонов значений того или иного признака, которые используются при формировании решающего. Очевидно, что подобные семейства гистограмм должны быть заблаговременно получены для каждого из рабочих признаков,и спользуемых при идентификации объектов. При большом числе возможных вариантов может быть рекомендован многоступенчатый (иерархический) алгоритм. При этом на каждой ступени распознавания используется какой"либо из признаков объекта (площадь, периметр, радиусы вписанных и описанных окружностей, моменты инерции, число и расположение углов и т.д.). Пусть возможны K решений (K альтернатив). Тогда алгоритм распознавания можно представить в виде дерева (графа) (рис. 3.3).
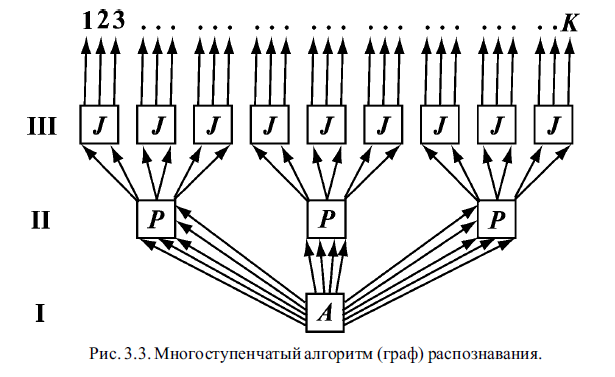
Здесь I , II, III, .. – уровни распознавания; A, P, J, .. – алгоритмы сравнения по площади, периметру, моментам инерции и т.д., включая выделение соответствующих признаков изображений объектов; 1, 2, 3, .. K – номера возможных решений. Важно отметить, что наибольший эффект сокращения времени обработки информации достигается при рациональном распределении типов используемых признаков по уровням распознавания. Так, на нижних уровнях, когда приходится иметь дело с максимальным числом вариантов, следует привлекать признаки, не требующие больших вычислительных затрат на их определение (например, площади и периметры объектов), а наиболее информативные (такие, например, как моменты инерции) – применять на верхнем уровне, где число альтернатив минимально. В разделе 4 мы более подробно познакомимся с подобным подходом на конкретном примере реализации алгоритма распознавания изображения участка звёздного неба в автономной системе астроориентации. Рис. 3.3. Многоступенчатый алгоритм (граф) распознавания.
Вопрос 14: Об измерении параметров объектов наблюдения.Определение геометрического и энергетического центров, угла разворота
Очевидно, измерение размеров объекта может осуществляться посредством выделения на этапе предварительной обработки соответствующих геометрических признаков, например, площади и периметра изображения, размеров вписанных и описанных геометрических фигур (см. раздел 2.5).
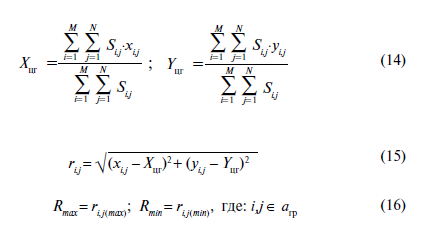
Измерение пространственного положения объекта сводится к измерению координат характерных точек его изображения в приборной системе координат. Такими точками могут, например, служить геометрический или энергетический центры изображения (ф. 14, 15, 16 и ф.19).
 В
случ
В
случ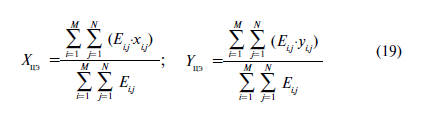 ае
необходимости измерения координат
точечных объектов в сложных условиях
наблюдения при малых отношениях
сигнал/шум эффективным может оказаться
более сложный алгоритм интерполяции
видеосигнала по методу наименьшего
среднеквадратического отклонения,
подробно описанный в разделе 4.1. Как
указывалось выше, иногда в задачах
распознавания возникает необходимость
компенсации взаимного разворота
изображений объекта и эталона. При этом
приходится решать вспомогательную
задачу – определение угла наклона
главной энергетической осиизображения
объекта в приборной системе координат
ае
необходимости измерения координат
точечных объектов в сложных условиях
наблюдения при малых отношениях
сигнал/шум эффективным может оказаться
более сложный алгоритм интерполяции
видеосигнала по методу наименьшего
среднеквадратического отклонения,
подробно описанный в разделе 4.1. Как
указывалось выше, иногда в задачах
распознавания возникает необходимость
компенсации взаимного разворота
изображений объекта и эталона. При этом
приходится решать вспомогательную
задачу – определение угла наклона
главной энергетической осиизображения
объекта в приборной системе координат
(рис. 3.4)
 (35)
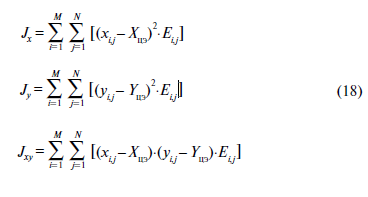
(35)
где Jx , Jy, Jxy – промежуточные моменты инерции изображения объекта, способ вычисления которых рассмотрен в разделе 2.5 (формула 18)