

6.3. Понятие устойчивости системы
Под устойчивостью системы понимается способность ее возвращаться к состоянию установившегося равновесия после снятия возмущения, нарушившего это равновесие. Неустойчивая система непрерывно удаляется от равновесного состояния или совершает вокруг него колебания с возрастающей амплитудой.
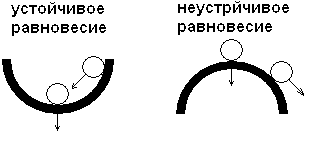
Рисунок 6.7 – К понятию устойчивости системы.
Устойчивость линейной системы определяется не характером возмущения, а структурой самой системы (рис.6.7.). Говорят, что система устойчива "в малом", если определен факт наличия устойчивости, но не определены ее границы. Система устойчива "в большом", когда определены границы устойчивости и то, что реальные отклонения не выходят за эти границы.
В САУ, работающей по отклонению, регулятор изменяет управляющий сигнал после того, как появилось отклонение регулируемого параметра от заданного значения. Следовательно, он должен не только компенсировать возмущающее воздействие, но и свести к нулю отклонение регулируемого параметра от заданного значения, т.е. регулятору предстоит форсированная работа.
При этом могут быть следующие случаи:
1. Регулятор вырабатывает управляющий сигнал недостаточной мощности. При этом скорость нарастания отклонения регулируемого параметра от заданного значения уменьшается, но само отклонение продолжает расти. График процесса регулирования - изменение во времени выходного сигнала Yвых (t) системы после нанесения на нее возмущающего воздействия – будет расходящийся, а работа САУ -неустойчивой (рис. 6.8а). Отклонение выходной величины Yвых(t) от установившегося значения Yо (t)= Yвых(t) = 0
Δi = Yi (t)- Yо(t)
увеличивается c течением времени, i = 1, 2, 3, … .
2. Регулятор вырабатывает управляющий сигнал избыточной мощности, который не только компенсирует возмущающее воздействие и сводит к нулю отклонение регулируемого параметра от заданного значения, но и вызывает новое отклонение Δi , противоположное по знаку и большей амплитуды (рис. 6.8б). График процесса регулирования в такой САУ также будет расходящийся (расходится с заданием), а работа САУ - неустойчивой.
3. Регулятор вырабатывает управляющий сигнал необходимой мощности. При этом регулируемый параметр или плавно возвращается к заданному значению (апериодический процесс регулирования), или возвращается к нему через колебания уменьшающейся амплитуды (колебательный процесс регулирования). Такие графики процессов регулирования называются сходящимися, а работа САУ будет устойчивой (рис. 6.8в).
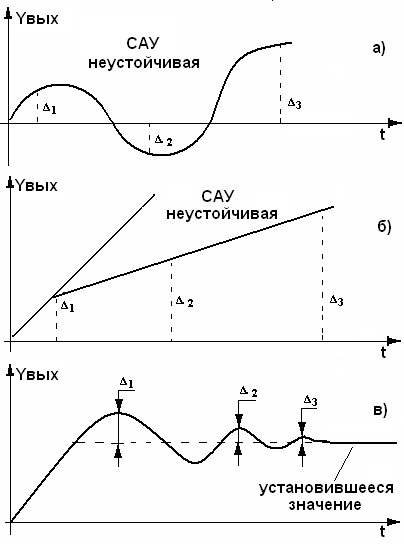
Рисунок 6.8 – Графики процессов регулирования в САУ:
а) с выходным сигналом регулятора недостаточной мощности;
б) с выходным сигналом регулятора избыточной мощности;
в) с выходным сигналом регулятора необходимой мощности.
Неустойчивые системы неработоспособны. Но кроме устойчивости, САУ должна отвечать требованиям по качеству своей работы.