

1Механика - раздел физики, который рассматривает простейшую форму движения материи - механическое движение. Под механическим движением понимают изменение положения изучаемого тела в пространстве со временем относительно некоторого гола или системы тел, условно считаемых неподвижными. Такую систему тел вместе с часами, в качестве которых может быть выбран любой периодический процесс, называют системой отсчета (С.О.). С.О. часто выбирают из соображений удобства. Для математического описания движения с С.О. связывают систему координат, часто прямоугольную. Простейшее тело в механике - материальная точка. Это тело, размерами которого в условиях денной задачи можно пренебречь. Всякое тело, размерами которого пренебречь нельзя, рассматривают как систему материальных точек. Механика подразделяется на кинематику, которая занимается геометрическим описанием движения, не изучая его причин, динамику, которая изучает законы движения тел под действием сил, и статику, которая изучает условия равновесия тел.
Что такое материальная точка?
МТ – это тело, формами и размерами которого можно пренебречь в
условиях данной задачи. Для описания движения необходимо ввести систему
отсчета: 1) тело отсчета 2) система координат 3) часы
1-3) Что такое траектория, скорость и путь?
Траектория – линия, по которой движется в пространстве мат. точка.
r(t) = x(t)*i + y(t)*j + z(t) * k. Движение можно определить, если
известны x(t), y(t), z(t).
Скорость – это вектор, равный отношению dr / dt. Из определения скорости
следует, что скорость направлена всегда по касательной к траектории. V =
V(x)*i + V(y)*j + V(z)*k, написать |V| = …
Путь – это длина траектории, пройденной телом за рассматриваемый интервал
времени. При бесконечно малом инт-ле времени, путь тоже бесконечно малая
величина. dS = V * dt
[pic]
1-4) Что такое ускорение, нормальное ускорение, ?-ускорение?
a = dV/dt = d^2r/dt^2, расписать по осям и написать модуль
В общем случае ускорение направлено произвольным образом.
Тангенциальное ускорение характеризует изменение скорости по величине.
Нормальное ускорение характеризует изменение скорости по направлению.
Связь между угловыми и линейными скоростями и ускорениями. Вращательное движение. Связь между векторами линейной и угловой скоростей, линейного и углового ускорений. Мера вращательного движения: угол φ, на который поверн.тся радиус-вектор точки в плоскости, нормальной к оси вращения.
Равномерное вращательное движение: за любые равные промежутки времени тело поворачивается на одинаковые углы.
Средняя угловая скорость тела равна отношению угла поворота к промежутку времени.
Мгновенная
угловая скорость
равна пределу отношения угла поворота
к промежутку времени
![]() .
Направление вектора
.
Направление вектора
![]() зада.тся
правилом правого винта.
Среднее
угловое ускорение
εср.
- величина, равная отношению изменения
угловой скорости к промежутку времени
зада.тся
правилом правого винта.
Среднее
угловое ускорение
εср.
- величина, равная отношению изменения
угловой скорости к промежутку времени
![]()
Мгновенное угловое ускорение - предел отношения изменения угловой скорости к промежутку времени
![]()
Направление
![]() определяется
направлением
определяется
направлением
![]() .
При
равноускоренном вращательном движении
ε
= const
- угловое ускорение постоянно. Тогда
из
.
При
равноускоренном вращательном движении
ε
= const
- угловое ускорение постоянно. Тогда
из
 а
из
а
из
 При
равномерном вращательном движении
точки по окружности е. скорость v не
меняется по величине
При
равномерном вращательном движении
точки по окружности е. скорость v не
меняется по величине
![]() ,
но меняется по направлению
,
но меняется по направлению
![]() .
.
Найдем связь линейной v и угловой ω скоростей. Из формулы для ω т.к. Δφ•R = ΔS в пределе получаем
![]() ,
отсюда
,
отсюда
![]()
Определим величину центростремительного ускорения:
|
ΔOAB подобен т.к. стороны их перпендикулярны. Отсюда
Найдем ускорение
|
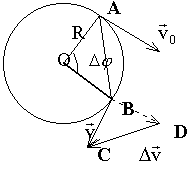
Но
![]() ,
следовательно
,
следовательно

![]()
При
R
= const
изменение угловой скорости обусловлено
изменением линейной скорости, т.е.
![]()
![]() Период
вращения T
- время оборота точки по окружности до
совпадения с начальным положением.
Период
равен
Период
вращения T
- время оборота точки по окружности до
совпадения с начальным положением.
Период
равен
 .
Частота
вращения
.
Частота
вращения
![]() -
число полных оборотов в единицу времени.
При равномерном вращении за период
T
радиус-вектор точки поверн.тся на угол
2π.
Тогда угловая скорость точки равна
-
число полных оборотов в единицу времени.
При равномерном вращении за период
T
радиус-вектор точки поверн.тся на угол
2π.
Тогда угловая скорость точки равна
![]() и
называется иначе угловой
(циклической) частотой.
и
называется иначе угловой
(циклической) частотой.
2 Инерция (от лат. inertia — бездействие), инертность (в механике), свойство материальных тел, находящее отражение в 1-м и 2-м законах механики. Когда внешние воздействия на тело (силы) отсутствуют или взаимно уравновешиваются, И. проявляется в том, что тело сохраняет неизменным состояние своего движения или покоя по отношению к так называемой инерциальной системе отсчёта. Если же на тело действует неуравновешенная система сил, то свойство И. сказывается в том, что изменение состояния покоя или движения тела, т. е. изменение скоростей его точек, происходит постепенно, а не мгновенно; при этом движение изменяется тем медленнее, чем больше И. тела. Мерой Инерции тела является его масса.Термин "И." применяют ещё по отношению к различным приборам, понимая под И. прибора его свойство показывать регистрируемую величину с некоторым запаздыванием. (Большая советская энциклопедия)Инерция, мех., это общее свойство материи, неспособность тела без содействия внешних сил изменить свое состояние покоя или движения; каждое тело пребывает в своем состоянии покоя или равномерного, прямолинейного движения, если действующие на него силы не принуждают его изменить это состояние. (Малый энциклопедический словарь Брокгауза и Ефрона)Инерция, это явление сохранения скорости прямолинейного равномерного движения или состояния покоя при компенсации внешних воздействий. Инерция присуща всем материальным объектам в одинаковой степени. (Cловарь по естественным наукам. Глоссарий.ру)МАССА (от латинского massa - глыба, ком, кусок), фундаментальная физическая величина, определяющая инертные и гравитационные свойства всех тел - от макроскопических тел до атомов и элементарных частиц. Как мера инертности масса была введена И. Ньютоном с помощью определения импульса p=mu (m и u - масса и скорость тела) и в дальнейшем использовалась при формулировке второго Ньютона закона механики в виде F= ma (a - ускорение, F - сила). В качестве меры гравитационного взаимодействия масса входит во всемирного тяготения закон и определяет, в частности, вес тела. В системе СИ масса измеряется в кг. При движении тел со скоростями, близкими к скорости света с, понятие масса теряет свое значение в качестве меры инертных и гравитационных свойств. Согласно соотношению А. Эйнштейна E0= mc2, масса тела m характеризует лишь его энергию покоя E0 и совпадает с массой покоя. И́мпульс (Количество движения) — векторная физическая величина, характеризующая меру механического движения тела. В классической механике импульс тела равен произведению массы m этой точки на её скорость v, направление импульса совпадает с направлением вектора скорости:
![]() .Си́ла —
векторная
физическая
величина,
являющаяся мерой интенсивности
воздействия на данное тело
других тел, а также полей.
Приложенная к массивному
телу сила является причиной изменения
его скорости
или возникновения в нём деформаций.[1]Сила
как векторная величина характеризуется
модулем,
направлением
и «точкой»
приложения
силы. Последним параметром понятие о
силе, как векторе в физике, отличается
от понятия о векторе в векторной
алгебре,
где равные по модулю и направлению
векторы, независимо от точки их
приложения, считаются одним и тем же
вектором .
.Си́ла —
векторная
физическая
величина,
являющаяся мерой интенсивности
воздействия на данное тело
других тел, а также полей.
Приложенная к массивному
телу сила является причиной изменения
его скорости
или возникновения в нём деформаций.[1]Сила
как векторная величина характеризуется
модулем,
направлением
и «точкой»
приложения
силы. Последним параметром понятие о
силе, как векторе в физике, отличается
от понятия о векторе в векторной
алгебре,
где равные по модулю и направлению
векторы, независимо от точки их
приложения, считаются одним и тем же
вектором .
Второй закон Ньютона гласит, что в инерциальных системах отсчета ускорение материальной точки по направлению совпадает с приложенной силой, а по модулю прямо пропорционально модулю силы и обратно пропорционально массе материальной точки. Или, что эквивалентно, в инерциальных системах отсчета скорость изменения импульса материальной точки равна приложенной силе.Притяжение существует не только между Землей и телами, находящимися на ней. Притягиваются между собой Луна и Земля. Притяжение Земли к Луне вызывает приливы и отливы воды. Огромные массы воды поднимаются в океанах и морях дважды в сутки на много метров. Притяжение всех тел Вселенной друг к другу называется всемирным тяготением. Английский ученый Исаак Ньютон первым доказал и установил закон всемирного тяготения. Согласно этому закону, силы притяжения между телами тем больше, чем больше массы этих тел. Силы притяжения между телами уменьшаются, если увеличивается расстояние между ними. Для всех живущих на Земле особенно важное значение имеет сила притяжения тел к Земле. Сила, с которой Земля притягивает к себе тело, называется силой тяжести. Сила тяжести обозначается буквой F с индексом: Fтяж. Она всегда направлена вертикально вниз. Сила тяжести прямо пропорциональна массе этого тела. Вес — сила воздействия тела на опору (или другой вид крепления в случае подвешенных тел), препятствующую падению, возникающая в поле сил тяжести. Единица измерения веса в СИ — ньютон, иногда используется единица СГС — дина.
Вес
в инерциальной
системе отсчёта
![]() совпадает
с силой тяжести и пропорционален массе
совпадает
с силой тяжести и пропорционален массе
![]() и
ускорению
свободного падения
и
ускорению
свободного падения
![]() в
данной точке:
в
данной точке:
![]()
Значение веса (при неизменной массе тела) пропорционально ускорению свободного падения, которое зависит от высоты над земной поверхностью, и, ввиду несферичности Земли, от географических координат точки измерения. Другим фактором, влияющим на ускорение свободного падения и, соответственно, вес тела, являются гравитационные аномалии, обусловленные особенностями строения земной поверхности и недр в окрестностях точки измерения.
При
движении системы тело — опора (или
подвес) относительно инерциальной
системы отсчёта
c ускорением
![]() вес
перестаёт совпадать с силой тяжести:
вес
перестаёт совпадать с силой тяжести:
![]()
3.
Первый закон Ньютона.
Всякое тело продолжает оставаться в своем состоянии покоя или равномерного
прямолинейного движения, пока приложенные силы не заставят его изменить это
состояние. Само явление сохранения скорости постоянной называется инерцией.
Второй закон Ньютона.
Ускорение, сообщенное телу, прямо пропорционально силе, действующей на тело,
и обратно пропорционально массе тела.
Третий закон Ньютона.
Действия двух тел друг на друга равны, но противоположны по направлению. Этот
закон показывает, что из-за взаимодействия тел силы всегда появляются парами.
ÞСила возникает при взаимодействии тел.
Применение законов Ньютона к движению материальной точки по окружности.
Точка может двигаться по окружности, если она обладает центростремительным
ускорением. Для этого ей надо сообщить центростремительную силу, которая
является мерой воздействия на точку всех внешних тел или объектов. Такими
силами могут быть: Земля (сила тяжести), нить (реакция опоры) или несколько
тел.
Инерциа́льная систе́ма отсчёта (ИСО) — система отсчёта, в которой справедлив закон инерции: все свободные тела (то есть такие, на которые не действуют внешние силы или действие этих сил компенсируется) движутся прямолинейно и равномерно или покоятся[
ГАЛИЛЕЯ ПРЕОБРАЗОВАНИЕ
преобразование,
определяющее в классич. механике переход
от одной инерциальной системы отсчета
к другой, движущейся относительно
первой прямолинейно и равномерно. При
этом система отсчета понимается как
четырехмерная, позволяющая фиксировать
три пространственные координаты и
отсчет часов (время). Если задана
инерциальная система отсчета
![]() ,
то во всякой другой инерциальной системе
,
то во всякой другой инерциальной системе
![]() движущейся
относительно нее прямолинейно и
равномерно, координаты
движущейся
относительно нее прямолинейно и
равномерно, координаты
![]() связаны
(с точностью до переноса начала и
поворота осей) с координатами
связаны
(с точностью до переноса начала и
поворота осей) с координатами
![]() преобразованиями
Галилея
преобразованиями
Галилея
![]()
где
![]() -
компоненты скорости движения системы
-
компоненты скорости движения системы
![]() относительно
системы
относительно
системы
![]() .
.
Основные законы
классич. механики инвариантны относительно
Г. п., но, напр., уравнение распространения
фронта световой волны (электромагнитное
явление) не инвариантно относительно
Г. п. По этой причине Г. п. были обобщены
X. Лоренцом (Н. Lo-rentz, см. Лоренца
преобразование).
Эти
преобразования легли в основу специальной
теории относительности. Преобразования
Лоренца переходят в Г. п. при
![]() .
.
Г. п. образуют группу, являющуюся подгруппой группы неоднородных преобразований Галилея, называемой группой Галилея, к-рая получается из группы Г. п. добавлением преобразований смещения начала координат в трехмерном пространстве и начала отсчета времени.
4
Закон сохранения импульса.
Геометрическая сумма импульсов тел, составляющих замкнутую систему, остается
постоянной при любых движениях и взаимодействиях тел системы. Замкнутая
система тел - совокупность тел, взаимодействующих между собой, но не
взаимодействующих с другими телами. Импульс - одна из немногих сохраняющихся
величин.
Центр масс системы материальных точек. Законы его движения.
В механике Галилея—Ньютона из-за независимости массы от скорости импульс системы может быть выражен через скорость ее центра масс. Центром масс (или центром инерции) системы материальных точек называется воображаемая точка С, положение которой характеризует распределение массы этой системы. Ее радиус-вектор равен

где
![]() и
и
![]() -
соответственно масса и радиус-вектор
-
соответственно масса и радиус-вектор
![]() -й
материальной точки;
-й
материальной точки;
![]() -
число материальных точек в системе;
-
число материальных точек в системе;
![]() -
масса системы. Скорость центра масс:
-
масса системы. Скорость центра масс:

Учитывая,
что
![]() ,
а
,
а
![]() есть
импульс
есть
импульс
![]() системы,
можно написать:
системы,
можно написать:
![]() .
Т.е. импульс системы равен произведению
массы системы на скорость её центра
масс.
.
Т.е. импульс системы равен произведению
массы системы на скорость её центра
масс.
Подставив
выражение
в
![]() ,
получим:
,
получим:
![]()
![]() .
(1)
.
(1)
Т.е. центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и на которую действует сила, равная геометрической сумме всех внешних сил, приложенных к системе. Выражение (1) представляет собой закон движения центра масс.
В соответствии с формулой из закона сохранения энергии вытекает, что центр масс замкнутой системы либо движется прямолинейно и равномерно, либо остаётся неподвижным.
5 Работа переменной силы.
Рассмотрим материальную точку, движущуюся под действием силы Р по прямой. Если действующая сила постоянна и направлена вдоль прямой, а перемещение равно s, то, как известно из физики, работа А этой силы равна произведению Ps. Теперь выведем формулу для подсчета работы, совершаемой переменной силой.

Пусть точка движется по оси Ох под действием силы, проекция которой на ось Ох есть функция f от х. При этом мы будем предполагать, что f есть непрерывная функция. Под действием этой силы материальная точка переместилась из точки М (а) в точку М (b) (рис. 1, а). Покажем, что в этом случае работа А подсчитывается по формуле
![]() (1)
(1)
Разобьем
отрезок [а; b] на п отрезков одинаковой
длины
![]() .Это
отрезки [а; x1],
[x1;
x2],...,
[xn-1;b]
(рис. 1,6). Работа силы на всем отрезке
[а; b] равна сумме работ этой силы на
полученных отрезках. Так как f есть
непрерывная функция от x, при достаточно
малом отрезке [а; x1]
работа силы на этом отрезке приблизительно
равна f (а) (x1—а)
(мы пренебрегаем тем, что f на отрезке
меняется). Аналогично работа силы на
втором отрезке [x1;
x2]
приближенно равна f (x1)
(x2
— x1)
и т. д.; работа силы на n-ом отрезке
приближенно равна f (xn-1)(b
— xn-1).
Следовательно, работа силы на всем
отрезке [а; b] приближенно равна:
.Это
отрезки [а; x1],
[x1;
x2],...,
[xn-1;b]
(рис. 1,6). Работа силы на всем отрезке
[а; b] равна сумме работ этой силы на
полученных отрезках. Так как f есть
непрерывная функция от x, при достаточно
малом отрезке [а; x1]
работа силы на этом отрезке приблизительно
равна f (а) (x1—а)
(мы пренебрегаем тем, что f на отрезке
меняется). Аналогично работа силы на
втором отрезке [x1;
x2]
приближенно равна f (x1)
(x2
— x1)
и т. д.; работа силы на n-ом отрезке
приближенно равна f (xn-1)(b
— xn-1).
Следовательно, работа силы на всем
отрезке [а; b] приближенно равна:
и точность приближенного равенства тем выше, чем короче отрезки, на которые разбит отрезок [а;b] Естественно, что это приближенное равенство переходит в точное, если считать, что n→∞:
![]()
Поскольку An при n →∞ стремится к интегралу рассматриваемой функции от а до b, формула (1) выведена.
Кинетическая энергия вращю тела. Закон сохранения энергии. Закон
сохранения момента импульса.
Кинетическая
энергия вращ тела.

Закон сохранения энергии: в системе тел, между которыми действуют только
консервативные силы, полная механ энергия сохраняется, т.е. не изменяется во
времени. Eк + Ep = E = const. Энергия превращается из одного вида в другой.
Полная энергия тела- сумма потенциальной и кинетической энергии тела. EK2
+EP2=EK1+EP2.
Потенциальная
энергия
![]() —
скалярная
физическая
величина,
характеризующая способность некоего
тела (или материальной точки) совершать
работу
за счет его нахождения в поле действия
сил. Другое определение: потенциальная
энергия — это функция координат,
являющаяся слагаемым в лагранжиане
системы, и описывающая взаимодействие
элементов системы[1].
Термин «потенциальная энергия» был
введен в XIX веке шотландским
инженером и физиком Уильямом
Ренкином.
—
скалярная
физическая
величина,
характеризующая способность некоего
тела (или материальной точки) совершать
работу
за счет его нахождения в поле действия
сил. Другое определение: потенциальная
энергия — это функция координат,
являющаяся слагаемым в лагранжиане
системы, и описывающая взаимодействие
элементов системы[1].
Термин «потенциальная энергия» был
введен в XIX веке шотландским
инженером и физиком Уильямом
Ренкином.
Единицей измерения энергии в СИ является Джоуль.
Потенциальная энергия принимается равной нулю для некоторой конфигурации тел в пространстве, выбор которой определяется удобством дальнейших вычислений. Процесс выбора данной конфигурации называется нормировкой потенциальной энергии.
Корректное определение потенциальной энергии может быть дано только в поле сил, работа которых зависит только от начального и конечного положения тела, но не от траектории его перемещения. Такие силы называются консервативными.
Также потенциальная энергия является характеристикой взаимодействия нескольких тел или тела и поля.
Любая физическая система стремится к состоянию с наименьшей потенциальной энергией.
Потенциальная энергия упругой деформации характеризует взаимодействие между собой частей тела.
Потенциальная энергия в поле тяготения Земли вблизи поверхности приближённо выражается формулой:
Ep = mgh,
где Ep — потенциальная энергия тела, m — масса тела, g — ускорение свободного падения, h — высота положения центра масс тела над произвольно выбранным нулевым уровнем.