

2.1. Линеаризация вход-состояние
Рассмотрим задачу регулирования применительно к объекту с одним входным сигналом u, описываемому нелинейным уравнением
![]() .
.
Технология линеаризации вход-выход решает эту задачу в два шага:
-
Найти преобразование состояния
![]() и преобразование входного сигнала
и преобразование входного сигнала
![]() такие, что динамика нелинейного объекта
трансформируется в динамику эквивалентного
линейного объекта, описываемого
уравнением
такие, что динамика нелинейного объекта
трансформируется в динамику эквивалентного
линейного объекта, описываемого
уравнением
![]() .
.
- Использовать стандартные методы линейной теории управления, чтобы спроектировать управление uэ.
Пример. Рассмотрим нелинейный объект второго порядка
 (6)
(6)
Даже хотя спроектированный линейный регулятор может стабилизировать объект в малой окрестности точки равновесия (0,0), но совершенно не очевидно, что этот регулятор может стабилизировать его в целом. Специфическая трудность заключена в нелинейности, входящей в первое уравнение состояния (6), т.к. она не может быть сокращена с помощью управляющего сигнала u.
Рассмотрим следующее преобразование состояния
 (7)
(7)
которое преобразует (6) в
 (8)
(8)
Заметим, что новые уравнения состояния также имеют состояние равновесия в точке (0,0). Теперь нелинейности могут быть сокращены с помощью закона управления в виде
 (9)
(9)
где uэ эквивалентное управление (эквивалентное в том смысле, что определение uэ равносильно определению u и наоборот). Этот закон приводит к линейным уравнениям состояния
 (10)
(10)
Итак,
проблема стабилизации исходного
нелинейного объекта, описываемого
уравнениями (6) и использующего исходный
управляющий сигнал u,
с помощью преобразования состояния (7)
и преобразования управления (9) сводится
к проблеме стабилизации преобразованного
объекта, используя новый управляющий
сигнал uэ.
Теперь рассмотрим преобразованный
объект, описываемый уравнениями (10).
Нетрудно показать, что он является не
только линейным, но и полностью
управляемым. Используя хорошо известный
линейный закон управления с обратной
связью по состоянию
![]() ,
и выбирая коэффициенты
,
и выбирая коэффициенты
![]() =2,
=2,
![]() =0,
так что
=0,
так что
![]() ,
(11)
,
(11)
получаем
устойчивый преобразованный объект,
описываемый уравнениями
![]() и
и
![]() .
В рамках исходного вектора состояния
найденный закон управления соответствует
исходному управлению
.
В рамках исходного вектора состояния
найденный закон управления соответствует
исходному управлению
 .
(12)
.
(12)
Исходное состояние x связано с z посредством соотношений
 (13)
(13)
Структурная схема замкнутой системы с полученным выше законом управления представлена на рис. 1.
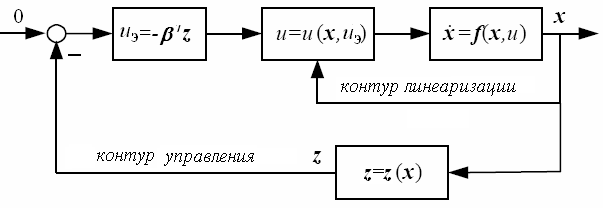
Рис. 1
Замечание. Чтобы обобщить приведенный выше метод нужно ответить на два вопроса:
- Какие классы нелинейных систем могут быть преобразованы в линейные системы?
- Каким путем можно найти соответствующие преобразования для тех систем, которые в принципе могут быть преобразованы в линейные
системы?
2.2. Линеаризация вход-выход
Рассмотрим задачу слежения применительно к объекту управления, описываемому уравнениями
 (14)
(14)
Цель управления: добиться, чтобы выход объекта y(t) отслеживал желаемое задающее воздействие yж(t), в то время как все переменные состояния оставались ограниченными по величине.
Рассмотрим объект третьего порядка, описываемый уравнениями
 (15)
(15)
Для того, чтобы получить соотношение, непосредственно связывающее выход y(t) и управление u(t), сначала найдем производную от выхода
![]() .
.
Как видим, производная явно не связана с управлением u(t). Поэтому еще раз осуществим дифференцирование. Тогда получаем
![]() (16)
(16)
где
![]() (17)
(17)
Ясно, что (16) дает явную зависимость между y(t) и u(t). Если мы выберем управление в виде
 (18)
(18)
где
![]() определяется как
новое управление, то нелинейности в
(16) сокращаются, и мы получаем линейное
динамическое уравнение
определяется как
новое управление, то нелинейности в
(16) сокращаются, и мы получаем линейное
динамическое уравнение
![]()
описывающее двойной интегратор. Проектирование следящего регулятора для такого двойного интегратора не представляет трудностей, если использовать методы линейной теории управления. Например, пусть e(t)=yж(t)- y(t) и мы выбрали новое управление как
![]() (19)
(19)
где
и
![]() положительные
постоянные. При этом ошибка слежения
замкнутой системы управления будет
описываться уравнением
положительные
постоянные. При этом ошибка слежения
замкнутой системы управления будет
описываться уравнением
![]() (20)
(20)
которому соответствует применительно к e асимптотически устойчивая динамика, так что ошибка слежения с течением времени затухает до нуля.
Если
желаемое задающее воздействие yж(t)
представлено
постоянным сигналом v(t)=
v0
=const,
то закон управления
![]() приводит к следующему уравнению
замкнутой системы относительно выхода
приводит к следующему уравнению
замкнутой системы относительно выхода
![]() которое обеспечивает при положительных
постоянных коэффициентов
и
нулевую установившуюся ошибку
воспроизведения постоянного задающего
воздействия.
которое обеспечивает при положительных
постоянных коэффициентов
и
нулевую установившуюся ошибку
воспроизведения постоянного задающего
воздействия.
Метод линеаризации с обратной связью требует точной модели ОУ с точными производными управляемой величины y=x, что может повлечь за собой проблему робастности. К этому случаю имеется подход к решению задачи робастности, который заключается во введении в закон управления с обратной связью по состоянию интеграла от ошибки
![]() ..
..
Отсюда получаем
![]()
или после дифференцирования
![]() .
.
Характеристическое уравнение этой системы определяется выражением
![]()
Выбирая
коэффициенты данного уравнения так,
чтобы все его корни были левыми, мы
можем добиться стабилизации системы
на уровне
![]() =const
и в то же время робастности к постоянному
возмущению на входе нелинейного ОУ и к
неопределенности параметров модели.
=const
и в то же время робастности к постоянному
возмущению на входе нелинейного ОУ и к
неопределенности параметров модели.
Заметим, что:
-
Закон управления (18) определен всюду,
кроме особой точки
![]() =-1.
=-1.
- Для реализации закона управления требуется измерение всех переменных состояния.
- Данный выше регулятор не гарантирует устойчивости внутренней динамики замкнутой системы, т.е. не гарантирует, что замкнутая система внутренне устойчивая.