

3. 26. Аналитический метод синтеза (метод размещения полюсов и нулей системы), основанный на моделях типа "вход-выход"
Основная проблема синтеза цифровой САУ заключается в определении закона управления, обеспечивающего соответствующие требования к статическим и динамическим свойствам замкнутой системы. Как правило, эти требования формулируются заданием соответствующих ограничений на характер переходного процесса (введением допустимых значений перерегулирования, времени переходного процесса, установившейся ошибки при типовых входных воздействиях и т.п.). В методических указаниях к курсовой работе по ТАУ (2291) дана методика определения желаемой передаточной функции цифровой САУ, гарантирующей решение проблемы синтеза с точки зрения заданной точности воспроизведения задающего воздействия и допустимого поведения проектируемой системы в переходном режиме. В сущности, выбор желаемой передаточной функции является фиксацией (размещением) на плоскости Z полюсов и нулей системы, удовлетворяющей предъявляемым к ней требованиям. Нули и полюсы объекта, управляемого от ЦВМ, разумеется, отличаются от нулей и полюсов желаемой передаточной функции. Поэтому надо определить такой закон управления, который как бы заменял нули и полюсы объекта управления на желаемые нули и полюсы.
В рассматриваемом случае задача аналитического синтеза ставится следующим образом.
Исходные данные
1. Считается известной передаточная функция объекта, управляемого от ЦВМ, другими словами, дискретная передаточная функция объекта управления
 ,
(95)
,
(95)
где
степень
![]() многочлена
многочлена
![]() меньше
степени
меньше
степени
![]() многочлена
многочлена
![]() .
Кроме того, предположим, что многочлены
и
не имеют общих
сомножителей, и что многочлен
является приведенным,
т.е. коэффициент при старшем члене равен
единице. Для упрощения записи многочлены
от z
будем обозначать без звездочки. Способ
определения передаточной функции
.
Кроме того, предположим, что многочлены
и
не имеют общих
сомножителей, и что многочлен
является приведенным,
т.е. коэффициент при старшем члене равен
единице. Для упрощения записи многочлены
от z
будем обозначать без звездочки. Способ
определения передаточной функции
![]() по передаточной функции
по передаточной функции
![]() непрерывного объекта был описан ранее
(см. формулу (30)).
непрерывного объекта был описан ранее
(см. формулу (30)).
2. Задана также желаемая передаточная функция
 ,
(96)
,
(96)
связывающая
выход
![]() устойчивой желаемой системы с задающей
последовательностью v[i],
причем
устойчивой желаемой системы с задающей
последовательностью v[i],
причем
![]() =
=![]() ,
,
так что в установившемся режиме постоянная единичная задающая последовательность воспроизводится точно. Для упрощения записи многочлены от z будем обозначать без звездочки. Методика выбора ПФ желаемой системы приведена на с.22 методических указаний 2291.
В
рассматриваемом методе возмущения, к
которым относят возмущающее воздействие
f[i],
приведенное к входу объекта, шум измерений
s[i],
неопределенность и изменение передаточной
функции объекта управления (ошибки
моделирования) учитываются косвенно
путем введения ограничений на многочлен
наблюдателя
![]() ,
о котором будет сказано ниже, а также
путем введения допустимого управления.
При этом прежде всего, надо решить вопрос
о форме закона управления. Здесь возможны
варианты, например закон управления по
ошибке, комбинация закона по ошибке с
внутренней (местной) обратной связью и
т.п.
,
о котором будет сказано ниже, а также
путем введения допустимого управления.
При этом прежде всего, надо решить вопрос
о форме закона управления. Здесь возможны
варианты, например закон управления по
ошибке, комбинация закона по ошибке с
внутренней (местной) обратной связью и
т.п.
3. Ограничимся рассмотрением закона управления, который в изображениях имеет вид
![]() ,
(97)
,
(97)
где, как и прежде [см. рис. 27 и формулы (61) и (62)], передаточные функции
 ,
,
определяют свойства управляющего устройства.
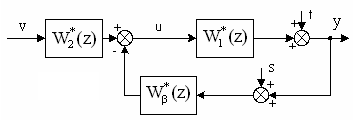
Рис. 27
4.Задаются условия допустимости управления:
а) физическая осуществимость. Условия
![]() ,
(98)
,
(98)
гарантируют,
что алгоритмы управления, определяемые
передаточными функциями
![]() и
и
![]() ,
физически осуществимы;
,
физически осуществимы;
б) возмущения f и s и изменение параметров объекта управления. Передаточная функция обратной связи является допустимой, если она позволяет в достаточной степени ослабить влияние на управляемую величину возмущающего воздействия f, шума измерения s, а также неточности задания или изменения в процессе работы математической модели объекта управления. Закон управления, обеспечивающий качественное поведение системы при изменениях параметров объекта, приводит к робастному управляющему устройству (от английского слова "robust", что означает крепкий, сильный, грубый).
Вводя в функцию дискретный интегратор, т.е. выбирая знаменатель этой функции в виде
![]()
так
что ПФ по возмущению Ф(1)=0,
можно исключить влияние постоянного
возмущающего воздействия на управляемую
величину в установившемся режиме. При
этом отклонение управляемой величины,
вызванное низкочастотным возмущением,
будет также небольшим, так как значения
амплитудно-частотной характеристики
обратной связи
![]() на этих частотах будут велики. Кроме
того, введение интегратора обеспечивает
малую чувствительность (робастность)
проектируемой системы к неопределенности
и изменениям передаточной функции
объекта управления, влияющим на
прохождение низкочастотных сигналов.
Высокочастотные возмущающие воздействия
подавляются самим объектом управления,
являющимся, как правило, с точки зрения
его частотных свойств фильтром низких
частот.
на этих частотах будут велики. Кроме
того, введение интегратора обеспечивает
малую чувствительность (робастность)
проектируемой системы к неопределенности
и изменениям передаточной функции
объекта управления, влияющим на
прохождение низкочастотных сигналов.
Высокочастотные возмущающие воздействия
подавляются самим объектом управления,
являющимся, как правило, с точки зрения
его частотных свойств фильтром низких
частот.
Влияние
высокочастотных шумов измерений на
управляемую величину можно ослабить,
если выбрать
так, чтобы амплитудно-частотная
характеристика разомкнутого контура
![]() быстро спадала с увеличением частоты.
В области высоких частот АЧХ, связывающая
управляющий сигнал и шум измерения,
быстро спадала с увеличением частоты.
В области высоких частот АЧХ, связывающая
управляющий сигнал и шум измерения,
![]() =
=
![]() .
.
Поэтому в плане предотвращения больших значений управляющего сигнала, обусловленных шумом измерения, надо обеспечить приемлемые значения АЧХ обратной связи на высоких частотах.