

2.4.1.1. Построение переходных процессов и ачх по имитационной модели
Основой моделирования АСР является представление её типовых звеньев в виде дискретных (цифровых) моделей на основе разностных уравнений. Программа для построения переходных процессов по имитационной модели приведена в ПРИЛОЖЕНИИ 2.
Для составления программы расчёта переходных процессов в АСР удобно представить её структуру в виде графа, дуги которого описываются уравнениями элементарных типовых звеньев (рис. 2.16).
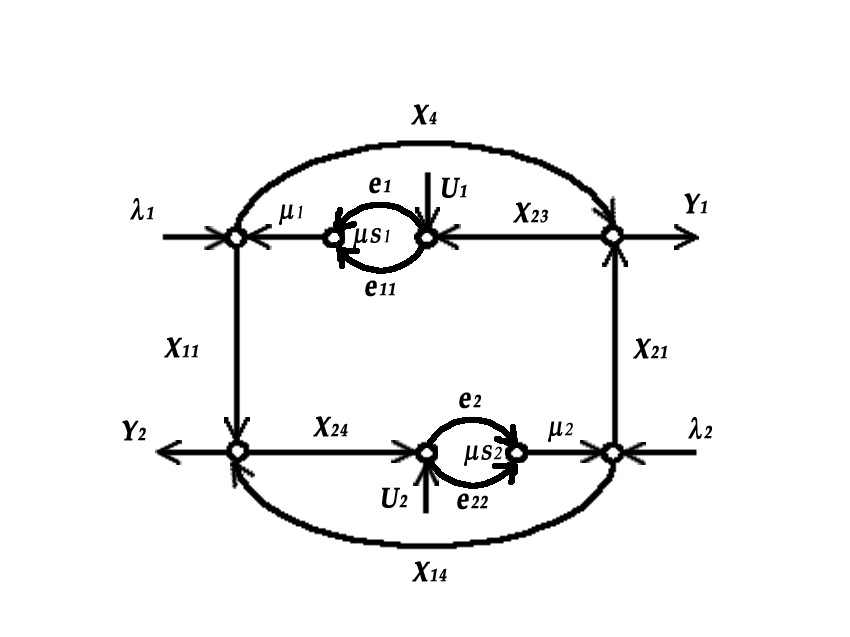
Рис.2.16. Граф предлагаемой АСР с 2мя ПИ регуляторами (цифровая модель)
Полученные переходные процессы изображены на рисунке 2.17.

Рис.2.17. Переходные процессы по каналам управляющего и регулирующего воздействий
Программы для расчёта АЧХ по каналам Y1 и Y2 приведены в ПРИЛОЖЕНИИ 3.
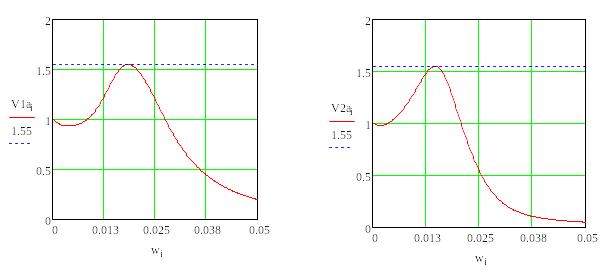
Полученные АЧХ по обоим каналам приведены на рис. 2.18.
а б
Рис.2.18. АЧХ по каналу регулирования давления(а), температуры (б).
2.4.1.2. Оценка качества регулирования по модульному и интегральному показателям качества (рис. 2.19).
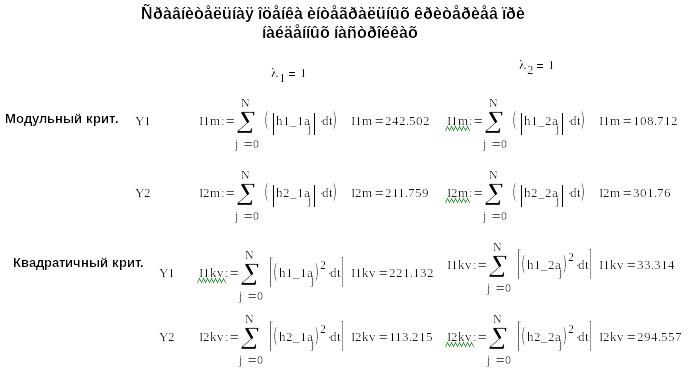
Рис.2.19. Оценка качества регулирования при возмущении по каналам управляющих воздействий.
2.4.2 Расчёт настроек аср численным методом с использованием эволюционного алгоритма “Optim-mga” ( индивидуальное задание)
2.4.2.1 Краткое описание алгоритма и его реализация в среде MathCad
Предлагаемый алгоритм содержит в себе генетические качества статистической селекции популяции поисковых точек. Для исключения “неудачных” потомков в МГА реализована процедура регулярного поиска локальных экстремумов с использованием операций деформируемого многогранника. При смене поколений в алгоритме заложена рекомендуемая во многих источниках 10-процентная замена неперспективных особей (элиминирование).
В ПРИЛОЖЕНИИ 4 приведена факсимильная копия программы МГА для Mathcad, в которой реализованы процедуры статистического задания особей в популяции, сортировки и элиминирования неперспективных особей, вероятностной селекции группы особей для начала регулярного поиска локальных экстремумов, операций регулярного поиска локальных экстремумов, а также процедур завершения работы алгоритма. В представленной программе решается задача поиска глобального экстремума функции.
Для иллюстрации работы МГА на рис. 2.20 показаны четыре поверхности отклика функции на которых показано множество особей (координатных точек) в процессе эволюции поколений. Звездочкой отмечена точка глобального экстремума. На рис. 2.20 а показан начальный разброс точек в первом поколении. В популяции тридцать особей. В каждом поколении удалялись по три наихудших особи. На замену им находились точки в локальных экстремумах. Расположение точек популяции в десятом и в пятнадцатом поколении представлены соответственно на рис. 2.20 б и 2.20 в. Состояние решенной задачи, когда все точки стянулись в одну точку глобального экстремума, представлено на рис 2.20 г. Для получения окончательного решения потребовалось несколько поколений.
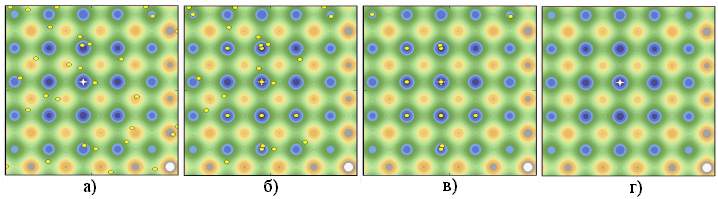
Рис. 2.20. Иллюстрация эволюции популяции от поколения к поколению в процессе работы МГА
2.4.2.1 Расчёт настроек численным методом и анализ переходных процессов
Расчёт настроек приведён в ПРИЛОЖЕНИИ 5. По этим настройкам построим переходные процессы по основным каналам регулирования и сравним их, с процессами полученными, в результате расчёта настроек аналитическим методом ( методом итераций). Аналогично совместим АЧХ по обоим каналам регулирования (рис.2.21).
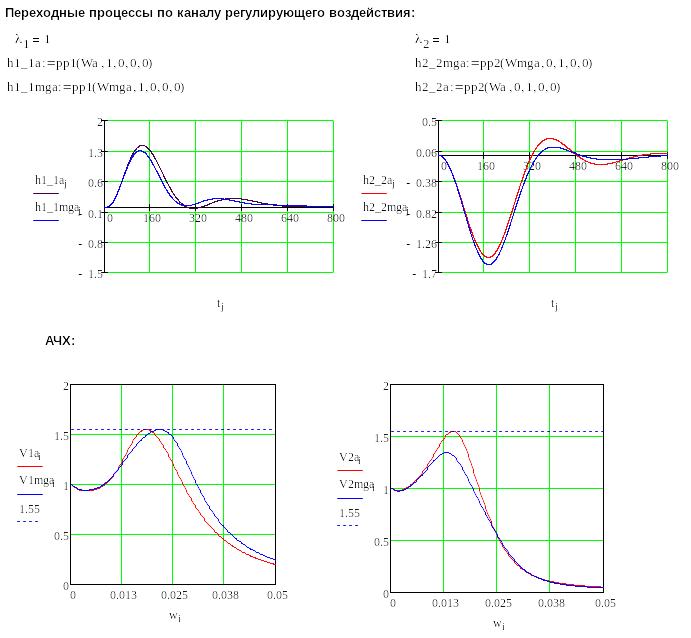
Рис. 2.21. Переходные процессы и АЧХ при λ1=1 и λ2=1.
a-аналитический метод, mga- численный метод поиска настроек.
Произведём сравнительную оценку суммарных интегральных модульных критериев для обоих вариантов настроек, и убедимся что интегральный модульный критерий, рассчитанный при настройках MGA, меньше чем при настройках, рассчитанных итерационным методом как при λ1=1 так и при λ2=1 (рис.2.22).
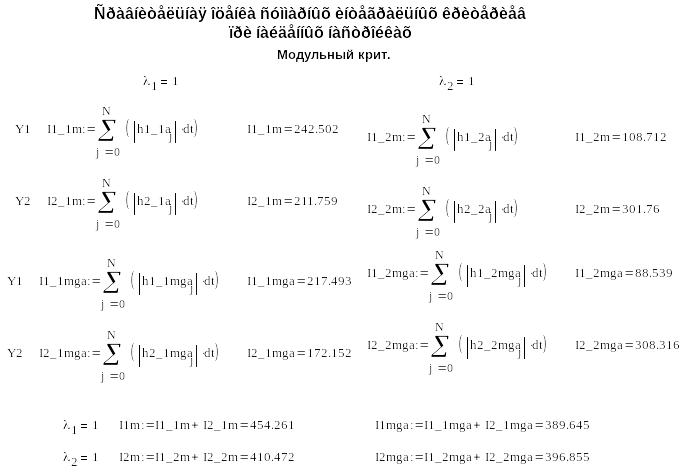
Рис. 2.22. Сравнительная оценка суммарных интегральных критериев.
a-аналитический метод, mga- численный метод поиска настроек.