

2 Нахождение передаточной функции разомкнутой системы
Для нахождения передаточной функции разомкнутой САУ необходимо разорвать обратную связь.

Рисунок 2.1 – Разрыв обратной связи
Тогда искомая передаточная функция разомкнутой системы будет равна:


После упрощения в программе MathCAD передаточная функция примет вид:

Построим график переходной характеристики в программе MatLab и выполним проверку в пакете MathCAD. Скрипт программы MathCAD представлен на рисунке 2.3.

Рисунок 2.2 – Переходная характеристика разомкнутой САУ в пакете MatLab

Рисунок 2.3 – Скрипт MathCAD переходной функции разомкнутой САУ

Рисунок 2.4 – Переходная характеристика разомкнутой САУ в пакете MathCAD
3 Построение асимптотической лачх, лфчх и афх разомкнутой системы
Для построения ЛАЧХ, ЛФЧХ и АФХ разомкнутой САУ запишем выражения для:
а) комплексного коэффициента усиления:

б) амплитудно–частотной характеристики:

в) фазо–частотной характеристики:

г) логарифмической амплитудно-частотной характеристики:

Асимптотическая ЛАЧХ и соответствующая ей ЛФЧХ построены с помощью функции Bode системы Matlab, в виде диаграммы Боде.
Модель в виде структурной схемы в SIMULINK является более простым и наглядным представлением системы, чем в виде передаточных функций в toolbox CONTROL SYSTEM. В тоже время toolbox CONTROL SYSTEM представляет широкие возможности по анализу САУ.
Для преобразования структурной схемы SIMULINK в модель CONTROL SYSTEM необходимо отключить задающее воздействие, а к входу системы подключить входной порт, к выходу – выходной порт (блоки In, Out), разорвать главную обратную связь при анализе устойчивости.

Рисунок 3.1 – Структурная схема разомкнутой САУ
С использованием функции linmod получается описание модели в пространстве состояний с помощью матриц состояния A, B, C, D. В качестве параметра функции linmod указывается имя модели.
Для преобразования матриц состояния в модель CONTROL SYSTEM используем функцию ss. Параметрами функции ss являются матрицы состояния, sys – имя получаемой модели.
>> [A,B,C,D]=linmod('tay1')
Warning: Unconnected output line found on 'tay1/Xвх7' (output port: 1)
> In dlinmod at 202
In linmod at 60
Warning: Using a default value of 0.2 for maximum step size. The simulation step size will be equal to or less than this value. You can disable this diagnostic by setting 'Automatic solver parameter selection' diagnostic to 'none' in
the Diagnostics page of the configuration parameters dialog
> In dlinmod at 202
In linmod at 60
A =
-0.6000 -0.1300 -0.0120 -0.0004 0 0
1.0000 0 0 0 0 0
0 1.0000 0 0 0 0
0 0 1.0000 0 0 0
0 0 0 1.0000 0 0
0 0 0 0 1.0000 0
B =
1
0
0
0
0
0
C =
0 0 -0.0300 -0.0475 -0.0087 -0.0003
D =
0
>> sys=ss(A,B,C,D)
sys =
a =
x1 x2 x3 x4 x5 x6
x1 -0.6 -0.13 -0.012 -0.0004 0 0
x2 1 0 0 0 0 0
x3 0 1 0 0 0 0
x4 0 0 1 0 0 0
x5 0 0 0 1 0 0
x6 0 0 0 0 1 0
b =
u1
x1 1
x2 0
x3 0
x4 0
x5 0
x6 0
c =
x1 x2 x3 x4 x5 x6
y1 0 0 -0.03 -0.0475 -0.0087 -0.00032
d =
u1
y1 0
Continuous-time state-space model.
>> bode(sys);grid

Рисунок 3.2 – ЛАЧХ и ЛФЧХ разомкнутой САУ
Выполним проверку в пакете MathCAD. Скрипт построения ЛАЧХ, ЛФЧХ и АФХ представлен на рисунках 3.3-3.4.

Рисунок 3.3 – Скрипт MathCAD. Задание передаточной функции разомкнутой САУ и выделение мнимой и действительной частей.
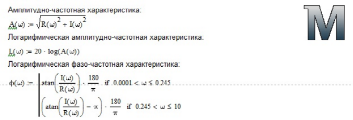
Рисунок 3.4 – Скрипт MathCAD. Формулы АЧХ, ЛАЧХ и ЛФЧХ

Рисунок 3.5 – ЛАЧХ разомкнутой САУ, построенная в пакете MathCAD
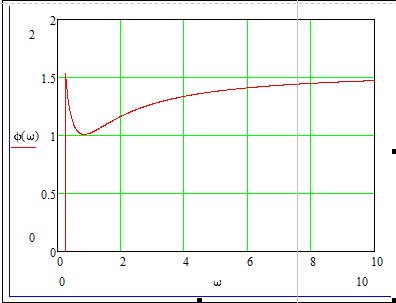
Рисунок 3.6 – ЛФЧХ разомкнутой САУ, построенная в пакете MathCAD
Определение динамических свойств элементарных звеньев производится по амплитудно-фазовой характеристике (АФХ):
W(jω) = R(ω) + jΙm(ω) = A(ω)ejφ(ω) , (3.1)
где R(ω) – вещественная часть амплитудно-фазовой характеристики (ВЧХ);
Ι(ω) – мнимая часть амплитудно-фазовой характеристики (МЧХ);
A(ω) – амплитудная характеристика;
φ(ω) – фазовая характеристика.
Амплитудно-фазовую характеристику можно построить в прямоугольной системе координат по значениям R(ω) и Ιm(ω). Для этого для каждого значения ω определяется R(ω) и откладывается по оси абсцисс, затем определяется Ιm(ω) и откладывается по оси ординат. Полученные точки с координатами (R(ω); Ιm(ω)) соединяются плавной кривой, которая и будет АФХ.
Построить АФХ можно в полярных координатах по значению φ(ω) и A(ω). Для этого для каждого значения частоты ω определяется угол сдвига фаз φ(ω) и откладывается от вектора R(ω). Затем определяется A(ω) и откладывается на луче с заданным φ(ω). Полученные точки соединяются плавной кривой, которая и будет АФХ.
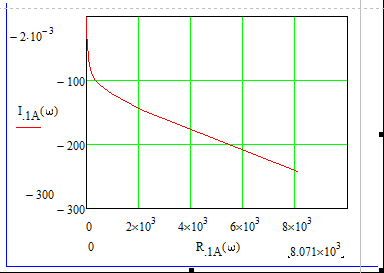
Рисунок 3.7 – АФХ разомкнутой САУ в MathCAD
Для построения АФХ в программе MatLab используем функцию nyquist:
>> [A,B,C,D]=linmod('tay1')
Warning: Unconnected output line found on 'tay1/Xвх7' (output port: 1)
> In dlinmod at 202
In linmod at 60
Warning: Using a default value of 0.2 for maximum step size. The simulation step size will be equal to or less than
this value. You can disable this diagnostic by setting 'Automatic solver parameter selection' diagnostic to 'none' in
the Diagnostics page of the configuration parameters dialog
> In dlinmod at 202
In linmod at 60
A =
-0.6000 -0.1300 -0.0120 -0.0004 0 0
1.0000 0 0 0 0 0
0 1.0000 0 0 0 0
0 0 1.0000 0 0 0
0 0 0 1.0000 0 0
0 0 0 0 1.0000 0
B =
1
0
0
0
0
0
C =
0 0 -0.0300 -0.0475 -0.0087 -0.0003
D =
0
>> sys=ss(A,B,C,D)
sys =
a =
x1 x2 x3 x4 x5 x6
x1 -0.6 -0.13 -0.012 -0.0004 0 0
x2 1 0 0 0 0 0
x3 0 1 0 0 0 0
x4 0 0 1 0 0 0
x5 0 0 0 1 0 0
x6 0 0 0 0 1 0
b =
u1
x1 1
x2 0
x3 0
x4 0
x5 0
x6 0
c =
x1 x2 x3 x4 x5 x6
y1 0 0 -0.03 -0.0475 -0.0087 -0.00032
d =
u1
y1 0
Continuous-time state-space model.
>> nyquist(sys);grid

Рисунок 3.8 – АФХ разомкнутой САУ в MatLab