

1) Теоретическая механика – наука о механическом движении и взаимодействии мат. тел.
2)Механическое движение – относительное перемещение материальных тел в пространстве с течением времени.
3)Механическим воздействием – это действие материальных тел друг на друга в результате, которого происходит изменения их расположения или кинематического состояния.
4)Теоретическая механика сост. из 3 разделов: статика кинематика и динамика.
5)Статика – раздел т.м. изуч. общее учение о силах и усл. равновесия тел под действием сил.
6)Кинематика-раздел т.м. изуч мех жвижение мат тел без учета сил
7)Динамика-раздел т.м изуч движение мат тел под действием сил
8)Под равновесием в статике понимается сост. покоя или равномерного прямолинейного движения.
9)Задачи статики: 1)замена данной сист. Сил ей эквивалентной (упращение сист. Сил); 2) Вывод уравнения равновесия.
10)Абсолютно твердое тело – тело расстояние между 2-мя любыми точками которого не изменяется при его движение.
11) Материальная точка - материальное тело, размерами которого в данных конкретных условиях можно пренебречь.
12) Система материальных точек – совокупность материальных точек, положение и движение которых взаимосвязано.
13) Сила – количественная мера механически взаимодействующих материальных тел.
14) Факторы опред. силы действ. на точку: модулем, точкой приложения, линией действия силы.
15)Система сил – совокупность нескольких сил действующих на тело.
16)Равнодействующая сила – сила эквивалентная системе сил.
17)Уравновешивающая сила – сила равная по величине равнодействующей и направленная по её линии действия в противоположную сторону.
18)Сходство и различие (между равнод. и уравн.): равны по величине противоположны по направлению.
19)Эквивалентные сист. сил – если каждый из них действуя отдельно может сообщить покоющемуся телу одно и то же движение.
20)Эквивалентная сист сил-система сил,оказывающая на тело одинаковое действие
21)Взаимноуравновешивающая система сил - система сил, которая будучи приложенной к телу не изменяет его состояние.
22)двух сил,присоеденения,паралелограма,равенства действия и противодействия,отвердевания
23) Сущность аксиомы 2 сил: тело находится в равновесии, когда эти силы равны по величине, направлены по одной прямой в противоположные стороны.
24)Третья аксиома (Аксиома присоединения, отбрасывания): Если к действующей на тело системе сил присоединить (отбросить) взаимно уравновешаннаю систему сил, то состояние тела не измениться.
25) Сущность аксиомы параллелограмма: Две силы приложенные в 1-ой точке эквивалентны 1-ой силе приложенной в той же точке равноденствия, равной диагонали паралелограма построенной на этих силах как на сторонах.
26) Сущность аксиомы равенства действия и противодействия: Два тела взаимодействуют с силами равными по модулю и направленные по 1-ой прямой в противоположные стороны. 27) Сущность аксиомы отвердивания: Равновесие деформированного тела не изменяет его при отвердевании.
28) Сущность аксиомы связей: – всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие реакциями этих связей.
29)В том что должны направляться по 1 прямой (см пункт26)
30)Свободное тело – тело перемещение кот. в пространстве не ограничено другими телами..
Несвободное тело – тело перемещение кот. ограничено другими телами. 31)Связь – все то, что ограничивает перемещения данного тела в пространстве.
32)Реакцией связи – сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям. Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу.
33) Сила, с которой связь действует на рассматриваемое тело,
препятствуя его перемещению в том или ином направлении, называется
реакцией связи. Активная сила. любая сила, действующая на данной объект.
34)Основные типы связей: гладкая поверхность; гибкая связь; цилиндрический шарнир; сферический шарнир и подпятник; однородный тонкий невесомый стержень; жёсткая заделка.
35) Внешние силы – силы, действующие на частицы данного тела со стороны других материальных тел.
Внутренние силы – силы, с которыми частицы данного тела действуют друг на друга.
!36) абсолютно гладкая плоскость(поверхность)
ребро угла(ступенька)
гибкая связь
невесомый стержень
шарнирно-подвижная опора
шарнирно-неподвижная опора !37)также как и 36 38)жёсткая заделка
39)сферический шарнир, подпятник.
40)цилиндрический шарнир, гибкая связь(нить).
41)
42)
43)нить или опоры
44.система сил линии действия кот. пересекаются в одной точке.
45.пространственая и плоскостная
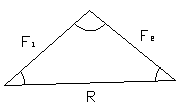
46.если свободное твердое тело находится в равновесии под действием трех непараллельных сил лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке.
47. если свободное твердое тело находится в равновесии под действием трех непараллельных сил лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке.
48. графический сп: по правилу параллелограмма

R=F1+F2
Графоаналитический
сп: ![]()
 .
.
Аналитический сп: Rx=F1x+F2x; Ry=F1y+F2y
R
=![]()
![]()
![]()
49. графический, графоаналитический, аналитический.
50. Равнодействующая сходящейся системы сил при графическом определении является замыкающей стороной силового многоугольника, построенного на этих силах как на сторонах.
51. Замкнутость силового многоугольника, т.е. начало первой и конец второй совпадают.
52. Суммы проекций всех сил системы на оси координат должны быть равны нулю.
53.
R=
![]() = 0 ;
= 0 ; ![]() =0;
=0;
![]() =0;
=0;![]() =0
=0
54.
R=
![]() = 0 ;
=0;
=0;
= 0 ;
=0;
=0;
55. сумме этих сил
56. R=![]() Rx=
Rx=![]() Ry=
Ry=![]() R=
R=
57.R=![]() Rx=
Rx=![]() Ry=
Rz=
Ry=
Rz=![]() R=
R=![]()
58. равнодействующая перпендикулярна этой оси.
59. силовой многоугольник замкнут.
60. тело находится в равновесии.
61. жесткая конструкция из прямолинейных стержней, соединенных на концах шарнирами.
62Верхний пояс-стержни верхнего контура фермы.Нижний пояс анал верх.Стойки-верт стержни обрешетки.Раскосы-наклоные стержни обрешетки. Узел-точка соед нескольких стержней шарниров.Опорный узел-узел фермы, устанавливаемый на опору. Пролет фермы – расстояние между опорнми узлами
63. k =2n -3, k- число стержней, n- число узлов.
64. определить опорные реакции и усилия в ее стержнях.
65вырезания узлов .сквозных сечений.Максвела-крамона.возможных перемещений
66.после опр опорных реакций последовательно вырезайем узлы фермы и расм их равновесия начиная с того узла где ни более 2-ух перерезанных неизв стержней..
67. ферму разделяем на две части сечением, проходящим через три стержня, в которых (или в одном из которых) требуется определить усилие, и рассматривают равновесие одной из этих частей. Действие отброшенной части заменяют соответствующими силами, направляя их вдоль разрезанных стержней от узлов, т.е. считая стержни растянутыми. Затем составляют уравнения равновесия, беря центры моментов так, чтобы в каждое уравнение вошло только одно неизвестное усилие.
68. стропильная, крановая, мостовая.
69. «+» «-» многоугольники при графическом решении растекаются по листу; точность построения теряется от листа к листу; при графическом построении каждую силу приходится откладывать дважды; при аналитическом расчете накопление ошибок.
70. Достатки-независимые определения усилий в стержнях фермы.
71. система двух ІІ, равных по модулю и противоположных по направлению сил.
72. вращательное действие
73.Одной-нет
74. количественная характеристика действия пары сил на тело, численно равный произведению модуля одной из сил пары на плечо пары, взятый со знаком «+» или «-». Св-ва: не изменяется при переносе сил пары по линиям их действия; равен «0», если плечо пары =0; равен площади ВСАD или 2×пл.ВАС или 2×пл.ВАD.
75. не имеет
76. парой сил, стремящейся вращать тело в противоположном направлении данному.
77.вектор численно равный произведению модуля одной из сил пары на плечо пары направлен перпендикулярно к плоскости действия пары сил в ту сторону чтобы глядя с конца вектора пара сил была видна стремящаяся вращать тело против хода часовой стрелки произведение одной из сил пары на плечо пары
78.в плоскости эквивалентны пары сил имеющие одинаковые алгебраические моменты
79.могут если векторный момент пары сил равен геометрической сумме векторных моментов слогаемых пар
!80.они равны и направлены в одну сторону
81.не изменится
82Алгебраическим моментом силы F
относительно точки О называется
взятое со знаком «плюс» или «минус» произведение модуля силы на длину
пендикуляра, опущенного из этой точки на линию действия силы
MO(F) = ±Fh
83.можно заменить другой парой сил сохраняя алгебраический момент пары
84любая произвольная пространственная система сил
может быть заменена эквивалентной системой, состоящей из одной си-
лы и одной пары сил:
(F1,F2,...,Fn ) ~ (R ,M0)
85. для равновесия произвольной пространственной си-
стемы сил необходимо и достаточно, чтобы алгебраическая сумма прое-
кций всех сил системы на каждую из трех координатных осей, а также
алгебраические суммы моментов всех сил системы относительно каждой
из этих осей были равны нулю.
![]()
86.геометрическое условие равновесия системы пар сил состоит в замкнутости векторного многоугольника построенного на векторных моментах пар сил как на сторонах. Аналитическое уравнение равновесия системы пар сил в пр-ве ∑Мкх=0 ∑Мку=0 ∑Мкz=0 аналитическое условие: суммы прекций векторных моментов пар сил на оси координат должны быть =0, если пары сил расположены в одной пло-ти,то для равновесия тела необходимо и дастаточно чтобы алгебраическая сумма моментов всех пар сил было=0
87.
88. силу можно переносить ІІ самой себе в любую другую точку тела присоединяя при этом пару сил момент которой равен моменту переносимой силы относительно любого центра.
89. сила равная геометрической сумме всех сил системы.
90.
91. . сложим присоединенные пары, появившиеся при параллель-
ном переносе сил заданной системы в центр приведения О: стр 26
92. При перемене центра приведения он будет
иметь другое значение, поскольку его слагаемые зависят от положенияэтой точки.
93. векторный момент результирующей пары, равный геометрической сумме векторных моментов всех сил системы относительно центра приведения.
94. сложим присоединенные пары, появившиеся при параллель-
ном переносе сил заданной системы в центр приведения О: стр 26
95. При перемене центра приведения он будет
иметь другое значение, поскольку его слагаемые зависят от положенияэтой точки.
96.
97. 1) Система нах. в равнов. записыв. условия равновесия 2)к паре сил момент которой не зависит от центра приведения 3)к одной силе равнодействующей равной главному вектору 4) к одной силе = по величине главн. вектору, но не приложенной в центре приведения
98. Главный вектор - это сумма всех сил в системе. РАВНОДЕЙСТВУЮЩАЯ системы сил, сила, оказывающая на твердое тело такое же механическое действие, как и данная система приложенных к телу сил.
99. 1)∑Fкх=0;∑Fкy=0;∑Fкz=0 2)∑Fкх=0;∑MA(Fк)=0; ∑MB(Fк)=0 3)∑MA(Fк)=0; ∑MB(Fк)=0; ∑MC(Fк)=0
100. Силы системы расположенные произвольным образом в пространстве назыв. произв. пространств. сист. сил.
101.
102. Когда главный вектор=0, а главный момент≠0, то система приводится к паре сил момент которой не зависит от центра приведения
103. 1)∑Fкy=0; ∑MO(Fк)=0 где ось оу параллельна силам 2) ∑MB(Fк)=0;∑MB(Fк)=0 точки А и В не лежат на одной прямой
104. ст.неопр.- когда число неизвестных превышает число возможных уравнений равновесия (ст.опр.-наоборот)
105. тела соединенные между собой шарнирами или соприкасающиеся в результате чего происходит взаимодействие (составные балки)
106. рисунок составной балки с шарниром
107. системы тел для которых имеют место статически неопределенные задачи назыв. сат. неопределимыми сист.
108Если система сил имеет равнодействующую,
то момент равнодействующей относительно какого-либо центра или
оси равен сумме моментов сил системы относительно этих же центра или оси..
109. Главный вектор – сила= геометр сумме всех сил системы
110. опред главн вектора 1)геометрическим построением 2) аналитически(по формулам)
111. Величина и направление главного вектора системы определяются
через его проекции на оси координат: стр 35
112. нет т.к главн вектор не зависит от центра приведения
113. Момент силы относительно оси = алебраич моменту проекции этой силы на плоскость перпенд оси относительно точки пересечения с плоскостью MZ=±Fxy×h
114.Момнт силы относительно оси = проекции на эту ось, векторного момента силы относительно любой точки взятой на этой оси MZ(F)=mo(F)×Cosγ
115. 116. Мом силы относ оси =0: 1)Если сила параллельна оси 2)если линия действия силы пересекает ось
117. М. с. относительно центра О — величина векторная. Его модуль MO=Fh, где F — модуль силы, a h — плечо, т. е. длина перпендикуляра, опущенного из О на линию действия силы (рис.); направлен вектор МO перпендикулярно плоскости, проходящей через центр О и силу ? в сторону, откуда поворот, вызываемый силой, виден против хода часовой стрелки (в правой системе координат
М. с. относительно оси — величина алгебраическая, равная проекции на эту ось М. с. относительно любой точки О оси или же численной величине момента проекции Fxy силы F на плоскость ху, перпендикулярную оси z, взятого относительно точки пересечения оси с плоскостью. Т. е. Mz= МOcosg=Fxyh1 или Mz= -Fxyh1.
118. Теорема Вариньона относит оси – момент равнодействующей системы сил относит оси = алгебр сумме моментов всех сил системы относительно той же оси MZ(R)= MZ(Fk)
119.
120.
121.
122. Нет
123.
124. 1)R=0;M=0 в равновесии
2)R=0;M![]() 0
приводится к паре сил
0
приводится к паре сил
3)R 0;M=0 приводится к равнодействующей R, проходящей через центр О, равная главному вектору=> сходящаяся система сил
4)R
0;M
0;R![]() M
приводится к одной равнодействующей,
равной R?
Но не проходящей через О.
M
приводится к одной равнодействующей,
равной R?
Но не проходящей через О.
5) R 0;M 0;R||M приводится к совокупности силы R и пары PP’ лежащей в плоскости, силе(динамический винт); прямая || R-ось динамы
6) R 0;M 0 приводится к динаме, но ось динамы не проходит через 0.
125. Условие и уравнение равновесия произвольной псс- для равновесия произ. псс необходимо и достаточно, что бы суммы проекции всех сил на каждую из трех корд. Осей и суммы их моментов относительно этих осей были равны нулю.
126.
![]()
127. Как
направляется реакция шероховатой
поверхности- реак.
Шер. Повер. Направляется под углом
![]() к поверхности от нормали..
к поверхности от нормали..
128. Составляющие реакции шероховатой поверхности- нормальная реакция N и перпендикулярная к ней сила трения.
129.Угол трения- угол на который отклонена реакция шероховатой поверхности в состоянии предельного равновесия от нормали.
130. Формула макс(предельного) трения Fтр.=f*N
131. От чего зависят Условия коэффициента трения- от матер соприкасающихся поверхностей, от шероховатости, температуры, влажности, и т.д.
132. Условие равновесия тела, на шероховатой поверхности (конус + угол)- для равновесия тела на шероховатой поверхности необходимо и достаточно, чтобы линия действия равнодействующей активных сил, действующих на тело, проходила внутри конуса трения или по его образующей через его вершину.
133.
![]() коэффициент
трения качения-
величина смешения реакции шероховатой
поверхности (нормального давления) от
центра качения в сторону качения. (см.,
м)
коэффициент
трения качения-
величина смешения реакции шероховатой
поверхности (нормального давления) от
центра качения в сторону качения. (см.,
м)
134.
135. Условие
качения fP>Q![]()
![]()
136. Центр
|| сил- точка
приложения равнодействующих
этих сил и
не изменяющая своего положения при
любых поворотах сил относительно точек
их приложения в любую сторону.
![]()
137. Центр тяжести тела- точка неизменно связанная с этим телом через которую проходит равнодействующая сил тяжести частиц этого тела и положение которой не зависит от положения тела в пространстве.
138. формулы координат центра тяжести