

МО РБ
УО «Полоцкий государственный университет»
Кафедра радиоэлектроники курсовая работа По курсу:
“Радиотехнические системы ”
На тему:
”РЛС обнаружения с когерентной обработкой сигнала ”
Разработал: Студент группы 08-РТ
Денисевич С.А.
Проверил: Капралов М.Е.
Новополоцк 2012 г
Содержание
Кафедра радиоэлектроники 1
КУРСОВАЯ РАБОТА 1
По курсу: 1
Новополоцк 2012 г 1
1. Задание на выполнение курсовой работы 4
Вариант 104 4
2. Введение 5
3. Энергетический расчет 6
4. Расчёт тактических параметров РЛС 16
5. Синтез структурной схемы 19
6. Расчет преобразователя частоты. 24
7. Заключение 30
Список литературы 31
Приложение 32
1. Задание на выполнение курсовой работы 3
2. Введение 4
3. Энергетический расчет 6
4. Расчёт тактических параметров РЛС 16
5. Синтез структурной схемы 18
6. Расчет преобразователя частоты. 23
7. Заключение 29
Список литературы 30
Приложение 31
Задание на выполнение курсовой работы Вариант 104
Исходные данные:
Вид обработки сигнала – РЛС обнаружения с когерентной обработкой сигнала;
Максимальна дальность до цели Dмакс = 250 км;
Длина волны несущего колебания λ = 1.2 м;
Вероятность правильного обнаружения D = 0.999;
Вероятность ложной тревоги F = 0.1;
Площадь антенны передатчика помех (антенна направленная) Sапп =10 м2;
 =
=
 – спектральная плотность помехи [Вт/Гц]
на входе приёмника
– спектральная плотность помехи [Вт/Гц]
на входе приёмника
равна спектральной плотности собственного шума приёмника;
Допустимая
импульсная мощность Рдоп =
 ;
;
Вид цели - самолет ;
Выбору подлежат:
коэффициент шума и шумовая температура;
вид и параметры сигнала;
параметры антенной системы: ширина диаграммы направленности,
коэффициент направленного действия, эффективный раскрыв, площадь
антенны и её размеры в плоскостях азимута и угла места;
параметры обзора: время обзора (скорость вращения антенны), время
облучения цели, частота повторения и число импульсов в пачке;
мощность передатчика помех (передатчик расположен на цели);
коэффициент потери энергии.
Необходимо рассчитать:
импульсную, среднюю мощность передатчика РЛС;
уровень порога обнаружения и минимальное отношение сигнал/шум на
входе приёмника;
разрешающую способность РЛС по дальности и азимуту;
среднеквадратичные погрешности по дальности и азимуту;
диапазон однозначного определения дальности.
Введение
Радиотехнические системы – это совокупность радиоэлектронных устройств, которая служит для сбора, передачи или уничтожения информации, либо для управления объектом на расстоянии.
Радиотехнические системы бывают двух видов: информационные и
управляющие. В свою очередь информационные делятся на РТС: передачи информации, уничтожения информации и извлечения информации.
К последним и относятся радиолокационные системы (РЛС) и радионавигационные системы (РНС).
Радиолокация – это область радиотехники, использующая явление отражения и излучения электромагнитных волн различными объектами (целями) для обнаружения, измерения координат и параметров движения этих объектов.
Радиолокация бывает нескольких видов (например, в зависимости от вида цели):
• активный ответ (на борту цели находится приёмник и передатчик);
• пассивный ответ (сигнал станции отражается от цели).
Также радиолокация бывает: полуактивная (используется устройство подсветки) и пассивная (на приёмнике расположена тепловая головка, которая реагирует на цель).
В зависимости от назначения и характера получаемой информации можно выделить три класса РЛС:
• РЛС обзорного типа предназначены для поиска, обнаружения целей и грубой оценки их координат. Они обеспечивают обзор некоторой зоны пространства и получение информации одновременно о многих целях. К ним относятся РЛС обзора земной поверхности, обзора воздушного пространства, морские обзорные РЛС, РЛС кругового обзора.
• РЛС следящего типа предназначены для точного измерения координат целей в системах управления оружием, слежения за самолетами. Примеры РЛС следящего типа — РЛС слежения за угловыми координатами, за дальностью и радиальной скоростью целей.
• Специализированные измерители и РЛС ближнего действия. В общем случае РТС извлечения информации имеет структуру, представленную на (рис. 2).
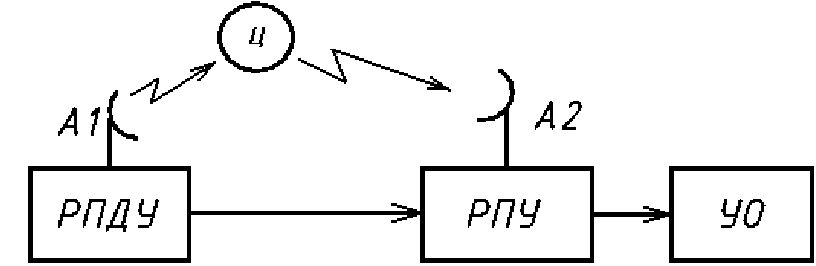
Рис. 2. Структура РТС извлечения информации.
Ц – цель,
РПДУ – радиопередающее устройство, излучающее сигнал в направлении цели,
РПУ – радиоприёмное устройство, принимающее сигнал, отражённый от объекта,
УО – устройство отображения: на основании сравнения зондирующего и отражённого сигналов выдаёт сведения о наличии объекта и его состоянии. В данной курсовой работе необходимо рассчитать РЛС обнаружения с когерентной обработкой сигнала целью для которой является судно.
Разрабатываемая в данной курсовой работе система РЛС обзорного типа, осуществляющая активный метод радиолокации, представлена на (рис. 2.2).

Рис. 2.2. – Разрабатываемая РЛС обзорного типа.
В радиопередающем устройстве (РПДУ) с помощью модулятора (М) формируется последовательность зондирующих импульсов, которые излучаются в направлении цели через антенный переключатель (АПк) и антенну. Отражённый сигнал через АПк поступает на демодулятор (ДМ) радиоприемного устройства (РПУ). Извлечение информации, содержащейся в параметрах принятого сигнала, осуществляется в измерительно-индикаторном устройстве (ИИУ). Синхронизатор (С) с помощью синхроимпульсов обеспечивает определённые временные характеристики зондирующих импульсов.