

Содержание
Введение.……………………………………………………………………………………….………………...……........2
Математическое описание и устройство вентильно-индукторного привода………………………………………………………………………………………..……………………..…..3
Структурная схема вентильно-индукторного привода…..…………………………………...5
Особенности конструкции индукторной машины ..……………………………………..………6
Принцип действия ВИП.…………………………………………………………………………………………9
Математическое описание m-фазного ИД с независимым управлением фазами..…………………………………………………………………………………………..……………………13
Математическое описание 6-фазного ИД с общей точкой………….……………………..16
Модель вентильно-индукторного привода аккумуляторного электровоза.…………20
Электропривод шахтного электровоза на основе использования вентильного двигателя….………………………………………………………………………………………………………………26
Структурная схема привода шахтного электровоза и описание ее функционирования……………………………………………………………………………………….……..26
Математическая модель вентильного электропривода….………………………….……..28
Математическое моделирование вентильно-индукторного двигателя для привода стрелочного перевода……………………….…………………………………………….……..36
Особенности моделирования электрической трансмиссии транспортного средства на примере линейного тягового электрического привода………..….……..42
Заключение……………………………………………………………………………………………………………….…60
Литература…………………………………………………………………………………………………………………..61
Введение
Известными преимуществами индукторных двигателей (ИД) перед асинхронными и синхронными машинами, предназначенными для работы в составе регулируемого электропривода, являются их более высокая надежность, простота и технологичность конструкции (катушки фаз статора разнесены в пространстве, ротор представляет собой пакет шихтованной стали), повышенный КПД и массогабаритные показатели, более низкая стоимость в серийном производстве. К недостаткам этих двигателей обычно относят невозможность работать без полупроводникового преобразователя, наличие пульсаций электромагнитного момента и, как следствие, повышенный шум и вибрация двигателя, а также более высокая стоимость полупроводникового преобразователя в электроприводе эквивалентной выходной мощности. Последнее является следствием относительно невысокого коэффициента преобразования энергии, который представляет собой отношение выходной (активной) и входной (полной) энергии ИД. Известно, что при допущении о не насыщенности магнитной системы ИД этот коэффициент стремится к 0.5. Для насыщенных машин он превышает это значение, однако, в реальных условиях всегда остается значительно меньшим, чем номинальное значение КПД. Это объясняется тем, что по принципу действия машины только часть входной энергии преобразуется в механическую, т.е. идет на создание момента. Остальная ее часть идет на намагничивание машины и за вычетом потерь возвращается в источник питания.
Математическое описание и устройство вентильно-индукторного привода.
Вентильно-индукторный привод (ВИП) — это относительно новый тип электромеханического преобразователя энергии, который сочетает в себе свойства и электрической машины, и интегрированной системы регулируемого электропривода. Как всякий электропривод, он обеспечивает преобразование электроэнергии, которая поступает от питающей сети, в механическую энергию, передаваемую в нагрузку. ВИП дает возможность осуществлять управление этим процессом в соответствии с особенностями конкретной нагрузки: регулировать частоту вращения, момент, мощность. ВИП, способен работать во второй зоне регулирования скорости (скорость выше номинальной) при снижении момента на валу, что является аналогом режима работы частотно-управляемого асинхронного двигателя (АД) с постоянством выходной мощности. Однако, одной из проблем работы ВИП в этом режиме остается значительное увеличение уровня пульсаций электромагнитного момента, что в еще большей степени проявляется при переходе ВИП в генераторный режим работы на скорости, выше номинальной.
В связи с отмеченными особенностями ВИП может эффективно применяться в тех случаях, где его преимущества относительно более распространенных приводов с АД и синхронным двигателем (СД), оказываются наиболее заметными, а именно: в высокоскоростных электроприводах, где двигатели с обмотками и постоянными магнитами на роторе менее надежны; в низкоскоростных электроприводах, где АД неэффективен из-за низкого КПД и СД слишком дорог, а стоимость преобразователя невелика относительно стоимости двигателя; при работе в тяжелых условиях, в частности, при ударных нагрузках на вал двигателя; при работе в условиях, где принципиальным является минимизация массогабаритных показателей привода, в частности в тяговых электроприводах; в регулируемом электроприводе малой мощности, в частности для бытовой техники.
Структурная схема вентильно-индукторного привода.
ВИП представляет собой достаточно сложную электромеханотронную систему, структурная схема которой приведена на рис. 1.1.
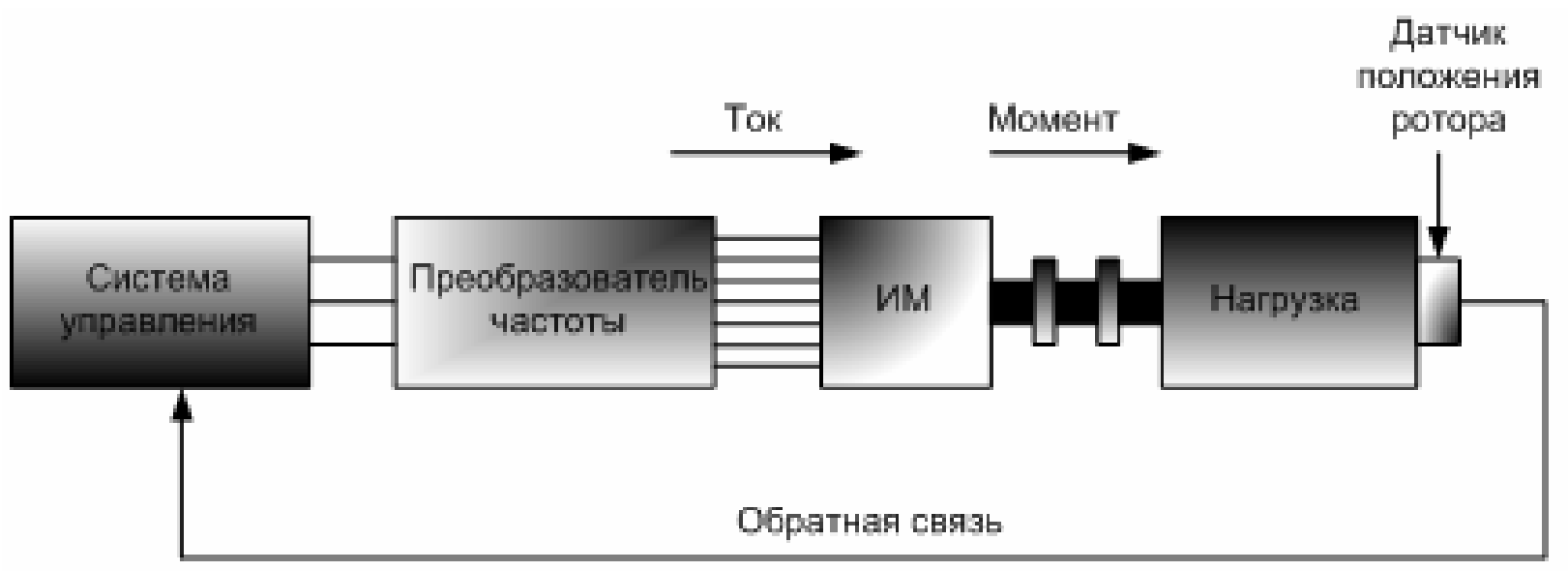
Рис. 1.1 – Структурная схема ВИП
В ее состав входят индукторная машина (ИМ), преобразователь частоты, система управления и датчик положения ротора (ДПР). Функциональное назначение этих элементов ВИП очевидно: преобразователь частоты обеспечивает питание фаз ИМ однополярными импульсами напряжения прямоугольной формы; ИМ осуществляет электромеханическое преобразование энергии, а система управления в соответствии с заложенным в нее алгоритмом и сигналами обратной связи, поступающими от датчика положения ротора, управляет данным процессом.
По своей структуре ВИП ничем не отличается от классической системы регулируемого электропривода. Именно поэтому он и обладает всеми ее свойствами. Однако в отличие от регулируемого электропривода, например с асинхронным двигателем, ИМ в ВИП не является самодостаточной. Это означает, что она принципиально не способна работать без преобразователя частоты и системы управления.
Преобразователь частоты и система управления являются неотъемлемыми частями ИМ, необходимыми для осуществления электромеханического преобразования энергии.
Это дает право утверждать, что совокупность структурных элементов, представленных на рис. 1.1, является не только системой регулируемого электропривода, но и электромеханическим преобразователем энергии.