

Вопрос №34 Исследование компенсаторов наклона в нивелирах.
В нивелирах компенсатор заменяет цилиндрический уровень при зрительной трубе, поэтому работа этого узла подвергается достаточно детальным исследованиям. При исследованиях определяют три главных параметра:
*
диапазон 
 работы
компенсатора;
работы
компенсатора;
* его чувствительность и ошибку компенсации углов наклона;
* время затухания колебаний компенсатора.
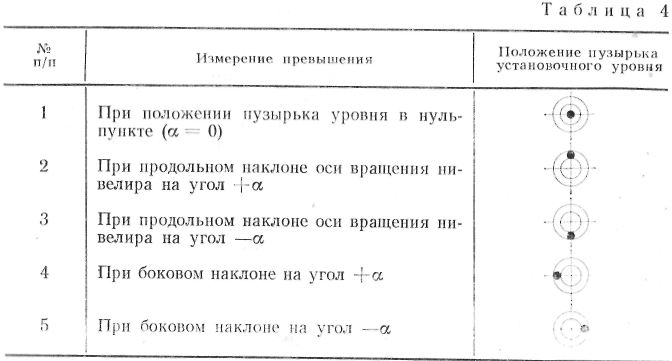
Диапазон действия компенсатора определяют в двух взаимно перпендикулярных направлениях, при продольных и поперечных (боковых) наклонах нивелира в обе стороны от нуль-пункта установочного (круглого) уровня. Исследование выполняют либо с использованием нивелирной рейки (в полевых условиях), либо с помощью экзаменатора (в лабораторных условиях).
В
первом случае (по рейке без экзаменатора)
перед исследованиями подставку
устанавливают так, чтобы один из
подъемных винтов находился под
объективом или окуляром зрительной
трубы, находят угловую величину наклона
трубы нивелира при вращении подъемного
винта на один полный оборот по формуле
β= ρ
, где
ρ
, где —
изменение отсчета по рейке (шкале) при
одном полном обороте винта; L
—
расстояние от оси вращения нивелира до
рейки.
—
изменение отсчета по рейке (шкале) при
одном полном обороте винта; L
—
расстояние от оси вращения нивелира до
рейки.
Затем
начинают производить наклоны прибора
в продольном и боковом направлениях,
фиксируя момент «зависания» маятника
компенсатора (сетка нитей начинает
перемещаться пропорционально наклону)
и величину п
поворота
подъемного винта в долях длины окружности
головки подъемного винта. Угловая
величина диапазона действия компенсатора![]() определится
как
определится
как![]()
Более
точно величину α
определяют
в лабораторных условиях при помощи
экзаменатора с ценой деления шкалы
винта не более 30". По этой схеме момент
зависания маятника фиксируется по
положению освещенной сетки нитей
нивелира, наблюдаемой в трубу
коллиматора. В этом случае значение
экстремального угла наклона определяют
непосредственно по шкале экзаменатора
по формуле
 =γN
, где N
—
число делений лимба экзаменатора;
γ—цена
одного деления лимба экзаменатора.
=γN
, где N
—
число делений лимба экзаменатора;
γ—цена
одного деления лимба экзаменатора.
Ошибки
компенсации углов наклона в полевых
условиях определяют
по превышениям, измеренным на станции
при длине визирного
луча 5, 25, 50 и 100 м для Н-ЗК, Н-10КЛ; 5, 25, 50 и
75 м для Н-05К. Наклон нивелира производят
в продольном и боковом направлениях на
угол![]() равный
номинальному значению диапазона
работы компенсатора. Нивелир во время
измерений должен находиться в створе
между рейками, на равных расстояниях
от них.
равный
номинальному значению диапазона
работы компенсатора. Нивелир во время
измерений должен находиться в створе
между рейками, на равных расстояниях
от них.
Эта программа составляет один прием. Для каждого расстояния должно быть сделано не менее 5 приемов. Между приемами изменяется горизонт нивелира.
Ошибку
компенсации![]() на
одну минуту наклона оси вращения
нивелира вычисляют по формуле
на
одну минуту наклона оси вращения
нивелира вычисляют по формуле
ГДе![]() —
среднее превышение, полученное при
наклоне оси нивелира на угол
—
среднее превышение, полученное при
наклоне оси нивелира на угол![]() —то
же, при положении уровня в нуль-пункте;
L
— длина
визирного луча.
—то
же, при положении уровня в нуль-пункте;
L
— длина
визирного луча.
Вопрос №35 Механические передачи – механизм, служащий для передачи и преобразования механической энергии от энергетической машины до исполнительного механизма (с изменением характера движения).
Существуют:
- цилиндрические
- зубчатые
- червячные
- фрикционные
- конические
- передачи из винта и гайки
- передачи зубчатой рейкой
- шарнир Гука.
Вопрос№36 Типы конструкций вертикальных и горизонтальныз осевых систем. Осевые системы являются основными механическими узлами геодезических приборов. Точность, долговечность и надежность, в особенности угломерных приборов, во многом зависят от этих устройств.
Механические осевые системы определяют взаимное положение оптико-механических узлов геодезического прибора в строгом соответствии с его геометрической конструкцией. По своей форме осевые системы могут быть конические и цилиндрические, а по назначению и расположению — вертикальные и горизонтальные.
 Вертикальные
осевые системы.
Для
обеспечения стабильности
системы, необходимой легкости хода оси
должны быть длинными.
Их длина обычно в 3—4 раза больше диаметра
d
и
выбирается примерно равной l
= 2r,
где
r
—
радиус горизонтального круга (лимба).
Вертикальные
осевые системы.
Для
обеспечения стабильности
системы, необходимой легкости хода оси
должны быть длинными.
Их длина обычно в 3—4 раза больше диаметра
d
и
выбирается примерно равной l
= 2r,
где
r
—
радиус горизонтального круга (лимба).
Вертикальные осевые системы современных угломерных приборов можно классифицировать по виду трения, так как осевая система — это всегда один или несколько подшипников.
По этому признаку различают три вида осевых систем:
1) с трением скольжения;
2) с трением качения
3) комбинированные.
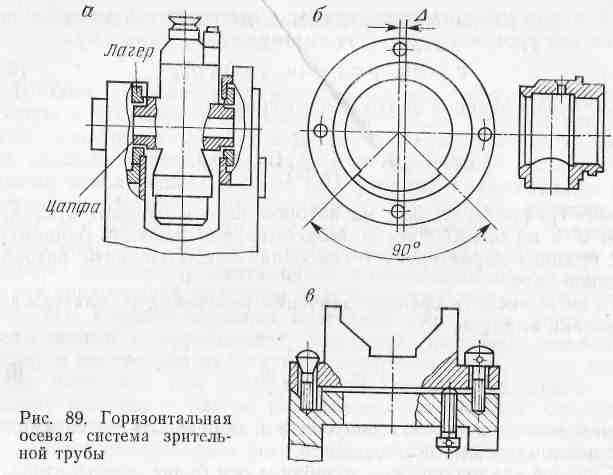
В
большинстве известных систем имеет
место вертикальное разнесение подшипников
и основных связей; в некоторых приборах
принято горизонтальное разнесение.
Среди осевых систем, основанных на
трении скольжения, раньше всего стали
применять конические осевые системы
.Они просты в изготовлении и подгонке
деталей. Основными деталями любой
осевой системы является втулка и ось.
Общий
допуск на наклоны, вызываемые
несовершенством осевой системы,
составляет
![]() где
где
![]() —цена
деления уровня при алидадной части
угломерного прибора. Отдельные допуски,
например, точность изготовления оси
(цапфы) алидады определяются как
—цена
деления уровня при алидадной части
угломерного прибора. Отдельные допуски,
например, точность изготовления оси
(цапфы) алидады определяются как
 где
r
—
радиус горизонтального круга.
где
r
—
радиус горизонтального круга.
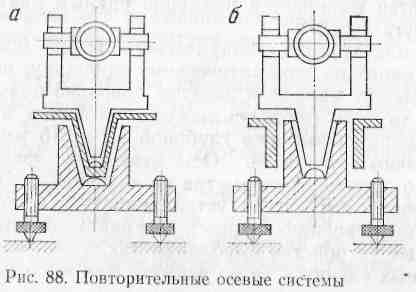 .
Горизонтальные осевые системы. При
расчете на точность горизонтальных
осей исходят из заданной точности
сохранения в пространстве положения
оси вращения зрительной трубы. Ошибка
в измеряемом направлении
.
Горизонтальные осевые системы. При
расчете на точность горизонтальных
осей исходят из заданной точности
сохранения в пространстве положения
оси вращения зрительной трубы. Ошибка
в измеряемом направлении
![]() (6.2)где
(6.2)где![]() —угол
наклона зрительной трубы; i
—
наклон горизонтальной оси. В новых
теодолитах устойчивость горизонтальной
оси достигается,
с одной стороны, конструкцией лагер, а
с другой — конструкцией
наводящего устройства.
—угол
наклона зрительной трубы; i
—
наклон горизонтальной оси. В новых
теодолитах устойчивость горизонтальной
оси достигается,
с одной стороны, конструкцией лагер, а
с другой — конструкцией
наводящего устройства.
Наводящее устройство выполняют так, чтобы влияние на ось сил, способных сдвинуть ее по азимуту или высоте, было минимальным
Суммарная
ошибка соблюдения геометрических
параметров горизонтальной
осевой системы (отклонения от цилиндрической
формы,
соблюдение диаметра цапфы, качество
шлифовки и т. п.) определяются как![]() где
где![]() —
цена деления уровня.
—
цена деления уровня.