

Апериодическое звено второго порядка
.
Дифференциальное уравнение
![]() .
.
Характеристическое уравнение и его корни
Апериодическое звено второго порядка имеет действительные корни характеристического уравнения. Для этого должно выполняться условие
![]() .
.
Вставить переходную и весовую функцию.
При выполнении этого условия характеристическое уравнение может быть представлено в виде произведения
![]()
причем постоянные времени T3 иT4 находятся из уравнений
![]() .
.
Передаточная функция апериодического звена второго порядка
![]()
может быть представлена как произведения передаточных функций двух апериодических звеньев с общим коэффициентом усиления k:
![]() .
.
Амплитудно-фазовая частотная характеристика получается, если положить s=j:
![]() .
.
Частотную передаточную функцию можно представить в виде
W(j)=U()+jV().
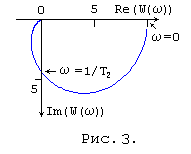
Из полученного выражения следует, что
- при =0 и при = W(j)=0,
- при =1/(T3T4)-1/2 действительная часть Re[W(j)]=0 и фазовый сдвиг в системе на этой частоте равен -/2,
- при >1/(T3T4)-1/2 действительная (U()) и мнимая (V()) части передаточной функции отрицательны и, следовательно, фазовый сдвиг в апериодическом звене второго порядка ()</2 (годограф при t проходит через третий квадрант).
По этим данным можно качественно определить вид амплитудно-фазовой частотной характеристики звена (рис. 3).
Амплитудно-частотная, амплитудная и фазовая частотные характеристики звена - произведение амплитудных частотных характеристик двух апериодических звеньев:
![]() ,
,
![]() .
.
Сопрягающие частоты, полагая для определенности, что T3>T4, 1=1/T3, 2=1/T4. При =(12)1/2=1/T2 то есть на среднегеометрической частоте, ()=-90o. Максимальный фазовый сдвиг lim()=-180o.
Выделение апериодическое звено второго порядка как отдельного типового звена оправдано тем, что в ряде случаев физически - это один элемент САУ (например, два сообщающиеся объема, наполняемых газом под давлением, электрический двигатель постоянного тока и др. ).
5) Критерии качества переходного процесса во времени
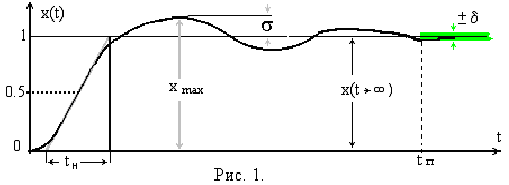
В качестве испытательного сигнала для оценки качества переходного процесса обычно используют единичный скачек воздействия. Типовой график переходного процесса представлен на рис. 1.
Переходный процесс характеризуется:
Длительностью переходного процесса (t п), то есть временем от начала переходного процесса до момента, начиная с которого выходная величина остается в пределах % от установившегося значения (обычно, %=5%).
Максимальным отклонением регулируемой величины (xmax) или величиной
 )
- перерегулированием. Перерегулирование
может быть выражено в процентах от
установившегося значения )
)
- перерегулированием. Перерегулирование
может быть выражено в процентах от
установившегося значения )
![]() .
.
Обычно перерегулирование лежит в пределах 10..30%, в некоторых случаях допускается перерегулирование до 70% [2].
- Временем нарастания выходного сигнала (tн). В точке x(t)=x(t)/2 строят касательную к x(t)и определяют временя нарастания, как показано на рис.1.
- Колебательностью, то есть числом колебаний, которое может наблюдаться в течение времени переходного процесса (обычно, 1..2 колебания, иногда - и 3..4 колебания). В некоторых с системах колебания на допускаются вообще [2].
Используются и другие критерии оценки переходных процессов (например, время запаздывания).
Те же критерии оценки применимы и для случая x(t)=0.