

1 Основні теоретичні положення
Вентилятори, які використовують на промислових підприємствах, приводяться в рух, як правило, від найбільш простих і надійних в експлуатації трифазних асинхронних електродвигунів з короткозамкненим ротором і працюють в тривалому режимі з постійним навантаженням.
Для забезпечення однакової швидкості вала вентилятора і вала ротора привідного електродвигуна їх здійснють за допомогю муфти. Якщо ці швидкості повинні відрізнятися, вал електродвигуна і вал вертилятора зєднуються за допомогю механічної передачі.
Для експериментального визначення потужності електродвигуна, який буде забезпечувати нормальну роботу вентилятора, потужність його повинна бути достатньою для обертання вентилятора з номінальною швидкістю при відкритій заслонці повітреводу.
Змінюючи потужність Р1 , яку споживає електродвигун з мережі, і вираховуючи втрати Р , що мають місце в самому електродвигуні, знаходимо потужність Р2 на його валу
Р2 = Р1 - Р , кВт (5.1)
Вентиляторна установка працює у режимі постійного навантаженя, тому потужність привідного електродвигуна можна вважати рівною Р2. Оскільки в каталогах електричних машин не завжди є електродвигуни з потужністю, що отримана експерементально, то вибирається електродвигун найближчої більшої потужності.
Таким чином, потужність електродвигуна РД для приводу вентилятора повинна бути
РД Р2. (5.2)
Вимірювання потужності Р1, яка споживається асинхронним електродвигуном, здійснюється за показами приладів. експериментальне визначення втрат Р є складною задачею, тому їх визначають розрахункови методом.
Як відомо, втрати в асинхронному електродвигуні розділяють на: механічні, магнітні, електричні і додаткові.
Механічні втрати - втрати на тертя валу в підшипниках, поверхні ротора повітряним проміжком, щіток контактні кільця, а також магнітні втрати на перемагнічування і вихрові струми в сталі статора. Їх часто об'єднують в втрати холостого ходу ∆Р0, які визначаються
∆Р0 = Р10 + ∆Рм1 , (5.3)
де ∆Р10 – втрати потужністі, при неробочому ході;
∆Рм1 – втрат потужністі на нагрів обмоток статора при неробочому ході.
Електричні втрати, які мають місце в обмотках статора і ротора, характеризуються потужністю, що витрачається на нагрівання провідників, по яких протікає електричний струм.
При з’єднанні обмоток статора зіркою електричні втрати рівні
![]() , (5.4)
, (5.4)
де I1 – фазний струм в обмотках статора електродвигуна, А;
r1- активний опір одної фази обмотки статора, Ом.
У випадку з’єднаня обмоток статора трикутником, формула (5.4) має вигляд:
![]() , (5.5)
, (5.5)
оскільки
при даному типі з’єднання струм, що
протікає по даній обмотці статора, буде
в
![]() рази менший за струм в проводах лінії,
що підходять до електродвигуна.
рази менший за струм в проводах лінії,
що підходять до електродвигуна.
Величина активного опору r1 обмотки статора визначається із співвідношення:
![]() , (5.6)
, (5.6)
де КГ - коефіцієнт, який враховує явище поверхневого ефекту і приймається рівним 1,05 – 1,15 для обмоток статора, виконаних відносно тонким приводом;
r10 - омічний опір однієї фази статора, який визначається методом амперметра і вольтметра.
Електричні втрати в обмотках ротора з фазни ротором, які з’єднані зіркою, визначаються
![]() , (5.7)
, (5.7)
де I2 – фазний струм в обмотці ротора, А;
r2 - активний опір одної фази обмотки ротора, який прирівнюється омічному опору r20 внаслідок малої частоти струмів в роторі, Ом.
Вимірювання величин r10 і r20 бажано проводити для нагрітого стану машини, що встановився.
Електричні втрати в роторі з короткозамкненою обмоткою наближено визначаються співвідношенням
![]() , (5.8)
, (5.8)
де S - ковзання.
Додаткові втрати Рдод приймаються 0.5% від номінальної потужності електродвигуна, тобто
∆Рдод = 0,005 Рном , (5.9)
де Рном – потужність, яка вказується в паспорті двигуна.
Таким чином, сумарні втрати в асинхронному електродвигуні
Р = Р0 + Рм1 + Рм2 + Рдод , (5.10)
або, враховуючи попередні співвідношення
![]() (5.11)
(5.11)
Підставивши (5.11) у (5.1) отримуємо потужність на валу електродвигуна:
![]() (5.12)
(5.12)
Величина ковзання визначається із співвідношення
![]() ,
(5.13)
,
(5.13)
де 1 = 60 f / p – синхронна швидкість, (p – кількість пар полюсів; f – частота мережі живлення 50 Гц).
2 - швидкість ротора, виміряна тахометром.
Після визначення потужності Р2, знаходиться коефіцієнт завантаження 1 електродвигуна
![]() (5.14)
(5.14)
де РНОМ – номінальна потужність встановленого електро-двигуна.
Якщо величина коефіцієнта завантаження 1 виявиться до 45%, то встановлений електродвигун, що працює з незмінними значеннями коефіцієнта потужності (сos ) і ККД () (рис.5.1) потрібно замінити на електродвигун меншої потужності.
При 1>70% електродвигун потрібно залишити. Якщо ж коефіцієнт завантаження 1 буде в межах 45%<1<70%, то питання доцільності заміни його може бути вирішене тільки шляхом розрахунку, причому перевага віддається тому електродвигуну, при якому втрати активної потужності в системі менше.
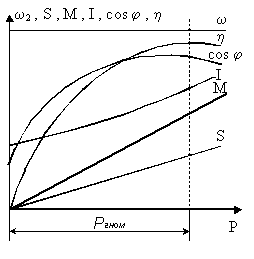
Рисунок 5.1 – Робочі характеристики асинхронного двигуна
В окремому випадку, заміна електродвигуна іншим меншої потужності завжди себе оправдовує, якщо має місце зменшення активної потужності в самому електродвигуні, тобто коли
![]() (5.15)
(5.15)
де Р2 – потужність на валу електродвигуна привода вентиля-тора;
1, 2 – значення ККД, встановленого і вибраного електро-двигунів при відповідних коефіцієнтах завантаження, що знаходяться за формулою (5.14).
Числові значення ККД (1 і 2) знаходяться за кривими 1 = f(1), 2 = f(2), котрі будуються за даними каталогів електричних машин.
Якщо величина РД < 0, то для кінцевого вирішення питання про заміну електродвигуна необхідно знайти загальні втрати активної потужності в системі за формулою:
РС = Рд + Ке ( Q1 – Q2 ) (5.16)
Якщо величина РС > 0, то заміна електродвигуна на меншу потужность доцільна, і при РС 0 – заміна електродвигуна недоцільна.
Величини Q1 і Q2 – це реактивні потужності відповідно встановленого і вибраного електродвигунів при коефіцієнтах навантаження 1 і 2, а коефіцієнт Ке є економічним еквівалентом реактивної потужності, котрий при коефіцієнті потужності електроприймача cos = 0,75 0,90 приймається відповідно Ке = 0,08 0,06.
Числові значення Q1 і Q2 знаходяться із співідношення
 ,
(5.17)
,
(5.17)
де QХі – реактивна потужність, яка використовується електро-двигуном при неробочому ході;
tq номі – знаходиться за номінальним коефіцієнтом потужності електродвигуна;
ті – коефіцієнт, який залежить від cos номі (рис.5.2).
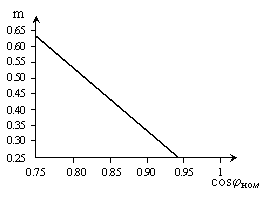
Рисунок 5.2 – Залежність коефіцієнта т від номінального коефіцієнта потужності cos ном асинхронного електродвигуна
З достатньою для практики точністю Qі можна визначити за формулою
![]() , (5.18)
, (5.18)
де і = f ( i ) і знаходиться за графіком (рис.5.3).
Реактивна потужність QХі, яка використовується електродвигуном в режимі холостого ходу, знаходиться із співвідношення
![]() (5.19)
(5.19)
де Рномі і номі - відповідно номінальні значення потужності і ККД встановленого і вибраного електродвигунів.
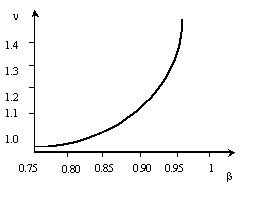
Рисунок 5.3 – Залежність коефіцієнта від коефіцієнта завантаження асинхронного електродвигуна
2 ПРОГРАМА РОБОТИ
2.1 Ознайомитися з режимом роботи електродвигуна привода вентилятора.
2.2 Визначити потужність на валу електродвигуна методом розділення втрат.
2.3 Знайти потужність електродвигуна для приводу вентилятора.
2.4 Вибрати за каталогом електродвигун для приводу вентилятора і визначити доцільність заміни ним встановленого електродвигуна.
3 ОПИС СХЕМИ УСТАНОВКИ
Установка, для дослідження привода вентилятора і експериментального визначення потужності його двигуна (рис.5.4) складається з трифазного асинхронного електродвигуна з короткозамкненим ротором М1 , який приводить в рух відцентровий вентилятор. На одному валу з двигуном М1 знаходиться тахогенератор М2 з тахометром Рω для вимірювання швидкості.
Увімкнення схеми здійснюється з допомогою автоматичного вимикачів QF1 і QF2.
Для вимірювання лінійної напруги U , струму в фазах І, а також споживаної потужності Р1 в колі статора передбачений вимірювальний комплект К505.
Триполюсний перемикач SA дозволяє підводити до обмоток статора трифазний струм або приєднати їх до постійного струму, де методом амперметра і вольтметра визначається омічний опір обмотки.
Струм регулюється резистором RR1 і контролюється амперметром РА0. напруга вимірюється вольтметром PV0.
Рисунок 5.4 – Принципова схема дослідження електроприводу вентиляторної установки
4 ПОРЯДОК ВИКОНАННЯ РОБОТИ
4.1 Ознайомитись з приладами, апаратами, венти-лятором і іншим обладнанням експериментальної установки і записати їх технічні характеристики.
4.2 Зібрати схему установки (рис.5.4) для експери-ментального дослідження потужності, споживаної приводом вентилятора, і закрити заслонку системи вентиляції.
4.3 Перевірити схему керівником роботи.
4.4 Увімкнутии автоматичний вимикач QF1.
4.5 Перевести перемикач SA в положеня для живлення обмоток статора С1, С2, С3 від мережі змінного струму.
Впевнившись, що вентилятор обертається в правильному напрямку при закритій засувці виміряти U, І , Р і в режимі неробочого ходу. Відкрити заслонку, дати установці попрацювати певний час для встановлення сталого режиму, після чого записати покази приладів, що знаходяться в колі статора. Виміряти з допомогою тахометра швидкість обертання валу вентилятора.
П р и м і т к а : Якщо напрям обертання при пуску виявився протилежним потрібному, то необхідно вимкнути установку і змінити послідовності живлення фаз статора, для чого треба пересунути місцями два проводи (дві фази), які підходять до обмоток статора, і знов увімкнути установку.
4.6 Змінюючи навантаження вентилятора з допомогою засувки, виміряти струм, потужність, напругу і частоту обертання. Результати досліджень занести в таблицю 5.1
Таблиця 5.1 – Результати досліджень
№ дос. |
Напруга |
Струм |
Підведена потужність |
Швидкість обертання вентилятора |
Примітка |
|
U, B |
I, A |
P, кВт |
, об/хв |
|
1 |
|
|
|
|
Наванта-ження |
2 |
|
|
|
|
Неробо-чий хід |
4.7 Вимкнути автомат QF1 і після зупинки електро-двигуна, увімкнути автомат QF2. Триполюсний перемикач SA встановити в положення 2 для подачі постійної напруги обмотки на статора електродвигуна в дві фази (С1, С2). Визначити покази приладів при різних положеннях повзунка регулювального реостату RR1. Результати досліджень занести в таблицю 5.2.
Таблиця 5.2 – Результати вимірювання омічного опору
№ досліду |
Напруга , U0, B |
Струм, І0, А |
Результати розрахунків r10 |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4.8 На основі результатів досліджень (таблиці 5.1 і 5.2) провести розрахунки і занести результати в таблицю 5.3.
4.9 Підрахувати величину омічного опору обмотки статора. При розрахунку використовувати співвідношення для з’єднання обмотки статора зіркою:
![]() ; (5.20)
; (5.20)
для з’єднання трикутником:
![]() . (5.21)
. (5.21)
4.10 Вибрати за каталогом електродвигун, необхідний для приводу вентилятора, зиписати його технічні дані, а також дати рекомендації, підкріплені розрахунками, про заміну або подальшу експлуатацію встановленого електродвигуна.
Таблиця 5.3 – Дані досліджень і результати розрахунків
№ досліду |
Результати розрахунків |
||||||||
1 |
S |
1-S |
ΔPМ1 |
ΔPМ2 |
ΔР0 |
ΔРД |
Р |
Р2 |
|
об/хв |
|
|
Вт |
Вт |
Вт |
Вт |
Вт |
Вт |
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
5 ЗМІСТ ЗВІТУ
У звіті необхідно подати
5.1 Схему установки та її короткий опис.
5.2 Таблиці з даними дослідів та розрахунків.
5.3 Розрахувати потужність електродвигуна та вибрати його по каталогу.
5.4 Висновки по роботі установки.
6 КОНТРОЛЬНІ ЗАПИТАННЯ
6.1 Які існують методи визначення потужності на валу електродвигуна?
6.2 Які втрати мають місце в асинхронному електро-двигуні, від чого вони залежать і як визначаються?
6.3 Яке має значення правильний вибір потужності електродвигуна?
6.4 Що є основним для вибору потужності, роду струму, величини напруги, швидкості руху і конструктивного виконання приводного електродвигуна?
6.5 В яких випадках доцільно заміняти недостатньо завантажені асинхронні електродвигуни на меншу потужності, і коли така заміна не дає помітного результату?
6.6 Який показник визначає доцільність заміни незавантажених електродвигунів на меншу потужності і як він визначається?