

2.5.3 Графическая иллюстрация метода Гаусса–Зейделя
Проиллюстрируем сходимость или расходимость метода Гаусса–Зейделя на примере системы уравнений
![]()
Сразу отметим, что достаточное условие сходимости метода Гаусса–Зейделя (2.15) для данной системы не выполняется, поскольку
![]() .
.
В соответствии с рекомендациями метода Гаусса–Зейделя перепишем эту систему в виде
![]()
и получим следующие формулы итераций
 (2.16)
(2.16)
Решение
![]() данной системы определяется как точка
пересечения двух прямых
данной системы определяется как точка
пересечения двух прямых
![]() и
и
![]() .
Эти прямые изображены на рисунке 2.2. В
соответствии с формулой итераций (2.16)
мы выбираем начальное приближение
.
Эти прямые изображены на рисунке 2.2. В
соответствии с формулой итераций (2.16)
мы выбираем начальное приближение
![]() ,
подставляем это значение в первое
уравнение системы
и из него определяем новое приближение
,
подставляем это значение в первое
уравнение системы
и из него определяем новое приближение
![]() .
Затем это значение
подставляем во второе уравнение системы
и из него определяем новое приближение
.
Затем это значение
подставляем во второе уравнение системы
и из него определяем новое приближение
![]() .
На этом первая итерация заканчивается.
Далее этот процесс повторяется. Описанные
итерации изображены на рисунке 2.2 прямыми
линиями со стрелками. Мы видим, что
итерационный процесс не сходится к
решению системы.
.
На этом первая итерация заканчивается.
Далее этот процесс повторяется. Описанные
итерации изображены на рисунке 2.2 прямыми
линиями со стрелками. Мы видим, что
итерационный процесс не сходится к
решению системы.
Переставим теперь уравнения системы, т.е. будем решать систему
![]()
Достаточное условие сходимости метода Гаусса-Зейделя (2.15) теперь выполняется:
![]() .
.
В соответствии с рекомендациями метода Гаусса–Зейделя перепишем эту систему в виде

и организуем итерационный процесс по формулам
 (2.17)
(2.17)
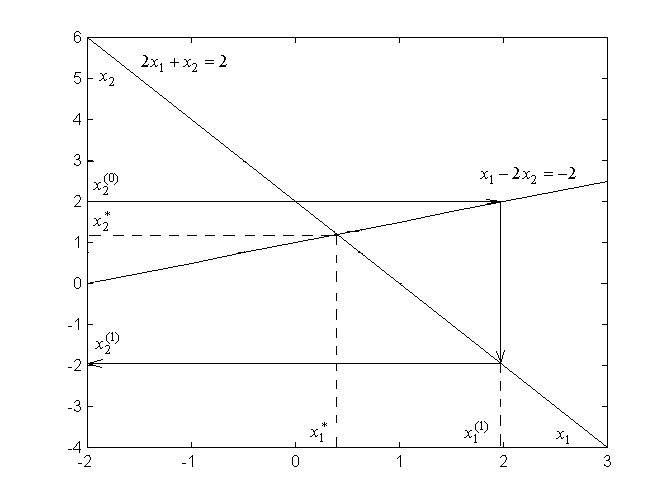
Рисунок 2.2 – Иллюстрация расходимости метода Гаусса–Зейделя
В соответствии с формулой итераций (2.17) мы выбираем начальное приближение , подставляем это значение в первое уравнение системы и из него определяем новое приближение . Затем это значение подставляем во второе уравнение системы и из него определяем новое приближение . Далее этот процесс повторяется. Описанный процесс итераций изображен прямыми линиями со стрелками на рисунке 2.3. Мы видим, что процесс сходится. Таким образом, простой перестановкой уравнений системы мы добились сходимости метода Гаусса–Зейделя.
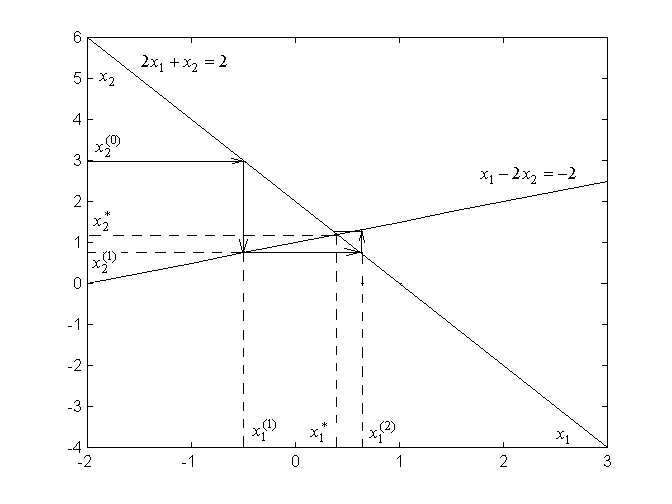
Рисунок 2.3 – Иллюстрация сходимости метода Гаусса-Зейделя
3 Аппроксимация функций
3.1 Понятие аппроксимации функций
Аппроксимация
функции
![]() – это замена этой функции другой более
простой функцией
– это замена этой функции другой более
простой функцией
![]() ,
близкой к
,
близкой к
![]() в некотором смысле. В зависимости от
критерия близости функций
и
в некотором смысле. В зависимости от
критерия близости функций
и
![]() существуют различные методы аппроксимации.
существуют различные методы аппроксимации.
Если
расстояние
![]() между функциями
и
на некотором отрезке
между функциями
и
на некотором отрезке
![]() действительной прямой определить
выражением
действительной прямой определить
выражением
![]() ,
,
то аппроксимация функции по критерию минимума такого расстояния будет называться аппроксимацией с минимальной интегральной квадратичной погрешностью.
Если
критерий близости функций
и
состоит в том, чтобы
и
совпадали в дискретном ряде точек
![]() отрезка
,
то такой способ аппроксимации функции
называется интерполированием
функции
.
отрезка
,
то такой способ аппроксимации функции
называется интерполированием
функции
.
Если расстояние между функциями и на некотором отрезке действительной прямой определить выражением
![]() ,
,
то аппроксимация функции по критерию минимума такого расстояния будет называться аппроксимацией по методу наименьших квадратов.