

2.6.2 Вибір апаратів управління
Апаратурою управління й захисту прийнято називати також електричні апарати, які служать для управління електродвигунами при пуску, зупинці й регулюванні швидкості, а також для захисту їхніх обмоток від перевантаження, надмірного зниження напруги й струмів короткого замикання.
Кожний апарат електричного ланцюга повинен задовольняти наступним вимогам:
Кожний електричний апарат повинен мати певну «термічну стійкість», тобто не перегріватися понад припустимі межі при нормальному режимі роботи й при короткому замиканні в електричному колі.
Електрична ізоляція апарата повинна витримувати будь-яку напругу, що може, хоча б миттєво, з'явитися в електричному ланцюгу при експлуатації апарата.
Контакти апарата повинні включати й відключати максимально можливі струми, які можуть виникнути, хоча б короткочасно, при експлуатації апарата.
Основними параметрами, по яким вибирається більшість апаратів, є величина напруги, припустиме навантаження, режим роботи, частота включень, число рівних і блокувальних контактів.
У схемі управління механізмом підйому мостового крану, в якій використовується силовий контролер типу ККТ-61 (рис. 2.2), використовується наступна апаратура:
Рубильник (
 )
– найбільш простий апарат, за допомогою
якого можна включати й відключати
силовий електричний ланцюг й ланцюг
управління. Вибираємо рубильник
)
– найбільш простий апарат, за допомогою
якого можна включати й відключати
силовий електричний ланцюг й ланцюг
управління. Вибираємо рубильник
 (
).
(
).Контролер (
 )
– ККТ-61.
)
– ККТ-61.Кінцеві вимикачі (
 ,
, ,
,
 )
призначені для автоматичного відключення
двигуна при досягненні механізмом
крайнього положення, перехід якого
пов’язаний з поломкою механізму або
будь-якої її частини.
)
призначені для автоматичного відключення
двигуна при досягненні механізмом
крайнього положення, перехід якого
пов’язаний з поломкою механізму або
будь-якої її частини.Реле напруги ( ) застосовується в якості реле нульового захисту, реле контролю напруги. Вибираємо електромагнітне реле
 із самозбудженням.
із самозбудженням.Плавкі запобіжники (
 ,
,
 )
служать для захисту електричних кіл
від коротких замикань. Вибираємо
)
служать для захисту електричних кіл
від коротких замикань. Вибираємо
 ,
з номінальним струмом запобіжника
,
з номінальним струмом запобіжника
 і струмом плавкої вставки
і струмом плавкої вставки
 .
.
2.7 Побудова механічних характеристик
Механічною характеристикою двигуна (рис. 2.6) називається залежність його швидкості чи ковзання від моменту, який розвивається.
Природна характеристика двигуна відповідає основній схемі його включення і номінальних параметрів живильної напруги. На природній характеристиці розташовуються точки номінального, пускового і максимального режимів двигуна.
Вихідні дані для побудови:
перевантажувальна здатність
електродвигуна
|
|
кратність пускового моменту
|
|
номінальна швидкість двигуна |
|
швидкість холостого ходу двигуна |
|
Визначаємо
кутову швидкість обертання електродвигуна
![]()
![]() ;
;
![]() .
.
Визначаємо
номінальний момент електродвигуна
![]()
![]() ;
;
![]() .
.
Визначаємо
величину номінального ковзання
![]()
![]() ;
;
![]() .
.
Визначаємо постійний коефіцієнт у відносних одиницях
![]() ;
;
![]() .
.
Визначаємо критичне ковзання
у відносних одиницях
![]()
![]() ;
;
![]() .
.
Визначаємо додатковий коефіцієнт у відносних одиницях
![]() ;
;
![]() .
.
Момент електродвигуна при заданому ковзанні
![]() ,
,
де
![]() – значення ковзання від 1 до 0.
– значення ковзання від 1 до 0.
Розрахунок і побудову графіка механічної характеристики робимо на ПЕОМ за допомогою програми MachCAD.
si |
Mi |
|
si |
Mi |
|
si |
Mi |
|
si |
Mi |
0 |
0 |
|
0,26 |
432,8658 |
|
0,51 |
429,2097 |
|
0,76 |
375,4137 |
0,01 |
0 |
|
0,27 |
436,0013 |
|
0,52 |
427,3027 |
|
0,77 |
373,2412 |
0,02 |
40,8826 |
|
0,28 |
438,6653 |
|
0,53 |
425,3483 |
|
0,78 |
371,079 |
0,03 |
78,753 |
|
0,29 |
440,8954 |
|
0,54 |
423,3517 |
|
0,79 |
368,9276 |
0,04 |
113,7626 |
|
0,3 |
442,7266 |
|
0,55 |
421,3174 |
|
0,8 |
366,7876 |
0,05 |
146,0662 |
|
0,31 |
444,191 |
|
0,56 |
419,25 |
|
0,81 |
364,6596 |
0,06 |
175,8195 |
|
0,32 |
445,3184 |
|
0,57 |
417,1534 |
|
0,82 |
362,5441 |
0,07 |
203,1767 |
|
0,33 |
446,136 |
|
0,58 |
415,0315 |
|
0,83 |
360,4415 |
0,08 |
228,2888 |
|
0,34 |
446,6693 |
|
0,59 |
412,8877 |
|
0,84 |
358,3521 |
0,09 |
251,3024 |
|
0,35 |
446,9415 |
|
0,6 |
410,7251 |
|
0,85 |
356,2763 |
0,1 |
272,3585 |
|
0,36 |
446,9742 |
|
0,61 |
408,5468 |
|
0,86 |
354,2145 |
0,11 |
291,5921 |
|
0,37 |
446,7871 |
|
0,62 |
406,3553 |
|
0,87 |
352,1669 |
0,12 |
309,1316 |
|
0,38 |
446,3986 |
|
0,63 |
404,1534 |
|
0,88 |
350,1337 |
0,13 |
325,0984 |
|
0,39 |
445,8257 |
|
0,64 |
401,9432 |
|
0,89 |
348,1152 |
0,14 |
339,6071 |
|
0,4 |
445,0839 |
|
0,65 |
399,727 |
|
0,9 |
346,1115 |
0,15 |
352,7654 |
|
0,41 |
444,1877 |
|
0,66 |
397,5066 |
|
0,91 |
344,1229 |
0,16 |
364,6742 |
|
0,42 |
443,1504 |
|
0,67 |
395,2839 |
|
0,92 |
342,1494 |
0,17 |
375,4276 |
|
0,43 |
441,9841 |
|
0,68 |
393,0607 |
|
0,93 |
340,1912 |
0,18 |
385,1138 |
|
0,44 |
440,7004 |
|
0,69 |
390,8383 |
|
0,94 |
338,2484 |
0,19 |
393,8144 |
|
0,45 |
439,3096 |
|
0,7 |
388,6183 |
|
0,95 |
336,321 |
0,2 |
401,6056 |
|
0,46 |
437,8214 |
|
0,71 |
386,4019 |
|
0,96 |
334,409 |
0,21 |
408,558 |
|
0,47 |
436,2447 |
|
0,72 |
384,1905 |
|
0,97 |
332,5127 |
0,22 |
414,737 |
|
0,48 |
434,5879 |
|
0,73 |
381,9849 |
|
0,98 |
330,6318 |
0,23 |
420,2032 |
|
0,49 |
432,8585 |
|
0,74 |
379,7863 |
|
0,99 |
328,7666 |
0,24 |
425,0129 |
|
0,5 |
431,0636 |
|
0,75 |
377,5956 |
|
1 |
326,9169 |
0,25 |
429,2177 |
|
|
|
|
|
|
|
|
|
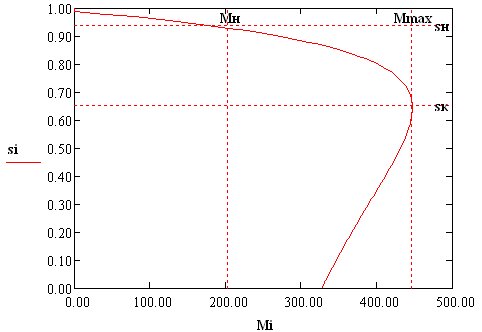
Рис. 2.6 – Механічна характеристика асинхронного двигуна