

Ивановский государственный энергетический университет
Кафедра электропривода и автоматизация промышленных установок
Электронный конспект лекций
Колганов А.Р. МОДЕЛИРОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ
Автор: КОЛГАНОВ Алексей Руфимович, д.т.н., профессор кафедры "Электропривод и автоматизация промышленных установок" Ивановского государственного энергетического университета Тел. (0932) 385795, (0932) 419063 E-mail: klgn@mech.ispu.ru klgn@indi.ru
Введение Первая часть курса
Основные термины и определения. Концепция структурного моделирования электромеханических систем
Алгоритмический базис структурного моделирования электромеханических систем
Функциональный уровень алгоритмического базиса структурных моделей
Алгоритмические модели динамических систем
Алгоритмы формирования концептуальных и вычислительных моделей ЭМС
Матрично-структурные модели для имитации динамического поведения ЭМС
Универсальный алгоритм автоматического построения дерева вычислений в задачах конструирования вычислительных моделей
Структурные модели элементов и подсистем электропривода
Список литературы
Введение. Цели и задачи второй части курса
Краткие сведения из теории обобщенной электрической машины
Координатные преобразования уравнений электромеханического преобразования энергии
Фазные преобразования переменных. Выбор скорости вращения координатных осейu, v
Обобщенная структурная модель асинхронного электродвигателя
Построение структурной модели электромеханического преобразования энергии в асинхронном электродвигателе для системы координат

Построение структурной модели электромеханического преобразования энергии в асинхронном электродвигателе для системы координат d,q
Алгоритмические основы построения структурных моделей автономных инверторов напряжения
Логическая модель АИН
Электромеханическая система как объект функционального проектирования
Многоуровневая декомпозиция электромеханических систем и этапа их функционального проектирования
Ранжирование математических моделей электромеханических систем
Основные направления конструирования моделей электромеханических систем
Технологическая схема автоматизации функционального проектирования электромеханических систем
Цель преподавания дисциплины
Курс имеет целью изучение современных методов и технологий автоматизации выполнения исследовательских и проектных работ в области электропривода и электромеханических систем.
Полученные в курсе сведения используются в дальнейшем при изучении практически всех профилирующих дисциплин специальности, выполнении курсовых и дипломных проектов.
Задачи изучения курса
Основной задачами курса являются:
формирование навыков решения типовых расчетных исследовательских и проектных задач электромеханики с помощью современного проблемно-ориентированного и объектно-ориентированного программного обеспечения и современных интерфейсных средств ПЭВМ;
формирование устойчивого представления об использовании различных вариантов математического аппарата описания динамического поведения электромеханических систем и способах построения доступных, ориентированных на проблемного специалиста моделей таких систем:
формирования навыков решения практических задач автоматизации моделирования современного электромеханических систем при решении исследовательских и проектных задач:
формирования навыков построения структурных моделей типовых элементов и подсистем электропривода с целью их использования в лабораторном практикуме при изучении смежных курсов специальности, в курсовом и дипломном проектировании, НИРС
Перечень дисциплин, усвоение которых необходимо для изучения курса
высшая математика - дифференциальное, интегральное и операционное исчисление, матричная алгебра, теория дифференциальных уравнений.
теоретические основы электротехники - математическое описание электрических цепей, переходные процессы в линейных и нелинейных цепях.
прикладное программирование - стандарт пользовательского интерфейса (SAA) фирмы IBM, современные методы численного интегрирования дифференциальных и алгебраических уравнений, методы алгоритмизации математических задач на графах.
теория автоматического управления - специальный математический аппарат (преобразования Лапласа, передаточные функции, графы и структурные схемы, элементы теории переменных состояния).
Общая характеристика и рекомендации по изучению материала
Материал электронного конспекта лекций по курсу "Моделирование электромеханических систем" посвящен теоретическим и практическим вопросам построения структурных моделей современных динамических объектов (автоматизированных электроприводов, робото-технических систем, систем управления движущимися объектами и т.п.), подготовки и постановки имитационных экспериментов с этими моделями.
Теоретическая часть курса дает представление о сложности построения современных имитационных систем и о методах внутримашинного преобразования моделей в целях получения простого, доступного широкому кругу пользователей инструментария моделирования.
Изучение практических вопросов предлагаемого материала позволяет сформировать начальные навыки по построению и использованию структурных моделей электромеханических систем. Этот материал в первую очередь ориентирован на использования компьютерного комплекса имитационного моделирования динамических систем IDS 1.0 [6]. Приведенные здесь схемы моделей созданы и апробированы в среде этого комплекса.
Для закрепления полученных практических знаний лабораторного практикума
Программное обеспечение комплекса IDS 1.0, электронное руководство по его применению, практическое пособие [6], а также задания и методические указания по выполнению лабораторного практикума могут быть поставлены на Ваш компьютер при дополнительном обращении.
Алгоритмический базис структурного моделирования электромеханических систем
Под алгоритмическим базисом будем понимать совокупность средств построения моделей, методов их графического представления и алгоритмов преобразования этих моделей.
Наличие четырех уровней описания моделей, предложенных в концепции структурного моделирования динамических систем, предопределяет соответствующее разделение и алгоритмического базиса структурного моделирования.
К настоящему времени концепция структурного моделирования динамических систем может быть практически реализована с помощью отечественных и зарубежных систем моделирования при использовании в основном первых трех уровней описания структурных моделей. Среди современных разработок здесь можно отметить системы LabVIEW, Micro-Cap, VisSim, Экспресс-Радиус, МВТУ (Моделирование в технических устройствах). Наибольший интерес в указанной области представляет семейство комплексов моделирования, созданных в Ивановском энергетическом университете. При представлении материала настоящего курса будем ориентироваться на использование программно-методического комплекса МИК-АЛ [1], функционирующего под управлением MS DOS, и компьютерного комплекса IDS 1.0 [6], функционирующего под управлением Windows 9x.
Для пользователей компьютерных средств автоматизации моделирования динамических систем наибольший интерес представляют математический и функциональный уровень описания структурных моделей. Поэтому первоначально остановимся на рассмотрении этих двух уровней алгоритмического базиса.
Математический уровень алгоритмического базиса структурных моделей
Для специалистов в области ЭМС наиболее удобно и традиционно графическое описание моделей в виде структурных схем.
Если фрагменты математического описания разделить на блоки в соответствии с физическими процессами, протекающими в системе, определить входные и выходные координаты и внутренние параметры каждого блока и изобразить схему взаимодействия блоков, то получим структурную модель математического уровня (СММУ). Таким образом, можно утверждать, что "кирпичиками", из которых конструируется СММУ, являются динамические элементы. В общем случае динамический элемент представляется в виде блока, осуществляющего преобразования входных воздействий в выходной сигнал элементов в соответствии с заданной функцией.
Многообразие указанных функций предопределяет необходимость разделения динамических элементов на классы. Укажем наиболее используемые классы динамических элементов:
Элементы задания внешних воздействий (класс V)
Линейные безынерционные элементы (класс U).
Линейные инерционные элементы (класс L).
Нелинейные функциональные элементы (класс N).
Специальные функциональные элементы (класс C).
Дискретные функциональные элементы (класс D). C
Дискретные фильтры (класс Z).
Контролирующие функциональные элементы (класс K).
Элементы описания дискретного автомата (класс DA).
Каждый динамический элемент характеризуется следующими атрибутами:
порядковым номером;
идентификатором класса;
описанием выполняемой функции;
параметрами указанной функции;
номером активизирующего элемента, если данный динамический элемент может находиться в активном или пассивном состоянии.
Рассмотрим краткие характеристики элементов каждого класса.
Элементы задания внешних воздействий (класс V) предназначены для формирования внешних ступенчатых воздействий. Элемент характеризуется величиной ступенчатого сигнала А и временем его приложения t. Выходной сигнал элемента определяется в каждый момент времени как
![]()
(2.1)
Графически элемент изображается в виде прямоугольника (рис. 2.1) с одним выходом.

Для получения более сложных форм внешних воздействий необходимо использовать комбинации элементов возмущения с динамическими элементами других классов.
Линейный безынерционный элемент (класс U) характеризуется коэффициентом передачи KU. В каждый момент времени значение выходного сигнала формируется как
![]()
(2.2)
где x(t) - значение входного сигнала элемента, Ku - значение коэффициента передачи.
Графическое представление элемента класса U приведено на рис. 2.2

Линейные инерционные элементы (класс L) реализуют линейное преобразование входного сигнала в выходной в соответствии с передаточной функцией
![]()
(2.3)
что соответствует дифференциальному уравнению n- порядка
![]()
(2.4)
при нулевых начальных условиях.
В каждый момент времени значение выходного сигнала формируется в результате численного интегрирования дифференциального уравнения (2.4)
Графическое представление элемента класса L приведено на рис. 2.3.

С использованием элементов перечисленных выше трех классов могут быть построены структурные модели математического уровня линейных электромеханических систем. Так, например, модель для изучения динамических процессов пуска и останова электродвигателя постоянного тока независимого возбуждения при постоянном магнитном потоке (Ф=const) принимает вид, приведенный на рис. 2.4.
Здесь электромеханические процессы преобразования энергии описаны следующей системой линейных дифференциальных уравнений:

(2.5)
Входное напряжение электродвигателя U нарастает по экспоненциальному закону и мгновенно отключается при достижении модельного времени значения t=1.5

Нелинейные функциональные элементы (класс N) осуществляют нелинейные и логические преобразования входных сигналов в выходные. Класс этих элементов условно может быть разделен на три подкласса:
статические безынерционные нелинейности с одним входом и одним выходом;
статические безынерционные нелинейности со многими входами и одним выходом;
динамические нелинейные элементы.
В общем случае с помощью нелинейных элементов осуществляется операция
![]()
(2.6)
где y(t) -
выходной сигнал элемента, x(t) -
вектор входных сигналов. A -
вектор параметров, t -
время.
-
время.
Примеры графического представления нелинейных функциональных элементов приведены на рис. 2.5.
Используя отдельные нелинейные элементы, приведенная на рис. 2.4 структурная модель может быть перестроена для изучения динамических процессов в двигателе постоянного тока при изменении магнитного потока (Ф=var) и линейном нарастании входного напряжения U до заданного уровня.(рис. 2.6).
Здесь использованы три вида нелинейных элементов:
О граничение (элемент
№4) - для формирования кривой входного
напряжения, Умножение (элементы
6,7) - для перемножения мгновенных значений
переменных и Табличная
нелинейность - для
учета реальной кривой намагничивания
электродвигателя
граничение (элемент
№4) - для формирования кривой входного
напряжения, Умножение (элементы
6,7) - для перемножения мгновенных значений
переменных и Табличная
нелинейность - для
учета реальной кривой намагничивания
электродвигателя
На начальном этапе изучения теоретического материала и выполнения практических заданий и лабораторного практикума, как правило, используются элементы четырех рассмотренных выше классов. Поэтому, характеристики других классов элементов мы пока приводить не будем.
Базовый состав функциональных элементов структурных моделей математического уровня приведен в приложении 1.
Структурная модель конкретной электромеханической системы конструируется из базовых элементов путем объединения точек входа и выхода и введения узлов алгебраического суммирования сигналов. Исходной информацией для построения структурных моделей математического уровня могут быть математическое описание динамических процессов в форме дифференциальных уравнений или структурная схема исследуемой системы.
С появлением средств графического взаимодействия отпала необходимость в разработке, изучении и использовании специализированных языков моделирования. К настоящему времени практически все системы моделирования имеют интерфейсные средства, позволяющие пользователю быстро и удобно нарисовать структурную модель для дальнейшей постановки имитационных экспериментов.
Функциональный уровень алгоритмического базиса структурных моделей
Структурные модели математического уровня (СММУ), построенные для реальных электромеханических систем отличаются наличием большого числа функциональных элементов, многообразием межэлементных связей. Поэтому такие модели слабо отражают физические и схемотехнические свойства исследуемых объектов. Для специалистов в области электромеханических систем наиболее удобным является представление моделей в виде схем, максимально приближенным к так называемым функциональным схемам, в которых указаны все виды соединения и взаимодействия реальных физических элементов. Указанным требованиям отвечают структурные модели функционального уровня (СМФУ).
Основными элементами такой модели являются:
элементы построения структурных моделей математического уровня (СММУ) всех перечисленных выше классов;
функциональные блоки (ФБ).
Под функциональным блоком будем понимать интегрированный элемент описания структурной модели физического звена, представленный в виде многополюсника с произвольным (в т.ч. и нулевым) числом входных и выходных каналов.
Внутри каждого функционального блока должен быть предварительно "зашит" один из многочисленных вариантов структурной модели соответствующего физического элемента. Таким образом, внутреннее описание функционального блока представляет собой схему соединения базовых элементов СММУ и функциональных блоков, выполняющую некоторое функционально законченное преобразование координат модели. То есть, предусматривается возможность использование так называемых вложенных функциональных блоков.
На рис 3.1 приведен пример внутреннего и внешнего изображения функционального блока, в качестве которого выбрана модель электродвигателя постоянного тока с разомкнутой обратной связью по ЭДС.
Внутреннее изображение нового ФБ конструируется практически также как и СММУ, дополнительно здесь изображаются и идентифицируются входные и выходные каналы, и вводятся идентификаторы формальных параметров. В отдельных случаях ФБ может не содержать входов и параметров, то есть допускается реальные значения параметров физического звена указывать при конструировании внутреннего изображения ФБ. Однако недостатки такого подхода вы сразу почувствуете при необходимости в ходе имитационных экспериментов изменения значений даже одного параметра.
Структурная модель функционального уровня конкретной электромеханической системы конструируется и базовых элементов СММУ и ФБ. Следует отметить, что на каждый входной канал ФБ может быть подан сигнал только с выхода элемента или ФБ, сигнал с узла суммирования на вход ФБ подавать нельзя. Конкретные значения параметров ФБ задаются при построении СМФУ. На рис. 3.2. приведено окно ввода параметров модели электродвигателя.
Введение в структурные модели функциональных блоков позволяет настраивать инвариантные имитационные системы на конкретный класс задач и конкретный коллектив пользователей. Для этих целей создаются коллективные и личные библиотеки макромоделей.
Так в качестве типовых функциональных блоков для систем автоматизированного электропривода можно выделить модели:
электродвигателей,
преобразовательных устройств,
регуляторов,
технологических объектов.

Для решения как учебных, так и практических задач наиболее целесообразным является использование структурных моделей функционального уровня, так как в этом случае модели получаются наглядными и максимально приближенными к функциональным схемам исследуемых электромеханических систем. Кроме того, с помощью одной схемы СМФУ могут быть представлены математические модели различной степени сложности для одного исследуемого объекта, а последовательное усложнение моделей сводится к замене внутренних изображений одного и нескольких функциональных блоков. А в том случае, если используются готовые ФБ, к введению новых имен этих блоков.
Учитывая, что внешнее представление структурной модели функционального уровня в явном виде не содержит математических форм описания объекта, а отражает лишь схему функционального взаимодействия физических элементов, предлагается использовать СМФУ какединую внешнюю графическую форму для различных классов математических моделей (структурных, векторно-матричных и т.п.) На рис. 3.3приведен пример СМФУ для простейшей системы электропривода.
Представленную здесь единую внешнюю графическую форму будем считать первым вариантом собственной формы структурной модели, а СММУ - вторым вариантом указанной формы. Таким образом, вид структурной модели (L- линейная, N-нелинейная, ND-нелинейно-дискретная, NVS - нелинейная переменной структуры) определяется наличием в СММУ соответствующих динамических элементов. На рис. 3.4 приведены внутренние представления функциональных блоков соответствующих L- модели системы. А на рис. 3.5функциональный блок P, соответствующий NVS-модели, раскрывается до схемы СММУ.


При решении учебных и практических задач моделирования, как правило, каждый пользователь использует как имеющиеся в составе программных средств моделирования, так и собственные библиотеки функциональных блоков. Создание и заполнение личных библиотек ФБ является достаточно ответственным процессом, так как допущенные здесь ошибки в формировании и описании моделей будут тиражироваться, оставаясь при этом не замеченными.
В этой связи для внесения внутреннего описания модели каждого функционального блока предлагается проводить т.н. двойное тестирование. При этом для формирования элемента библиотеки моделей ФБ необходимо выполнить следующую последовательность действий:
построить на бумаге внутреннее описание модели создаваемого функционального блока в форме СММУ;
определить тестовые значения параметров ФБ и диаграммы входных сигналов;
рассчитать или качественно оценить диаграммы изменения выходных сигналов модели, которые будут получены в результате имитационного эксперимента при правильном построении и описании схемы модели;
построить и испытать СММУ при выбранных параметрах и входных сигналах;
сформировать внутренне описание функционального блока и занести его в личную библиотеку ФБ;
построить на функциональном уровне и испытать модель испытания ФБ с использованием выбранных входных сигналов и значений параметров;
при абсолютном совпадении результатов испытаний структурных моделей математического и функционального уровней окончательно занести описание ФБ в личную библиотеку

Несомненно, что опытные пользователи могут сократить предлагаемый алгоритм заполнения библиотеки моделей ФБ.
Алгоритмические модели динамических систем
Для рассмотрения алгоритмов преобразования моделей, формируемых пользователем (СМФУ, СММУ), необходимо ознакомиться с возможными вариантами представления алгоритмических моделей.
Проблемы, возникающие при компьютерной реализации СММУ, связаны, во-первых, с необходимостью автоматизированного формирования корректной системы дифференциальных, алгебраических и логических уравнений и, во-вторых, с последующим ее представлением в виде дерева элементарных вычислительных операций.
Решение проблем первого направления требует более детализированного представления структурной модели с одновременной ориентацией на вычислительную систему и на исследователя. Этим требованиям применительно ко всем видам СММУ отвечают средства описания моделей с помощью многоуровневых N-графов [7,8].
Решение проблем второго направления осуществляется либо численным интегрированием полученной системы уравнений, либо путем формирования алгоритмической модели, в которой все интеграторы заменены деревом вычислительных операций, соответствующим выбранному методу численного интегрирования.
Рассмотрим особенности детализированного представления структурных моделей с помощью N-графов. В общем случае сигнал в i-узле графа в момент времени tn определяется выражением
![]()
Здесь fU - некоторая операция преобразования сигналов xk, входящих в узел; fW - некоторая операция преобразования сигнала xi с помощью k-й ветви, инцидентной i-му узлу; m - число ветвей, инцидентных узлу стока i.
Наличие элементов первого и второго уровней языка N-графов [7,8] обусловливает существование двух уровней детализированных форм структурных моделей. Детализированная форма первого уровня использует базовые операции: суммирование, умножение, деление, логические "и", "или", сравнения "больше", "меньше", "равно", операцию "переключение", в узлах N-графа и операции пропорционального преобразования, интегрирования, задержки на интервал дискретности и отрицания.
Определения и графическое представление алгебраических базовых операций в узлах N-графа приведены в табл. 4.1. Графические представления узлов, осуществляющих логические базовые операции, используют общепринятые символы этих операций, а именно

При необходимости номера ветвей, входящих в эти узлы, указываются в разрыве ветви. Например


Графические представления и определения базовых операций в ветвях приведены в таблице 4.2.
Таблица 4.1.
№ |
Наименование узла |
Определение |
Графическое представление |
1 |
Суммирование |
|
|
2 |
Умножение |
|
|
3 |
Деление |
|
|
4 |
Переключение |
|
|





Таблица 4.2.
№ |
Наименование ветви |
Определение |
Графическое представление |
1 |
Пропорциональное преобразование |
|
|
2 |
Интегрирование |
|
|
3 |
Задержка на интервал дискретности |
|
|
4 |
Операция НЕ |
|
|




Данный уровень характеризуется наивысшей степенью детализации для структурных моделей, построенных в форме замкнутого N-графа, и является детализированной формой СММУ.
Нетрудно заметить, что построение структурных моделей при использовании только указанных выше элементов сопряжено с трудностями формирования N-графов даже для простейших нелинейных математических операций. Например, N-граф простейшего нелинейного звена типа "Люфт" содержит 10 узлов и 14 ветвей (см. рис. 4.1).
Замкнутый N-граф, построенный с использованием макроветвей и макроузлов, будем считать детализированной формой второго уровня.
Продолжение рассмотрения алгоритмов формирования вычислительных моделей невозможно без определения основных требований к средствам проведения вычислительных экспериментов со структурными моделями и направлений их компьютерной реализации. В качестве требований отметим следующее.
Должна быть предоставлена возможность выполнения вычислительного эксперимента в одном и следующих режимах:
неуправляемом, когда отсутствует возможность наблюдать за поведением координат модели и нельзя вмешаться в ход выполнения эксперимента, за исключением его прекращения;
интерактивно-управляемом, когда имеется возможность оперативного наблюдения за ходом вычислительного эксперимента и поведением координат модели, активного вмешательства в проводимый эксперимент в целях изменения параметров и структуры модели, изменения параметров вычислительного эксперимента, организации серии экспериментов, качественного и количественного анализа результатов;
программно-управляемом, когда алгоритм поэтапного изменения структуры и параметров модели задан пользователем заранее в целях получения определенной информации об исследуемой системе путем автоматической постановки серии экспериментов.
Программно-аппаратные средства реализации вычислительного эксперимента должны обеспечивать получение достоверной информации обследуемой системы за минимальное время, что соответствует необходимости обеспечения численной устойчивости, требуемой точности и максимального быстродействия.
Нетрудно заметить противоречивость приведенных требований. Например, обеспечение работы в интерактивно-управляемом режиме сопряжено со значительным снижением быстродействия вычислительного эксперимента. Это объясняется следующими основными причинами. Во-первых, непрерывный вывод на экран дисплея графической информации в большинстве случаев превышает время выполнения вычислительных операций. Во-вторых, предоставление возможности изменения параметров и структуры модели не целесообразно при использовании алгоритмической модели наивысшего уровня детализации, так как в этом случае любая корректировка влечет за собой полную перекомпиляцию модели и, следовательно, делает невозможным продолжение эксперимента с момента прерывания. Поэтому для реализации интерактивно-управляемого режима значительную часть работ по формированию дерева вычислений (алгоритмической модели) необходимо выполнять в ходе вычислительного эксперимента на каждом шаге дискретизации процессов во времени, что естественно приводит к увеличению затрат времени на вычислительный эксперимент.
Поэтому имеют место два направления компьютерной реализации постановки вычислительных экспериментов.
Программные средства первого направления на основании детализированной формы СММУ обеспечивают автоматическое формирование системы дифференциальных, алгебраических и логических уравнений, их сортировку и численное интегрирование одним из выбранных методов. Формирование и сортировка уравнений осуществляется на этапе планирования эксперимента, и повторяются лишь при интерактивной корректировке структуры модели. Результатом этого этапа, выполняемого в компилирующем режиме, является вычислительная модель табличной формы, обеспечивающая необходимую параметрическую корректировку, которая возможна за счет последующей работы программ в интерпретирующем режиме, когда обращение к массивам параметров модели осуществляется на каждом шаге интегрирования. Т.е. программные средства первого направления работают в комбинированном компилирующе-интегрирующем режиме.
Программные средства второго направления осуществляют автоматическое формирование разомкнутой алгоритмической модели, представляющей собой дерево вычислений, генерацию программы имитации в виде загрузочного модуля ( с расширением _.ехе) и выполнения этой программы. Т.е. здесь имеет место компилирующий режим работы.
Алгоритмы построения детализированных форм и алгебраических моделей рассмотрим после введения нетрадиционных средств описания динамических систем.
Представления моделей динамических систем методом структурных матриц
Аппарат структурных матриц, предложенный Л.Г. Шатихиным [11], позволяет в определенной степени объединить достоинства матричных методов и средств структурного представления динамических систем.
Определение структурной матрицы
Рассмотрим абстрактную алгебраизированную модель системы управления, представленную на рис. 4.2, а в форме графа, которому соответствует следующая система алгебраических уравнений:

(4.1)
Представим указанный граф на матричной сетке (рис. 4.2, б). Внутренние вершины графа изобразим в порядке следования на главной диагонали в квадратной части матрицы. Внешний узел x0 расположим над отдельным столбцом. Вместо дуг, соединяющих узлы, поставим угловые стрелки, которые изображают передачу между соответствующими диагональными элементами. Все это полностью отражает архитектонику графа.
Далее выполним следующие преобразования (см. рис. 4.2, в):
обозначение всех узлов вынесем наверх и расположим над соответствующими столбцами;
вместо удаленных с главной диагонали вершин графа в качестве символов поставим единицы;
вместо всех угловых стрелок запишем их обозначения (весовые коэффициенты связей aji), сохранив знаки;
столбец внешней переменной x0 перенесем вправо, как это принято в матричной записи для столбца свободных членов.

На полученном матричном изображении можно выделить те же три контура, которые имеются на графе. Контуры выделяются в соответствии с направлениями стрелок на рис. 4.1, б или в соответствии с индексами коэффициентов aji.
Знаки прямых и обратных связей на графе и в матрице совпадают. Таким образом, полученная матрица (рис.4.2, в) полностью отражает структуру системы управления, представленную графом (рис. 4.2, а), так как она имеет тот же состав элементов и связей между ними, что и на графе. Такую матрицу принято называть структурной матрицей системы [11].
В общем случае на главной диагонали структурной матрицы вместо единиц ставят их обозначения, принятые в матричной форме, то есть ajj. В результате получается окончательный вид структурной матрицы (рис.4.2, г).
Рассмотрим возможности применения структурных матриц для представления моделей динамических систем, а также для формирования детализированных форм и алгоритмических моделей.
При изображении математических моделей линейных непрерывных динамических систем в форме структурных матриц на главной диагонали размещаются собственные операторы передаточных функций Ajj(s), а ниже и выше главной диагонали - операторы Bji(s) связей между динамическими элементами. Операторы связей располагаются на пересечении столбца исходного j-го собственного оператора и строки конечного i-го собственного оператора. В соответствии с этим, структурная матрица простейшей системы, представленной на рис. 4.3 в виде направленного графа, принимает вид, указанный на рис 4.4., а, б.

Для представления детализированных форм описания линейных непрерывных моделей методом структурных матриц необходимо рассмотрение "внутренней структуры" каждого динамического звена.
То есть каждое звено необходимо представить в виде фрагмента структурной матрицы, в котором отдельные строка и столбец выделяются не только для каждой переменной или координаты, но и для каждой их производной. Причем диагональные элементы могут принимать только два значения: 1 или s (оператор Лапласа). Структурные матрицы, отвечающие этим требованиям, будем называтьдетализированными структурными матрицами.
Алгоритмизация получения таких матриц легко осуществляется с помощью методов представления передаточной функции n-го порядка в виде системы, включающей n дифференциальных уравнений первого порядка и одно алгебраическое выражение [2].
На рис.4.4 в качестве примера приведены различные формы представления математических моделей колебательного звена, в том числе и в виде детализированной структурной матрицы

Для нашего примера детализированная структурная матрица системы показана на рис. 4.5, в.

Сравнительный анализ двух вариантов представления структурных матриц системы (рис. 4.5, б, в) позволяет сформулировать алгоритм построения детализированной структурной матрицы
Диагональные элементы исходной структурной матрицы, представляющие собой знаменатели передаточных функций Aii(s) линейных динамических звеньев, единичные коэффициенты описания нелинейных макроветвей, или обозначения нелинейных макроузлов, замещаются импортированными из соответствующих библиотек фрагментами детализированных структурных матриц.
Недиагональные элементы, соответствующие числителям передаточных функций Bji(s), или идентификаторам нелинейных макроветвей, замещаются входными столбцами импортированных фрагментов структурных матриц.
Проверяются и, при необходимости, изменяются месторасположения коэффициентов безынерционных связей.
Алгоритмы формирования концептуальных и вычислительных моделей ЭМС
Начальный этап конструирования моделей в задачах моделирования и проектирования, как правило, связан с формированием первоначального образа объекта или системы. Здесь указываются основные составляющие части системы, взаимосвязи между ними, входы и выходы. То есть творческий процесс конструирования моделей начинается с построения так называемой концептуальной модели, которая отражает концепцию и принцип действия системы в представлении разработчика. Наиболее целесообразной формой первоначального представления моделей является графическая схема соединения составных частей системы, названных функциональными блоками. Функциональная схема, построенная на этом этапе, является первоначальным обликом проектируемого объекта. В зависимости от уровня детализации функциональных блоков, отражающих условия функционирования системы, концептуальная модель представляется на нескольких уровнях иерархии. Нижним уровнем представления концептуальной модели можно считать тот уровень, в котором принцип действия системы выявляется с полнотой, достаточной для конструирования моделей другого типа. Верхний уровень определяется основным назначением проектируемой или исследуемой системы. Это может быть как система управления крупным территориально распределенным объектом, так и система регулирования скорости электродвигателя. Однако, в любом случае, концептуальная модель внешне должна представляться единым способом - в виде функциональной схемы.
В качестве нижнего уровня концептуальной модели будем использовать структурную модель функционального уровня, в которой определены все характеристики и параметры объекта, необходимые для конструирования вычислительных моделей.
В общем случае моделирование следует рассматривать как одну из основных проектных процедур автоматизации проектирования ЭМС. Автоматизация всех проектных и исследовательских процедур и операций предусматривает постановку имитационных экспериментов с моделями объектов. Практически каждая проектная операция работает со своим вариантом представления модели объекта. В этой связи оказывается нецелесообразными попытки формирования единой вычислительной модели даже для сравнительно несложных объектов.
На первый взгляд выполнение преобразований различных видов моделей невозможно унифицировать, так как практически каждый вид модели имеет собственное присущее только ему внешнее представление, коренное изменение которого не желательно в силу его привлекательности у специалистов в области проектируемых объектов. Несомненно, что здесь первый план выдвигается требование унификации вычислительных процедур преобразования моделей, которое особо актуально для обеспечения необходимого быстродействия преобразования, особенно при функционировании компьютерного комплекса в режиме корпоративной сети. Следовательно, внутренне представление каждого вида моделей должно быть наиболее "доступно" вычислительной системе и должно быть получено при минимальных вычислительных затратах.
Традиционные вычислительные системы "научились" очень эффективно работать с матрицами, инженерам, пользователям этих систем, больше нравятся графические схемы. Поэтому, наиболее целесообразным будет использование матричного внутреннего представления всех видов моделей.
Матрично-структурным представлением концептуальной модели (МСП КМ) будем называть упорядоченный набор символьной и численной информации, однозначно определяющей элементный состав и топологию заданного уровня концептуальной модели. МСП КМ является единым универсальным средством идентификации в памяти ЭВМ схем концептуальных моделей всех уровней.
Матрично-структурной моделью (МСМ) будем называть совокупность данных, записанных в форме структурной матрицы, которые непосредственно могут быть использованы для планирования вычислительного процесса.
Если МСМ КП представляет собой некоторое отображение схем моделей, которые в любой момент могут быть выведены на экран монитора принтера или плоттера, то МСМ, как правило, не предоставляют пользователю своих графических аналогов, хотя они существуют и используются на этапе создания и испытания програмно-аппаратных средств.
Получение и преобразование детализированных форм концептуальных моделей
Нарисованная на экране монитора концептуальная модель является лишь внешней частью "айсберга" информации, которую в рамках поставленной задачи необходимо ввести пользователю, найти в электронных базах данных и моделей, преобразовать к виду, обеспечивающему эффективное выполнение вычислительного эксперимента. От того, какое выбрано изначальное "внутримашинное" представление моделей зависит сложность вычислительных процедур преобразования информации. В целях унификации проектных и исследовательских операций в работе для внутримашинного отображения моделей на всех уровнях от концептуальных до алгоритмических предлагается использовать единое матрично-структурное представление.
Процесс построения и преобразования концептуальных моделей к детализированному виду рассмотрим на примере электромеханического объекта - электропривода постоянного тока, приводящего в движение через механический редуктор тяжелую платформу. Функциональная схема такого объекта, построенная специалистом в области ЭМС, будет иметь вид, приведенный на рис. 5.1.

Здесь легко выделить три функциональных элемента:
преобразователь, осуществляющий управляемое преобразование электрической энергии;
двигатель, выполняющий преобразование электрической энергии в механическую - электромеханический преобразователь;
механизм, осуществляющий передачу механической энергии от вала двигателя через редуктор к рабочему органу - платформе.
В рассматриваемом примере возможно применение различных вариантов исполнения подсистемы "преобразователь - двигатель", а именно, на постоянном или на переменном токе. В дальнейшем будем использовать вариант построения электропривода по системе "тиристорный управляемый выпрямитель - двигатель постоянного тока".
С учетом выбранного варианта исполнения элементов конкретизируются их функциональные взаимосвязи, определяются координаты системы. Так для нашего примера концептуальная модель трансформируется в схему, приведенную на рис. 5.2, а, а ее матрично-структурное представление - на рис. 5.2, б

Выбор типа модели каждого функционального элемента обусловлен, прежде всего, тем, в какой проектной процедуре или операции она будет использована. Продолжая рассмотрение примера, допустим, что требуется получение модели объекта для анализа динамических процессов методом имитационных экспериментов.
В базе моделей первоначально выбираем функциональные блоки, содержащие внутреннее структурное представление узлов электропривода в виде L-моделей.
Причем для формирования следующего (нижнего) уровня концептуальной модели из базы моделей считываются не графические изображения внутренних схем функциональных блоков, а соответствующие им детализированные структурные матрицы. Для нашего примера L-модели двигателя и механизма и их детализированное матрично-структурное представление приведены на рис. 5.3 - 5.4. Преобразователь идентифицируется безынерционным звеном с коэффициентом передачи Кп.


Матрично-структурное представление структурной модели функционального уровня формируется путем замены диагональных блоков матриц верхнего уровня детализированными структурными матрицами физических элементов и необходимой корректировки связей. МСМ КП нижнего уровня для нашего примера приведено на рис. 5.5.

Рассмотренный пример показывает, что процесс построения детализированных форм концептуальных моделей заключается в выполнении определенного набора операций МСП КМ. Сформулируем формальные правила преобразования МСМ КМ для этапа получения детализированных форм концептуальных моделей.
Предварительно отметим, что матрично-структурное представление, как отдельного физического элемента, так и концептуальной модели системы на нижнем уровне имеют единую форму, которая приведена на рис. 5.6.

В общем случае можно утверждать, что прямоугольная матрица МСП S включает в себя два блока: квадратную матрицу взаимосвязей и параметров P и прямоугольную матрицу входных воздействий V, то есть
S = [P V]
(5.1)
Учитывая, что МСП КМ нижнего уровня представляет собой матричное отражение детализированного графа, введем следующие обозначения:
qz - суммарное число узлов детализированного графа, n - число интеграторов в детализированном графе, которое соответствует числу переменных состояния или порядку модели, r - число входных каналов объекта.
Тогда выделенные в (5.1) подматрицы будут иметь следующие размеры
P (q x q), V (q x r), где q = qz - r.
Продолжая рассмотрение содержания МСП КМ, можно отметить, что подматрица связей и параметров P содержит n строк, в состав каждой из которых входят только два ненулевых элемента
p(i,i) = s, p(i,i-1)=1, где i - номер строки s - оператор Лапласа.
Назовем эти строки строками призводных, столбцы матрицы P, в которых диагональный элемент p(j,j) = s, - столбцами переменных состояния, а предыдущие столбцы с (j-1) номерами - столбцами производных переменных состояния. Строку идентификации входных, выходных и промежуточных координат модели назовем строкой взаимосвязи h. Эта строка непосредственно не входит в состав структурной матрицы, записывается над ней в виде последовательного соединения срок идентификации подматриц P и V, то есть h = [hP hV].
Для обозначения структурных матриц функциональных элементов будем использовать верхний индекс, соответствующий номеру элемента в функциональной схеме. Верхним индексом (m) будет определять МСП КМ в целом.
Как следует из рассмотренных примеров, в состав МСП КМ нижнего уровня подматрицы P(k) включаются без изменений, а информация из подматриц V(k) распределяется по столбцам на матричном поле [P(m) V(m)]. Поэтому подматрицу V(k) будем записывать в виде столбцов, каждый из которых неразрывно связан с элементом строки взаимосвязи hV.
В соответствии с принятыми обозначениями алгоритм построения МСП КМ нижнего
![]()
уровня сводится к последовательному выполнению следующих действий.
С помощью прямого суммирования квадратных матриц P(k) для k =1, 2, ... , w, где w - число функциональных элементов концептуальной модели, выполняется первоначальное заполнение матрицы S0(m) т.е.
![]()
(5.2)
и формирование строки взаимосвязи
![]()
(5.3)
Путем анализа полученной строки взаимосвязей h(m) и схемы соединения функциональных элементов определяется местоположение j-то столбца подматрицы входов vj(k) каждого k-го элемента на матричной сетке S0(m).
Информация из столбцов vj(k) копируется в ячейки матрицы S0(m), расположенные на пересечении строк, соответствующих подматрице P(k) и столбцов, номера которых определены в п. 2.
МСП КМ нижнего уровня записывается как S(m) = [P(m) V(m)] и включает в себя квадратную подматрицу P(m) размером q(m) ґ q(m) и прямоугольную подматрицу или вектор V(m) размером q(m) ґ r(m). Здесь
![]()
Таким образом, процесс преобразования концептуальных моделей электромеханических систем сводится к рутинной процедуре обработки информации на матричной сетке, при выполнении которой
первоначальный облик модели исследуемого или проектируемого объекта (концептуальная модель верхнего уровня) задается и редактируется пользователем в графическом режиме;
выбор видов моделей функциональных элементов и установка взаимосвязей между ними выполняется в режиме интерактивного взаимодействия с вычислительной системой;
получение матрично-структурного представления концептуальной модели нижнего уровня осуществляется автоматически.
Матрично-структурные модели для имитации динамического поведения ЭМС
Как было отмечено ранее, имитационный эксперимент, подготовленный в целях анализа динамического поведения системы, может выполняться в комбинированном компилирующе-интерпретирующем или компилирующем режимах работы. В соответствии с этим можно выделить два вида МСМ, а именно:
дифференциальная матрично-структурная модель (ДМСМ),
алгебраическая матрично-структурная модель (АМСМ).
В совокупность данных ДМСМ кроме значений параметров, характеристик элементов и координат модели включаются производные последних. Параметры АМСМ вместо производных координат модели содержат их значения в дискретные моменты времени.
В свою очередь каждый вид МСМ подразделяется на две формы. Так ДМСМ может быть представлена как структурная матрица, соответствующая детализированному графу системы или как матрица дифференциальных и алгебраических уравнений, записанных в форме Коши. Для линейной непрерывной модели объекта первая форма дифференциальной матрично-структурной модели - ДМСМ_1 соответствует детализированной структурной матрице, а вторая форма ДМСМ_2 - векторно-матричной модели.
Таким образом, для изучения динамического поведения методом имитационных экспериментов системы, идентифицированной с помощью ДМСМ_2 необходимо выполнить численное интегрирование уравнений, записанных в каждой строке матрицы моделей.
При представлении системы с помощью ДМСМ_1 требуется предварительная сортировка уравнений матрицы, что соответствует преобразованию модели к ДМСМ_2.
Матрица первой формы алгебраической матрично-структурной модели АМСМ_1 соответствует детализированному графу системы, в котором непрерывные интеграторы заменены их дискретными аналогами в соответствии с выбранным методом численного интегрирования. Матрица второй формы алгебраической матрично-структурной модели АМСМ_2 соответствует дереву вычислений, полученному после преобразования АМСМ_1. АМСМ_2 используется для выполнения имитационного эксперимента, который сводится к последовательному вычислению алгебраических выражений, записанных в строках матрицы модели.
Таким образом, АМСМ_1 представляет собой матричную запись замкнутой алгебраической имитационной модели (АИМ) системы, а АМСМ_2 - разомкнутой АИМ.
Формирование матрично-структурной модели для комбинированного режима имитационного эксперимента
Исходной информацией для формирования матрично-структурной модели здесь является матричное отображение структурной модели математического уровня (СММУ). В общем случае СММУ представляет собой схему соединения динамических элементов, обеспечивающих свойства L- N- ND- NVS- моделей.
СММУ является в большинстве случаев результатом преобразования СМФУ, но может также вводиться пользователем.
СММУ, введенная пользователем, содержит линейные инерционные элементы, представленные произвольным видом передаточной функции. Поэтому для получения ДМСМ_1 необходимо выполнение отдельных операций преобразования.
Процесс преобразования СММУ в ДМСМ_1 сводится к декомпозиции линейных инерционных элементов на интеграторы и безынерционные звенья. Для алгоритмизации этой операции применяется универсальный метод разложения произвольной передаточной функции на n дифференциальных уравнений первого порядка и одно алгебраическое выражение (Метод Вульфсона [2]).


Элементы, обеспечивающие специфические свойства N-, ND-, и NVS-моделей, идентифицируются в ДМСМ списком:
{ind_class name_bl p1,p2,p3,... }
(6.1)
который включает в себя идентификатор класса (N, D, C, K, DA, Z, ...[1]), имя функционального элемента, значения параметров.
Формально ДМСМ_1 представляется также в виде матрицы
S = [P V]
(6.2)
включающей в себя два блока: квадратную матрицу взаимосвязей и параметров P и прямоугольную матрицу входных воздействий V.
На рис. 6.1 в качестве примера приведены СММУ электропривода постоянного тока с нереверсивным тиристорным управляемым выпрямителем [4], построенная и введенная пользователем. Матрично-структурное представление этой модели в форме ДМСМ_1. Представлено на рис. 6.2.
Анализ содержания рис. 6.1 - рис. 6.2. позволяет сформулировать алгоритм формирования ДМСМ_1, включающий в себя два этапа:
Согласно алгоритму построения структурных матриц для систем управления, изложенному в лекции 4, записывается матрично-структурное представление СММУ. При этом элементы, обеспечивающие специфические свойства N-, ND-, и NVS-моделей, рассматриваются как безынерционные звенья, коэффициенты передачи соответствуют списку (6.1).
Выполняется детализация МСП в соответствии с алгоритмом формирования детализированных структурных матриц.
Очевидно, что ДМСМ_1 непригодна для отправки на "переработку" процедурам численного интегрирования дифференциальных уравнений. Для получения корректных результатов имитационного эксперимента, уравнения, полученные непосредственно из строк матрицы ДМСМ_1, необходимо пересортировать в соответствии направлениями прохождения сигналов.
Это объясняется последовательным характером вычислений, выполняемых компьютером. Выполнение указанной операции приводит к формированию ДМСМ_2.
Процесс преобразования ДМСМ_1 к ДМСМ_2 очень близок по своей сути к процессу конструирования векторно-матричных моделей.
Непосредственное преобразование N-, ND-, и NVS-моделей в векторно-матричную модель не возможно, так как элементы, обеспечивающие специфические свойства N-, ND-, и NVS-моделей, нельзя идентифицировать неизменным значением коэффициента передачи KN. В этом случае с помощью второго этапа алгоритма конструирования ВММ формируется в табличном виде план вычислительного процесса, который и представляет собой ДМСМ_2.
Первоначально рассмотрим ход построения ДМСМ_2 на упрощенном примере, приведенном на рис. 6.3.
После исключения из детализированного графа ветвей с интеграторами выходы интеграторов становятся внешними входными воздействиями. Численные значения этих воздействий определяются значениями выходов соответствующих интеграторов на предыдущем шаге. Как правило, после выполнения указанной операции детализированный граф преобразуется в дерево вычислений. Если же после исключения интеграторов остаются замкнутые безынерционные контуры, следует принять меры для их исключения:
преобразовать исходную структурную модель системы;
воспользоваться средствами построения СММУ на языке математических уравнений, где предусмотрено численное решение алгебраических уравнений;
использовать АМСМ, которые обеспечивают развязку безынерционных контуров.
Граф-модель дерева вычислений, полученного для нашего упрощенного примера и соответствующая ему ДМСМ_2 приведены на рис. 6.4.

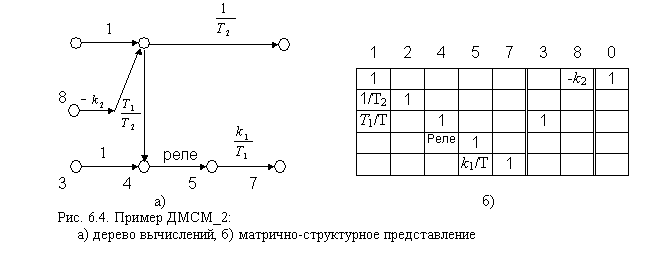
Сравнительный анализ обеих форм дифференциальных матрично-структурных моделей (ДМСМ_1 ДМСМ_2) позволяет определить основные этапы алгоритма конструирования ДМСМ_2.
Выполнение M1-преобразование ДМСМ_1, представленной матрицей SD1, для которого необходимо
идентифицировать в подматрице
 строки
производных и столбцы переменных
состояния;
строки
производных и столбцы переменных
состояния;столбцы переменных состояния переместить вправо за подматрицу
 ;
;из полученной матрицы
 удалить
строки производных.
удалить
строки производных.
В результате этого преобразования получается матрица вычислительной модели
![]()
(6.3)
которая
включает в себя квадратную
подматрицу ![]() размером
размером ![]() ,
прямоугольную подматрицу внешних
воздействий
,
прямоугольную подматрицу внешних
воздействий ![]() размером
размером ![]() и
прямоугольную подматрицу или
вектор
и
прямоугольную подматрицу или
вектор ![]() размером
размером ![]() .
Здесь
.
Здесь ![]() и
и ![]() .
.
Определение списка номеров Z ={z1, z2, ... ,zq2} строк матрицы SD2, указывающего очередность обработки уравнений, записанных в этих строках, которое заключается
в идентификации n строк матрицы SD2, соответствующих производным переменных состояния, и записи их номеров в конец списка Z на позиции c q2-n+1 по q2;
в последовательном заполнении освободившихся позиций списка номерами ближайших строк.
На основании информации, содержащейся в матрице SD2 и списке Z, формирование уравнений для дальнейшего использования их процедурами численного интегрирования.
Формально указанный алгоритм сводится к перестановке строк матрицы SD2, согласно списку Z, и стандартным вычислениям диагональных элементов модифицированной матрицы.
При использовании в качестве исходной информации концептуальной модели, построенной из типовых функциональных блоков, эффективность процесса конструирования ДМСМ_2 может быть также повышена за счет изменения общей схемы выполнения преобразований.
Если M1 - преобразование выполнить для каждого функционального блока и использовать полученные результаты для формирования ДМСМ_2, то уменьшится объем преобразуемой информации и снизятся затраты на преобразования.
В большинстве случаев результаты M1 - преобразования для типовых функциональных блоков целесообразно хранить базе моделей. В этом случае из процесса преобразования исключается этап формирования ДМСМ_1.
Матрично-структурные модели для имитации динамического поведения ЭМС. (продолжение)
Конструирование матрично-структурной модели для компилирующего режима имитационного эксперимента
Высокое быстродействие имитационного эксперимента в компилирующем режиме достигается применением оптимизированной схемы вычислений, в которой практически отсутствуют многократно повторяющиеся на каждом шаге дискретизации процессов операции. Это обусловлено использованием символьно-численных методов интегрирования дифференциальных уравнений.
Процесс предварительного формирования оптимизированной схемы или дерева вычислений выполняется в два этапа.
Непрерывные интеграторы, входящие в состав детализированного описания модели исследуемой системы заменяются дискретными аналогами.
Полученное описание модели, содержащее замкнутые контуры, преобразуется в дерево вычислений, которое в качестве внешних воздействий дополнительно содержит обобщенную предысторию входных и выходных сигналов дискретного интегратора.
Будем считать, что в результате выполнения каждого этапа должна быть построена и записана в матричной форме модель исследуемой системы, а именно, по результатам первого этапа - АМСМ_1, а по результатам второго этапа - АМСМ_2.
Дискретная модель интегратора полностью определяется формулой метода численного интегрирования. Для неявных методов [10], которые преимущественно используются для формирования алгебраических моделей, схема дискретного интегратора конструируется в соответствии с конечно разностным выражением вида:
![]()
(7.1)
и имеет вид, приведенный на рис. 7.1.
x (n+1),
u(n+1) -
сигналы на выходе и входе дискретного
интегратора в (n+1)-й
момент времени, kh -
коэффициент метода интегрирования, xu(n) -
обобщенная предыстория входных и
выходных сигналов, определяется методом
численного интегрирования.
(n+1),
u(n+1) -
сигналы на выходе и входе дискретного
интегратора в (n+1)-й
момент времени, kh -
коэффициент метода интегрирования, xu(n) -
обобщенная предыстория входных и
выходных сигналов, определяется методом
численного интегрирования.
Схемы дискретных интеграторов для многошаговых методов численного интегрирования Гира 2, 3 и 4 порядков и соответствующее им матрично-структурное представление приведены в таблице 7.1. МСП дискретной модели интегратора, представляющее собой строку Z, размер которой определяется порядком используемого метода интегрирования, будем считать элементарной ячейкой АМСМ первого уровня. То есть

Формирование дерева вычислений путем преобразования детализированного графа исследуемой системы в целом неэффективно, так как сопряжено с необходимостью обработки значительного числа замкнутых контуров. Это объясняется тем, детализация большинства динамических звеньев приводит к появлению в схеме дополнительных контуров, а следовательно к увеличению числа операций, необходимых для формирования дерева вычислений.
Дискретные интеграторы Гира
Таблица 7.1
Порядок |
Граф-схема |
Структурная матрица |
2 |
|
|
3 |
|
|
4 |
|
|






Поэтому оказывается целесообразным предварительное формирование разомкнутых алгоритмических имитационных моделей и соответствующих им структурных матриц для типовых динамических звеньев. Использование полученных матриц для конструирования АМСМ_1 позволяет тем самым исключить все возможные случаи увеличения числа контуров замкнутой алгебраической модели. А в тех случаях, когда нет необходимости в регистрации выходных сигналов отдельных элементов, будет целесообразным применение дополнительных преобразований модели в направлении увеличения порядка динамических элементов.
Пример формирования матрично-структурный моделей для апериодического звена приведен на рис. 7.2.


Элементарной ячейкой АМСМ второго уровня Ri будем считать МСП разомкнутой алгоритмической модели динамического звена.
Дальнейшее сокращение числа контуров достигается при использовании блочного принципа конструирования дерева вычислений. В этом случае для каждого функционального блока должна быть построена и занесена в базу моделей АМСМ_2. Для систем средней сложности число вычислительных операций сокращается при этом не менее чем на порядок.
Процесс блочного построения АМСМ_2 рассмотрим на примере линеаризованной модели электромеханического объекта, рассмотренной в лекции 6, используя дискретные интеграторы Гира 2-го порядка.
После замены непрерывных интеграторов их дискретными аналогами получаем АМСМ_1 для функциональных блоков. На рис. 7.3такая модель приведена для ФБ двигатель.
В результате преобразования АМСМ_1, которое может быть выполнено прямым методом с использованием формулы Мейсона, дерево вычислений и соответствующая ему АМСМ_2 для ФБ двигатель приведена на рис. 7.4.
Применение полученных результатов приводит к тому, что замкнутый N-граф модели электромеханического объекта (рис. 7.5) содержит только два контура.



Для формирования АМСМ_2 электромеханического объекта необходимо исключить указанные контуры. Эта операция выполняется прямым методом преобразования графа в дерево вычислений c использованием формулы Мейсона. Результат этих преобразований приведен на рис. 7.6. Здесь выражения для новых коэффициентов передач ветвей с учетом параметров АМСМ_1, приведенных на рис. 7.5, имеют следующий вид.

Сформулируем формальные правила блочного конструирования АМСМ сложных исследуемых систем. Предварительно отметим, что АМСМ_1 и АМСМ_2 как для отдельного элемента, так и для системы в целом имеют единую форму прямоугольной матрицы.
SA = [QA VA EA]
(7.2)
Матрица SA условно может быть разделена на три блока: квадратную подматрицу связей QA размером q ґ q, прямоугольную подматрицу внешних воздействий VA размером q ґ r и прямоугольную подматрицу входов предысторий дискретных интеграторов EAразмером q ґ qn. Здесь число строк q матрицы SA соответствует числу строк матрицы S, отображающей МСП детализированного графа исследуемой системы, число столбцов r подматрицы VA определяется числом входных каналов, а число столбцов qn = n pm. подматрицы EAопределяется числом интеграторов n в исходном детализированном графе и выбранным порядком метода интегрирования pm.
Таким образом, число строк матрицы SA совпадает с числом строк матрицы S.
Введем следующие обозначения. АМСМ_1 и АМСМ_2 отдельного функционального элемента будем обозначать соответственно, как
![]()
(7.3)
где i - порядковый номер функционального элемента. Алгебраические матрично-структурные модели исследуемой системы в целом обозначим
![]()
(7.4)
Если допустить, что концептуальная модель исследуемой системы построена в виде схемы соединения функциональных блоков, и для каждого из этих элементов путем обработки информации из базы моделей сформированаАМСМ_2, то алгоритм конструирования АМСМ_1 системы в целом можно представить в виде последовательного выполнения следующих операций.
С помощью прямого суммирования квадратных подматриц
 для i
=1, 2, ... , w, где w -
число функциональных элементов
концептуальной модели, выполняется
первоначальное заполнение матрицы
для i
=1, 2, ... , w, где w -
число функциональных элементов
концептуальной модели, выполняется
первоначальное заполнение матрицы  ,
т.е.
,
т.е.
![]()
(7.5)
и формирование строки взаимосвязи
![]()
(7.6)
Путем анализа полученной строки взаимосвязей
 и
схемы соединения функциональных
элементов определяется местоположение
столбцов подматрицы входов
и
схемы соединения функциональных
элементов определяется местоположение
столбцов подматрицы входов  и
подматрицы предысторий
и
подматрицы предысторий  каждого i-го
элемента на матричной сетке
каждого i-го
элемента на матричной сетке  .
.Информация из столбцов
 ,
копируется
в ячейки матрицы
,
расположенные на пересечении строк,
соответствующих подматрице
и
столбцов, номера которых определены в
п. 2.
,
копируется
в ячейки матрицы
,
расположенные на пересечении строк,
соответствующих подматрице
и
столбцов, номера которых определены в
п. 2.АМСМ_1 исследуемой системы записывается в виде матрицы размером q(m) ґ qZ. Здесь
![]()
(7.7)
Анализ предложенного алгоритма показывает, что для его реализации не требуется создания дополнительных вычислительных процедур, так как он практически повторяет алгоритм конструирования МСП КМ нижнего уровня.
На
этапе преобразования АМСМ_1 в АМСМ_2
выполняется топологический анализ
матрицы
с
целью поиска и исключения всех возможных
сочетаний замкнутых контуров и перерасчет
значений коэффициентов ветвей, входящих
в прямые пути передачи сигналов от
входных воздействий, выходных сигналов
и обобщенных предысторий i-го
дискретного интегратора к входу j-го
дискретного интегратора. Формально это
соответствует операции преобразования
подматрицы
в
треугольную матрицу ![]() и
операции перерасчета коэффициентов
матричных блоков
и
операции перерасчета коэффициентов
матричных блоков ![]() ,
, ![]() ,
по результатам которого формируется
подматрицы
,
по результатам которого формируется
подматрицы ![]() ,
.
Для выполнения указанной операции
разработан универсальный алгоритм,
позволяющий преобразовать
матрично-структурное представление
графа с контурами произвольной формы
в матрично струтурное представление
дерева вычислений, который будет
рассмотрен в следующей лекции.
,
.
Для выполнения указанной операции
разработан универсальный алгоритм,
позволяющий преобразовать
матрично-структурное представление
графа с контурами произвольной формы
в матрично струтурное представление
дерева вычислений, который будет
рассмотрен в следующей лекции.
Такое преобразование моделей, выполняемое на матричной сетке, будем называть M2-преобразованием, то есть
![]()
(7.8)
Следует отметить, что M2-преобразование не изменяет размер структурной матрицы, а сопровождается изменением значений отдельных коэффициентов.
Очевидно, что предложенные методы и алгоритмы конструирования АМСМ_1 и АМСМ_2 для сложных систем могут быть использованы:
для формирования АМСМ_2 нетиповых динамических звеньев (здесь в качестве блоков будут выступать элементарные ячейки АМСМ первого уровня);
для конструирования АМСМ_2 функциональных элементов (здесь в качестве блоков будут выступать элементарные ячейки АМСМ второго уровня Ri).
Это обстоятельство, позволяет в большинстве случаев отказаться от предварительного "ручного" формирования и последующего включения в базу моделей АМСМ_2 функциональных элементов. В этом случае виртуальное присутствие АМСМ_2 элемента. То есть в базе моделей хранится МСП детализированного графа функционального элемента, а при запросе АМСМ_2 для этого элемента выполняется ее автоматическое формирование при использовании значений заданных параметров.
Универсальный алгоритм автоматического построения дерева вычислений в задачах конструирования вычислительных моделей
Конструирование разомкнутых алгебраических матрично-структурных моделей требует решения проблемы формирования символьно-численных соотношений между любыми узлами графа произвольной сложности, представленного в виде структурной матрицы S.
Предлагаемый алгоритм автоматического формирования дерева вычислений основан на использовании алгоритма конструирования универсальной топологической формулы Мейсона [9] с помощью формул групп некасающихся контуров n-го порядка.
Компьютерная реализация универсальной топологической формулы Мейсона

(8.1)
позволяющая определить коэффициент передачи или передаточную функцию Hgy между любыми заданными узлами g, y графа, требует алгоритмизации задач вычисления главного D и частных dl определителей графа. Решению этих задач предшествует исследование топологии графа на предмет поиска комбинаций некасающихся контуров и прямых путей. Последнее в большинстве случаев выполняется путем полного перебора по узлам сравниваемых контуров. Попытаемся избежать этой длительной операции.
Если применить формулы групп некасающихся контуров n-го порядка, можно значительно упростить процедуру вычисления главного определителя D.
Группой с i-ым контуром или просто i-ой группой называется часть определителя графа, содержащая все некасающиеся сочетания с i-ым контуром первого порядка (все контуры n-го порядка для n=1, 2,..., в состав которых входит контур i-го порядка).
Формула для i-ой группы записывается в следующем виде
Di= -ki(1- ki+1(1- ki+2(...)-ki+m)- ki+2(1- ki+3(...)- ki+m)- ...- ki+m)
(8.2)
Первоначально рассмотрим алгоритмы решения отдельных задач.
Поиск контуров и путей графа
Исследование известных алгоритмов идентификации контуров графа показало, что при задании графа в виде структурной матрицы Sнаиболее рациональным является алгоритм "построения прадерева с корнем" [9].
Для реализации этого алгоритма будем использовать модифицированную матрицу смежности M [9]. Для структурной матрицы S1, внутренними элементами sji которой являются числовые коды ветвей графа, соответствующие, как правило, номерам передач этих ветвей, то можно утверждать, что
![]()
(8.3)
то есть модифицированная матрица смежности M получается путем транспонирования структурной матрицы S1 и последующего обнуления диагональных элементов квадратной части матрицы M.
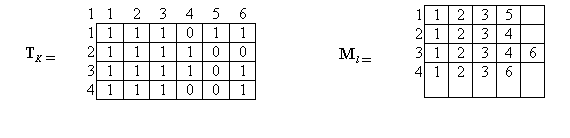
Для пояснения всех нижеизложенных алгоритмов будем использовать абстрактный граф, схема и МСП которого приведены на рис. 8.1.
С помощью выражения (8.3) получим модифицированную матрицу смежности M (рис. 8.2)


Теперь рассмотрим основные этапы идентификации контуров.
Последовательно, начиная с первой строки (i=1), осуществляем просмотр элементов матрицы M до встречи с элементом mij№0.
Переходим к j-ой строке матрицы M, указанной ее элементом не равным нулю mij№0.
Номера строк i, и столбцов j, соответствующие номерам узлов истока и стока ветви графа, и код этой ветви записываем в специальный блок цифровой информации. Эта операция соответствует последовательному вычерчиванию ветвей дерева, начинающегося с узла i.
Повторяем выполнение пунктов 1-3 до тех пор, пока не будут определены все возможные пути из узла i в узел i и построены все возможные тупиковые ветви.
Повторяем выполнение пунктов 1-4 для всех узлов исходного графа (i=2, 3, ... ), после вычеркивания из матрицы M (i-1) строки.
В результате получим прадерево с корнем, анализ которого позволит легко идентифицировать все контуры графа.

Фрагмент прадерева для узла 1 представлено на рис. 8.3 Непосредственный его анализ позволяет выделить три контура k1, k2, k3, связанных с узлом 1. Дальнейшие удаления из прадерева ветвей, инцидентных с узлами 1, 2, 3, ... позволяет выделить остальные контуры графа k4, k5, k6.
Результаты поиска контуров записываем в таблицу идентификации контуров и матрицу контуров на узлах графа Z, которые для нашего примера имеют вид:

Строки матрицы контуров на узлах графа соответствуют номерам контуров, а столбцы - номерам узлов.
Нетрудно заметить, что для идентификации контуров графа целесообразно использовать лишь квадратную часть модифицированной матрицы смежности.
Для выполнения процесса поиска путей нужно задать начальный xn и конечный xk узлы пути. В процессе идентификации путей сначала проводится сравнение j-го текущего узла с k-ым конечным узлом графа. Путь будет идентифицирован, если выполняется условиеj=k.
Результаты поиска путей записываем в таблицу идентификации путей и матрицу путей на узлах графа T, которые для нашего примера имеют вид

Формирование групп и определителя графа
Для формирования групп контуров графа первоначально необходимо определить пары некасающихся контуров. Очень часто принято результаты идентификации пар некасающихся контуров представлять в виде матрицы касаний контуров по два F2 [9]. Здесь строками и столбцами являются кодовые номера контуров графа. Если i-й контур графа имеют одну или более общих вершин с j-м контуром, т.е. являются касающимися, то элемент матрицы fij=1. В противном случае - fij=0.
Нужно заметить, что матрица F2 симметричная. Поэтому для получения информации о парах некасающихся контуров достаточно использовать лишь ее верхнюю или нижнюю треугольные части.
Матрица F2 определяется с помощью булева произведения матрицы Z на результат ее транспонирования Zт, то есть
![]()
(8.4)
Для
нашего примера верхняя треугольная
часть ![]() имеет
вид
имеет
вид
Ч тобы
сформировать формулу i-й
группы осуществляется последовательный
обход матрицы
от i-й
до последней строки, в ходе которого
путем поиска нулевых элементов матрицы
выполняется построение дерева сочетаний
некасающихся с i-м
контуром контуров графа. Обход последнего
дерева позволит сформировать формулы i-й
группы Di.
тобы
сформировать формулу i-й
группы осуществляется последовательный
обход матрицы
от i-й
до последней строки, в ходе которого
путем поиска нулевых элементов матрицы
выполняется построение дерева сочетаний
некасающихся с i-м
контуром контуров графа. Обход последнего
дерева позволит сформировать формулы i-й
группы Di.
На рис. 8.4 представлены деревья сочетаний некасающихся контуров и формулы всех групп контуров.

При известных формулах всех n-групп контуров определитель графа вычисляется с помощью выражения
![]()
(8.5)
Алгоритмизация выражения (8.5) осуществляется последовательным наращиванием формулы на каждом этапе формирования i-й группы.
Вычисление частных определителей
Формулы для частных определителей dl могут также быть сформированы с использованием полных и усеченных формул i-х групп.
Первоначально необходимо для выделенного l-го пути определить множество контуров {Мl}, касающихся с l-м путем, в которое включаются номера этих контуров, число которых kl не больше общего числа контуров, и определить контур с максимальным порядковым номером kО[1, n].
Если i
> k и ![]() ,
то используется усеченная формула,
которая получается из полной формулы
путем удаления всех контуров,
касающихся l-го
пути. То есть
,
то используется усеченная формула,
которая получается из полной формулы
путем удаления всех контуров,
касающихся l-го
пути. То есть
![]()
(8.6)
Алгоритмизация выражения (8.6) осуществляется следующим образом.
Путем вычисления булева произведения матрицы путей на узлах графа T на транспортированную матрицу контуров на узлах ZTформируем матрицу касаний путей с контурами Tk, т. е.
![]()
(8.7)
Последовательно просматривая l-ю строку матрицы Tk, формируем множество контуров, касающихся с l-м путем {Мl}, каждый элемент которого является номером столбца j матрицы E при elj = 0.
Конструируются формулы полных и усеченных групп и вычисляют частный определитель dl, согласно выражению (8.6).
Пункты 2, 3 выполняются для всех контуров исходного графа.
Матрица касания прямых путей Tk от внешних узлов к вершине l с контурами исходного графа (рис. 8.1) и множество {Мl} имеют вид:
Тогда частные определители dl, (l=1, 2, 3, 4) формируются следующим образом:
К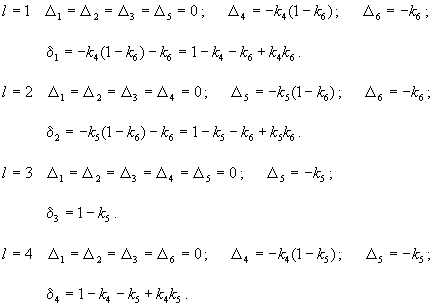 огда
определены прямые пути передачи внешних
сигналов к узлу l и
построены формулы вычисления главного
и частных определителей исходного
графа, процесс построения дерева
вычислений представляет собой
последовательность следующих действий.
огда
определены прямые пути передачи внешних
сигналов к узлу l и
построены формулы вычисления главного
и частных определителей исходного
графа, процесс построения дерева
вычислений представляет собой
последовательность следующих действий.
Конструирование формулы вычисления передач внешних сигналов к первоначально выбранному узлу x графа Q1, Q2, ..., Qr, где r - число внешних сигналов.
Упрощение исходного графа путем исключения из него ветвей, входящих в узел x, перевод узла в группу внешних сигналов.
Последовательное приведение графа к дереву вычислений путем конструирования формул передач внешних и, переведенных во внешние, сигналов к выбранным узлам графа.
Выполнение указанной последовательности действий приведет к преобразованию исходного графа (рис.8.1) в дерево, представленное на рис. 8.5.

Структурные модели элементов и подсистем электропривода
Неотъемлемыми составными частями современных электромеханических систем являйся электродвигательные, преобразовательные, управляющие устройства, передаточные и исполнительные механизмы. Большинство указанных устройств имеют типовые схемные решения и изменений в процессе проектирования и исследования ЭМС не претерпевают. Однако качество результатов проектирования и скорость их получения определяются уровнем математических моделей их точность и адекватностью реальным устройствам.
В завершающих лекциях первой части курса рассмотрим методы построения структурных моделей электродвигателей, преобразователей и регуляторов для электропривода постоянного тока. При представлении моделей будем использовать аппарат функциональных блоков, представленный в лекции №3. Для достижения большей наглядности далее будем использовать несколько избыточное число макроблоков. Поэтому на практике не следует жестко придерживаться приведенных здесь структур моделей.
Структурные модели электродвигателей постоянного тока независимого возбуждения
Математическое описание динамических режимов электродвигателей постоянного тока независимого возбуждения (ЭДПТ НВ) может быть получено на основании обобщенных уравнений электромеханического преобразования энергии [13].
Рассматривая двигатель как элемент электромеханической системы, целесообразно механическую инерцию ротора и момент потерь на его валу отнести к механической части системы, считая механическими переменными электромагнитный момент двигателя M и скорость вращения его ротора W.
Гипотетически ЭДПТ НВ можно разделить на три узла: вращающийся совместно с рабочей машиной ротор, якорная цепь, цепь возбуждения. Тогда структурная модель функционального уровня электродвигателя принимает вид, показанный на рис. 9.1

Динамика механической части системы "двигатель - рабочая машина" описывается упрощенным уравнением движения:
![]()
(9.1)
где МС - приведенный момент статического сопротивления.
У равнение
(9.1)
позволяет представить механическую
часть в виде функционального блока MHN,
схема которого приведена на рис.
9.2.
равнение
(9.1)
позволяет представить механическую
часть в виде функционального блока MHN,
схема которого приведена на рис.
9.2.
Процессы электромеханического преобразования энергии в ЭДПТ НВ описываются уравнениями баланса напряжения в якорной цепи и цепи возбуждения и являются основой для построения внутренних схем блоков Q и F.
Указанные уравнения имеют следующий вид:
для якорной цепи:

(9.2)
г де Uя -
напряжение, приложенное к обмотке
якоря, Lя ,
Rя -
индуктивность и активное сопротивления
обмотки, E -
ЭДС двигателя, Ф -
магнитный поток возбуждения, k -
конструктивный коэффициент двигателя.
де Uя -
напряжение, приложенное к обмотке
якоря, Lя ,
Rя -
индуктивность и активное сопротивления
обмотки, E -
ЭДС двигателя, Ф -
магнитный поток возбуждения, k -
конструктивный коэффициент двигателя.
для цепи возбуждения:

(9.3)
где UВ - напряжение, приложенное к обмотке возбуждения, LВ, RВ - индуктивность и активное сопротивления обмотки.
Для
построения структурных моделей
блоков Q и Fпреобразуем
уравнения (9.2)
- (9.3)
при одновременной подстановке ![]() .
.

(9.4)
![]()
(9.5)
где ![]() -
электромагнитная постоянная якорной
цепи двигателя.
-
электромагнитная постоянная якорной
цепи двигателя.
В соответствии с уравнениями
(9.4)
- (9.5)
внутренние схемы функциональных
блоков Q и F принимают
вид, приведенный на рис.
9.3.
и F принимают
вид, приведенный на рис.
9.3.
При неизменном магнитном потоке (Ф=const) структурная модель структурная модель ФБ Q значительно упрощается (рис. 9.4), а ФБ F становится ненужным. В этом случае вместо произведения переменных вводится постоянный коэффициент
![]()
и вся модель ЭДПТ НВ будет содержать лишь четыре базовых динамических элемента.
Не изменяя обобщенную схему СМФУ, можно построить множество вариантов структурных моделей электродвигателя, в том числе и при учете упругих свойств передаточных устройств, люфтов и зазоров в них.
В качестве примера рассмотрим вариант модели ФБ F, позволяющей более корректно имитировать процессы в обмотке возбуждения. Если учесть, что индуктивность обмотки возбуждения определяется выражением
![]()
(9.6)
где pВ - число пар полюсов, wВ - число витков, s - коэффициент рассеяния обмотки возбуждения, уравнения баланса напряжений принимает вид:
![]()
(9.7)
Применяя к (9.7) преобразование Лапласа с учетом начальных условий, получим
![]()
(9.8)
откуда
![]()
(9.9)
Выражению
(9.9)
будет соответствовать структурная
модель ФБ F1,
приведенная на рис.
9.5 Здесь для
получения мгновенных значений тока
возбуждения используется таблично
заданная зависимость ![]() .
.

Структурные модели аналоговых регуляторов
Используемые
в системах автоматического управления
аналоговые регуляторы конструируются
на базе операционных усилителей (ОУ)
постоянного тока. Так как операционный
усилитель без обратной связи имеет
очень большой коэффициент усиления,
потенциал входного зажима усилителя
близок к потенциалу земли. Можно считать,
что все входное напряжение Uвх приложено
на входную цепь, а выходное напряжение Uвых -
на цепь обратной связи, то есть ![]() .
Ввиду того, что операционный усилитель
практически не потребляет тока, можно
считать без учета инвертирования
.
Ввиду того, что операционный усилитель
практически не потребляет тока, можно
считать без учета инвертирования ![]() .
Поэтому передаточная функция ОУ
определяется на основании схемы
соединения входных цепей и цепей обратных
связей.
.
Поэтому передаточная функция ОУ
определяется на основании схемы
соединения входных цепей и цепей обратных
связей.
![]()
Из выше изложенного следует, что проблем построения линейных структурных моделей аналоговых регуляторов не существует. На практике выходное напряжение таких регуляторов всегда принудительно и естественно ограничивается некоторым пороговым значением. Учет этих нелинейных свойств путем подключения на выход линейной модели звена "Ограничение" приводит к некорректным результатам моделирования.
Как построить корректную модель рассмотрим на примере ПИ-регулятора с ограничением.
Структурная модель ПИ-регулятора с ограничением.
Упрощенная функциональная схема регулятора приведена на рис. 9.6.
В ыходное
напряжение U2 ограничивается
значениями напряжений ±UV пробоя
стабилитронов V1, V2.
При достижении напряжения U2 значений
±UV операционный усилитель регулятора
закорачиватся, а кондесатор цепи обратной
связи заряжается до напряжения ±UV.
ыходное
напряжение U2 ограничивается
значениями напряжений ±UV пробоя
стабилитронов V1, V2.
При достижении напряжения U2 значений
±UV операционный усилитель регулятора
закорачиватся, а кондесатор цепи обратной
связи заряжается до напряжения ±UV.
Определим выражения для коэффициента передачи регулятора K, постоянной времени T регулятора и постоянной времени обратной связи Т1, как
![]()
Алгоритм функционирования ПИ-регулятора математически можно записать следующим образом.
Если ![]() ,
то
,
то ![]() ,
иначе, когда
,
иначе, когда ![]() -
- ![]() .
.
Структурная реализация приведенного алгоритма осуществляется с помощью модели переменной структуры, в которой при достижении выходного напряжения пороговых значений отключается вход интегратора и замыкается цепь дозаряда конденсатора в обратной связи. Внутренняя схема функционального блока, представляющего собой макромодель ПИ-регулятора с ограничением приведена рис. 9.7.
В целях верификации модели выберем следующие значения параметров K = 4, T = 0.1 с, ±U = ±8 В, а тестовый входной сигнал X(t) сформируем с помощью элементов задания внешних воздействий в виде, приведенном на первом графике рис. 9.8. Результаты имитационного эксперимента, представленные на втором графике рис. 9.8 в виде кривой изменения выходного сигнала Y(t), подтверждают возможность воспроизведения реальных динамических процессов в аналоговом ПИ-регуляторе с помощью модели переменной структуры.


продолжение...
Структурные модели элементов и подсистем электропривода. (продолжение)
Структурные модели элементов электромеханических систем с тиристорными управляемыми выпрямителями
Современные электромеханические системы обеспечивают автоматическое управление технологическими машинами и агрегатами. При использовании в качестве исполнительного органа электродвигателя постоянного тока наилучшие статические и динамические характеристики получаются при изменении напряжения якорной цепи. Поэтому наибольшее применение для этих целей нашли системы со статическими преобразователями напряжения, в частности с тиристорными управляемыми выпрямителями (ТУВ). Наличие определенной специфики электромеханического преобразования энергии и процессов регулирования координат ЭМС с ТУВ требуют специального рассмотрения вопросов имитационного моделирования таких объектов.
Предлагаемая методика моделирования позволяет учитывать основные специфические свойства ТУВ как элемента динамической системы - дискретный характер управления, неполную управляемость вентилей, нелинейность характеристик управления, наличие пульсаций напряжения и тока нагрузки без рассмотрения процессов в каждом вентиле, а также обеспечивает корректную имитацию динамических процессов в режимах непрерывного и прерывистого токов нагрузки.
Алгоритм воспроизведения реальных динамических процессов в системах с ТУВ предлагается разделить на два этапа:
Непрерывный сигнал управления Uу преобразуется в сетчатую функцию угла открывания тиристоров aj (j=0,1,2,...), в соответствии с которойиз отрезков синусоид напряжения питающей сети формируется т.н. внутренняя ЭДС управляемого выпрямителя
 .
Физическим аналогом этой ЭДС является
напряжение на нагрузке при бесконечной
индуктивности (Lн=Ґ)
и идеальном силовом трансформаторе.
.
Физическим аналогом этой ЭДС является
напряжение на нагрузке при бесконечной
индуктивности (Lн=Ґ)
и идеальном силовом трансформаторе.При выполнении условия протекания тока в нагрузке, когда сумма внутренней ЭДС и ЭДС нагрузки
 положительна,
вычисляется его значение, которое
соответствует реальному.
положительна,
вычисляется его значение, которое
соответствует реальному.
Для
применения приведенного алгоритма в
библиотеку типовых нелинейных элементов
включено звено "Управляемый
выпрямитель", в котором программно
реализовано математическое описание
зависимости ![]() для
симметричных схем ТУВ с числом фаз m=2,3,6
при следующих основных допущениях:
для
симметричных схем ТУВ с числом фаз m=2,3,6
при следующих основных допущениях:
вентили являются идеальными ключами, открывающимися при подаче управляющего импульса и наличии положительного прямого напряжения;
управление вентилями осуществляется "широкими" импульсами, но не шире интервала дискретности;
Т
 УВ
выполнен по бестрансформаторному
варианту.
УВ
выполнен по бестрансформаторному
варианту.
Для получения реальной картины динамических процессов в системе "тиристорный управляемый выпрямитель - нагрузка" (ТУВ - Н) воспользуемся схемой замещения (рис. 10.1). В общем случае характер нагрузки, подключенной к ТУВ, представим с помощью некоторого комплексного сопротивления Zн(s) и ЭДС нагрузки EН, а вентильные свойства преобразователя учитывает идеальный вентиль V
Тогда уравнения для вычисления тока нагрузки будет иметь вид:
![]()
(10.1)
где S(iн) - переключающая функция, учитывающая прерывание тока в нагрузке и равная 1 при iн(t)>0 и 0 при iн(t)=0
Вентильные свойства ТУВ обусловливают режим прерывания тока, когда сумма внутренней ЭДС, противоЭДС нагрузки и запаса реактивной энергии становится отрицательной. Это обстоятельство требует построения модели переменной структуры, подключающей внутреннюю ЭДС ТУВ к нагрузке при выполнении одного из следующих условий:

(10.2)
В соответствии с приведенными выше рассуждениями структурная модель нереверсивного ТУВ принимает вид, показанный на рис. 10.2.

При использовании в качестве нагрузки электродвигателя постоянного тока независимого возбуждения в его модель следует внести некоторые изменения, а именно, разомкнуть обратную связь по противоЭДС . Модифицированная схема модели двигателя при постоянном магнитном потоке приведена на рис. 10.3.
Составим из представленных функциональных блоков структурную модель функционального уровня системы "Нереверсивный ТУВ - электродвигатель постоянного тока". Результаты построения модели приведены на рис. 10.4. Имитационные эксперименты с этой моделью, результаты которых в виде графиков напряжения на нагрузке, тока и скорости двигателя представлены на рис 10.5, подтверждают методики моделирования систем с тиристорными управляемыми выпрямителями
Таким образом, с использованием специально созданного нелинейного динамического элемента "Управляемый выпрямитель" могут быть построены структурные модели самых различных схем и конфигурации систем с тиристоными управляемыми выпрямителями.


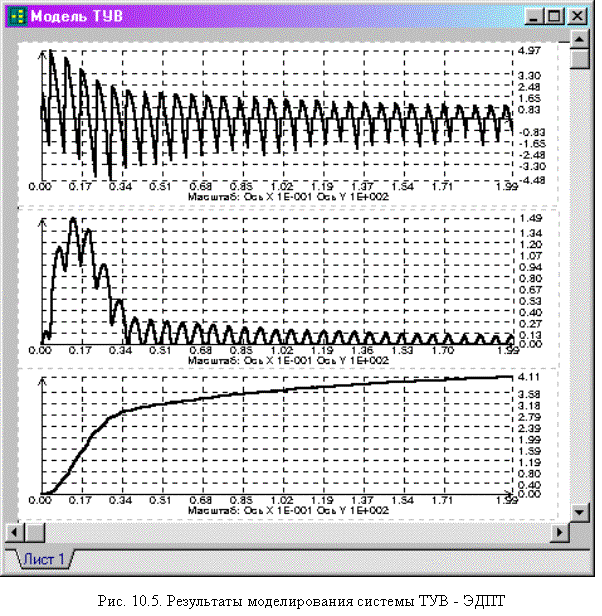
Рекомендуемая литература
Автоматизация моделирования и функционального проектирования электромеханических систем: Учеб. пособие,/ А.В. Балуев, М.Ю. Дурдин, А.Р. Колганов: Иван. гос. энерг ун-т.- Иваново, 1993 - 84 с.
Вульфсон А.В. О построении программы, автоматизирующей расчет на ЦВМ переходных процессов нелинейных автоматических систем. //Изв. вузов. Электромеханика, 1969, №12. с. 25-32.
Киндлер Е. Языки моделирования: Пер. с чеш. М.: Энергоатомиздат, 1985.- 288 с.
Колганов А.Р., Пантелеев Е.Р. Имитационное моделирование динамических систем в САПР: Учеб. пособие: Иван. энерг. ин-т. - Иваново, 1990 - 88 с.
Колганов А.Р., Семашко В.А. Графический редактор структурных моделей электромеханических систем: Методические указания для студентов/ Иван. гос. энерг. ун-т. - Иваново,1999. - 28 с.
Колганов А.Р., Таланов В.В. Компьютерный комплекс имитационного моделирования динамических систем: Практ. пособие/ Иван. гос. энерг. ун-т. - Иваново,1997. - 76 с.
Нуждин В.Н. Автоматизация проектирования и исследования электроприводов. ч.2 Автоматизация моделирования. - Иваново: ИвГУ, 1980.- 95 с.
Нуждин В.Н. Концептуальное программирование вычислительных моделей. - Иваново: ИЭИ, 1985.- 32 с.
Усенко В.В. Алгоритмизация структурного анализа систем управления. М.: МЭИ, 1990.- 59 с.
Хемминг Р.В. Численные методы для научных работников и инженеров / Пер. с англ. Под ред. Р. С. Гутера.- М.: Наука,- 1972.- 400 с.
Шатихин Л.Г. Структурные матрицы и их применение для исследования систем. - М.: Машиностроение, 1991.- 256 с.
Шеннон Р. Имитационное моделирование систем: Искусство и наука / Пер. с англ. -М.: Мир, 1978. - 400 с.
Ключев В.И. Теория электропривода. - М.: Энергоатомиздат, 1985. - 560 с.
Ивановский государственный энергетический университет
Кафедра электропривода и автоматизации промышленных установок
Электронный конспект лекций
по курсу
«МОДЕЛИРОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ»
Часть 2
Колганов Алексей Руфимович,
доктор технических наук, профессор кафедры
«Электропривод и автоматизация промышленных установок»
Ивановского государственного энергетического университета
Тел. (0932) 385795, (0932) 419063
klgn@drive.ispu.ru
klgn@indi.ru
Лекция No 1.
Тема: «Введение. Цели и задачи второй части курса»
В первой части курса «Моделирование электромеханических систем» изложены теоретические вопросы, относящиеся к следующим учебным блокам курса:
Концепция структурного моделирования электромеханических систем.
Алгоритмы формирования концептуальных и вычислительных моделей динамических систем.
Методы построения структурных моделей элементов и подсистем электропривода.
Закрепление теоретического материала первой части курса предусматривает выполнение лабораторного практикума, ориентированного на решение практических задач моделирования электропривода постоянного тока.
Однако современные тенденции развития электропривода и электромеханических систем основываются на всестороннем использовании регулируемого электропривода, построенного на базе электродвигателей переменного тока (асинхронных, синхронных) или так называемых вентильных электродвигателей.
Поэтому, первым учебным блоком второй части курса «Моделирование электромеханических систем» будет блок «Построение и реализация структурных моделей электромеханического и электрического преобразования энергии в системах электропривода».
Здесь на основании теории обобщенной электрической машины будут рассмотрены методы построения и реализации в среде компьютерного комплекса IDS 1.0 [8] структурных моделей электродвигателей. Основное внимание будет уделено рассмотрению вариантов моделирования асинхронных электродвигателей. Указанный материал излагается в лекциях No 2 – 7. Будут также рассмотрены алгоритмы построения структурных моделей автономного инвертора напряжения (АИН) как основного преобразовательного устройства, применяемого для регулирования скорости электродвигателей переменного тока (лекции 8, 9).
Для практического закрепления теоретического материала указанного учебного блока разработан лабораторный практикум, основное содержание которого приведено в [3].
Изучение указанного блока является завершающим этапом рассмотрения вопросов теоретических вопросов и практической реализации одной из основных проектных процедур этапа функционального проектирования ЭМС – процедуры анализа.
Вспомним, что такое функциональное проектирование. Это комплекс трудоемких задач, связанных с определением принципов построения объектов проектирования и оценкой их свойств на основе исследования процессов их функционирования. Автоматизация функционального проектирования предполагает решение этих задач путем проведения вычислительных экспериментов с использованием различных видов математических моделей этих объектов.
Этап функционального проектирования электромеханических систем наиболее трудоемок и плохоформализуем. Он связан с творческим процессом выбора типа электропривода, схемных решений электродвигательных, преобразовательных и управляющих устройств, многовариантным анализом динамических режимов, испытанием системы в нормальных и экстремальных режимах. Поэтому возникает необходимость обобщенного представления электромеханической системы с точки зрения задач функционального проектирования.
Детальное рассмотрение задач функционального проектирования ЭМС показывает, что они не могут быть решены только с использованием структурных моделей. В этой связи появляется необходимость поиска оптимальных связок «проектная операция – математическая модель», определения необходимого состава видов моделей, выбора видов моделей, ориентированных на пользователя и вычислительную систему.
Многообразие задач функционального проектирования и видов используемых математических моделей обусловливает необходимость создание единой методики их использования.
Поэтому, заключительный учебный блок курса будет носить название «Технологическая схема и алгоритмический базис функционального проектирования электромеханических систем».
Основное содержание блока изложено в лекциях 10 – 14. Здесь рассмотрены вопросы единого представления ЭМС в виде трехуровневой иерархической системы, определены необходимые для решения всего комплекса задач функционального проектирования виды математических моделей, изложены основные направления конструирования этих моделей, представлена технология функционального проектирования ЭМС.
Содержание тем лекций второй части электронного курса «Моделирование электромеханических систем» приведено ниже в таблице.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
Гладкий А.В. Множеств теория. - В кн.: Энциклопедия кибернетики, т.2.- Гл. редакция УСЭ, Киев: 1975.- с.17-20.
Ключев В.И. Теория электропривода. – М.: Энергоатомиздат, 1985. – 560 с.
Колганов А.Р. Моделирование электромеханических систем: Методические указания к лабораторному практикуму/ Иван. гос. энерг. ун-т. - Иваново, 2001. - 24 с.
Колганов А.Р. Моделирование электромеханических систем: Методические указания и контрольные задания для студентов заочного факультета специальности 1804 00/ Иван. гос. энерг. ун-т. - Иваново, 2003. - 32 с.
Колганов А.Р., Буренин С.В. Алгоритмы и программы функционального проектирования систем управления электромеханическими объектами: Учеб. пособие/ Иван. гос. энерг. ун-т. - Иваново, 1997. - 140 с.
Колганов А.Р., Комаров А.Б. Компьютерный комплекс функционального проектирования систем управления динамическими объектами: Практ. пособие/ Иван. гос. энерг. ун-т. - Иваново, 2001. - 60 с.
Колганов А.Р., Пантелеев Е.Р. Имитационное моделирование динамических систем в САПР: Учеб. пособие: Иван. энерг. ин-т. - Иваново, 1990 - 88 с.
Колганов А.Р., Таланов В.В. Компьютерный комплекс имитационного моделирования динамических систем: Практ. пособие/ Иван. гос. энерг. ун-т. - Иваново, 1997. - 76 с.
Кухтенко А.И. Систем общая теория. В.кн. Энциклопедия кибернетики. т.2.- Гл.редакция УСЭ, Киев: 1975.- с. 335-339.
Месарович М., Мако Д., Такахара Н. Теория иерархических многоуровневых систем. - М.: Мир, 1973. 344 с.
Системы автоматизированного проектирования: Учебное пособие для втузов: В 9 кн. Кн. 1. Принципы построения и структура. И.П. Норенков.- М.: Высш.шк., 1986.- 127 с.
Шеннон Р. Имитационное моделирование систем: Искусство и наука / Пер. с англ. -М.: Мир, 1978. - 400 с.
Лекция No 2.
Тема: «Краткие сведения из теории обобщенной электрической машины»
Рассматривая
двигатель как элемент электромеханической
системы, целесообразно механическую
инерцию ротора и момент потерь на его
валу отнести к механической части
системы, считая механическими переменными
электромагнитный момент двигателя М и
скорость его ротора ![]() .
.

Рис. 2.1. Электромеханический многополюсник
Этому условию соответствует представление двигателя в виде электромеханического многополюсника [2] (рис. 2.1), имеющего пар электрических зажимов, соответствующих обмоткам двигателя, к которым подведены напряжения u1, u2,…, un, и одну пару механических зажимов, представляющих безынерционный ротор двигателя, на котором при скорости в результате электромеханического преобразования энергии развивается электромагнитный момент М.
Переменные М, связывают электромеханический преобразователь с механической частью системы, а напряжения u1, u2,…, un – с системой управления электроприводом.
Для построения математического описания динамических процессов в электродвигательных устройствах любого типа (постоянного и переменного тока) используются элементы теории обобщенной электрической машины [2]. Без ее использования практически невозможно построить модель электродвигателей переменного тока.
Известно [2], что любая многофазная электрическая машина с n–фазной обмоткой статора и m–фазной обмоткой ротора при условии равенства полных сопротивлений фаз статора (ротора) для изучения динамических процессов может быть представлена эквивалентной двухфазной машиной.
Понятие обобщенной электрической машины
Обобщенная машина является упрощенной моделью реальной машины. Ее отличительными признаками являются:
Сосредоточенные в пазах проводники стоком заменены синусоидальными токовыми слоями, эквивалентными по магнитодинамической силе (МДС) первым гармоникам МДС соответствующих реальных обмоток.
Не учитывается неравномерность воздушного зазора, обусловленная пазами.
Наличие явнополюсной структуры на статоре (роторе) учитывается введением первой гармоники переменной составляющей зазора.
Магнитная цепь имеет очень высокую магнитную проницаемость и не насыщается, то есть считается, что энергия магнитного поля сосредоточена в воздушном зазоре. Влияние явнополюсности учитывается введением переменной радиальной магнитной проницаемости [2]
-

(2.1)
где
![]()
-
соответственно электрической и
геометрический угол поворота ротора
относительно статора; ![]() -
число пар полюсов машины.
-
число пар полюсов машины.
Полные сопротивления фаз статора и ротора равны.
Математическое описание процессов электромеханического преобразования энергии в обобщенной машине
Обобщенная электрическая машина может быть представлена схемой приведенной на рис. 2.2. Две обмотки статора размещены в ортогональной системе координат , неподвижной относительно статора, а две обмотки ротора – в ортогональной системе координат d, q, неподвижной относительно ротора.

Рис. 2.2. Схема обобщенной машины
Для координат и параметров обобщенной машины будем использовать следующую систему индексов. Индексами 1 и 2 будем обозначать координаты и параметры, относящиеся соответственно к статору и ротору; индексы , d, q определяют принадлежность координат к соответствующей оси машины.
Динамика обобщенной электрической машины описывается четырьмя уравнениями электрического равновесия в цепях ее обмоток и уравнением электромеханического преобразования энергии. Уравнения электрического равновесия, выраженные через потокосцепления, и записанные относительно реальных напряжений и токов статора и ротора
![]()
имеют вид:
|
(2.2) |

где ![]() –
активное сопротивление одной фазы
статора (ротора),
–
активное сопротивление одной фазы
статора (ротора), ![]() -
потокосцепления соответствующих
индексам обмоток.
-
потокосцепления соответствующих
индексам обмоток.
Уравнения (2.2) однотипны и их можно записать в компактной обобщающей форме:
|
(2.3) |
где
индекс i принимает
значения ![]() 2d,
2q, соответствующие
индексам обмоток.
2d,
2q, соответствующие
индексам обмоток.
Потокосцепления обмоток в общем виде определяются результирующим действием токов всех обмоток машины:
|
(2.4) |
Здесь для собственных и взаимных индуктивностей обмоток принято одинаковое обозначение с подстрочным индексом, первая часть которого i= 2d, 2q, указывает, в какой обмотке наводится ЭДС, а вторая j= 2d, 2q, - током какой обмотки она создается.
Однотипность записи уравнений (2.4) позволяет в дальнейшем прибегнуть к удобной обобщенной форме записи этой системы
|
(2.5) |
При работе машины взаимное положение обмоток статора и ротора изменяется, поэтому собственные и взаимные индуктивности обмоток в общем случае являются функцией угла поворота ротора
![]() .
.
Для симметричной неянополюсной машины собственные индуктивности статора и ротора не зависят от положения ротора
![]() ,
,
а взаимные индуктивности между обмотками статора или ротора равны нулю
![]() ,
,
так как магнитные оси этих обмоток сдвинуты в пространстве на угол
![]() .
.
Взаимные индуктивности обмоток статора и ротора проходят полный цикл изменений при повороте ротора на угол
![]() ,
,
поэтому можно записать
|
(2.6) |

С учетом выражения (2.5) уравнения электрического равновесия можно представить в обобщенной форме записи
|
(2.7) |
где ![]() определяются
формулами (2.6).
определяются
формулами (2.6).
В результате взаимодействия токов, протекающих по обмоткам обобщенной машины, на ее роторе создается электромагнитный моментМ, который может быть определен с помощью известных соотношений [2]:
|
(2.8) |
С помощью выражения (2.5) электромагнитный момент может быть выражен через токи обмоток:
|
(2.9) |
Уравнения электрического равновесия (2.7) в сочетании с уравнением электромагнитного момента (2.8) представляют собой математическое описание динамического процесса преобразования энергии, которое в дальнейшем будет конкретизировано для наиболее используемых разновидностей электродвигателей. В обобщенной форме это описание принимает следующий вид:
|
(2.10) |

Уравнение электромагнитного момента можно упростить, подставив в (2.9) выражения для собственных и взаимных индуктивностей обмоток (2.6):
|
(2.11) |
В электрическом двигателе осуществляется связь механического движения привода и приводимого им в движение механизма с электрическими процессами в системе автоматического управления и наоборот. Эта связь объединяет механическую и электрическую части в единую электромеханическую систему.
Так
как
зависят
от угла ![]() ,
а, следовательно, и от времени t,
уравнение (2.7) после дифференцирования
по времени преобразуется к виду:
,
а, следовательно, и от времени t,
уравнение (2.7) после дифференцирования
по времени преобразуется к виду:
|
(2.12) |
где
![]()
- угловая скорость вала двигателя.
Первый член
каждого уравнения (2.12) представляет
собой падение напряжения на активном
сопротивлении цепи данной обмотки,второй –
результирующую ЭДС самоиндукции и
взаимной индукции ![]() ,
вызванную изменениями токов в обмотках,
а третий член
отражает взаимодействие механической
и электрической частей электропривода
и представляет собой результирующую
ЭДС, наведенную в обмотке в результате
механического движения ротора машины.
,
вызванную изменениями токов в обмотках,
а третий член
отражает взаимодействие механической
и электрической частей электропривода
и представляет собой результирующую
ЭДС, наведенную в обмотке в результате
механического движения ротора машины.
Следовательно, математическое описание процессов преобразования энергии в обобщенной электрической машине в общем виде имеет следующий вид:
|
(2.13) |

Контрольные вопросы к лекции No 2.
Назовите основное условие возможности представления многофазной электрической машины с n–фазной обмоткой статора и m–фазной обмоткой ротора эквивалентной двухфазной машиной.
С какой скорость вращаются обмотки статора обобщенной электрической машины?
С какой скорость вращаются обмотки ротора обобщенной электрической машины?
Значения каких индуктивностей обмоток статора и ротора от угла поворота ротора
 ?
?Поясните физический смысл полученных уравнений электрического равновесия напряжений в обмотках обобщенной электрической машины:
.
ОТВЕТЫ
No задания |
Ответ |
1 |
Полные сопротивления фаз статора и ротора должны быть соответственно равны. |
2 |
Обмотки статора обобщенной электрической машины неподвижны в пространстве. |
3 |
Обмотки ротора обобщенной электрической машины неподвижны относительно ротора и вращаются в пространстве со скоростью ротора . |
4 |
Взаимные индуктивности |
5 |
Первый член каждого уравнения представляет собой падение напряжения на активном сопротивлении цепи данной обмотки, второй – результирующую ЭДС самоиндукции и взаимной индукции , вызванную изменениями токов в обмотках, а третий член отражает взаимодействие механической и электрической частей электропривода и представляет собой результирующую ЭДС, наведенную в обмотке в результате механического движения ротора машины. |
Лекция No 3.
Тема: «Координатные преобразования уравнений электромеханического преобразования энергии»
Достоинством полученного в предыдущей лекции математического описания процессов электромеханического преобразования энергии является, что в качестве независимых переменных в нем используются действительные токи, протекающие в обмотках, и действительные напряжения питания. Такое описание динамики системы дает прямое представление о физических процессах в системе, но является крайне сложным и неудобным для анализа.
Среди этих неудобств основными являются:
использование двух систем координат 2d, 2q,
зависимость собственных и взаимных индуктивностей от механической координаты .
Математическое описание процессов электромеханического преобразования энергии в обобщенной машине значительно упрощается путем линейных преобразований исходной системы уравнений за счет замены действительных переменных новыми переменными при условии сохранения адекватности математического описания физическому объекту.
Условие адекватности обычно формулируется в виде требования инвариантности мощности при преобразовании уравнений.
Вначале
рассмотрим действительные преобразования,
позволяющие перейти от физических
переменных, определяемых двумя системами
координат ![]() и d, q,
к расчетным переменным, соответствующим
одной системе координат, вращающейся
в пространстве с произвольной скоростью
и d, q,
к расчетным переменным, соответствующим
одной системе координат, вращающейся
в пространстве с произвольной скоростью ![]() .
.
Для получения формул прямого и обратного преобразования используем формальный прием, основанный на представлении мгновенных значений переменных электрической машины в виде пространственных векторов.

Рис. 3.1. Преобразование переменных статора обобщенной машины
На рис. 3.1. показано взаимное расположение осей жестко связанных со статором и произвольной системы ортогональных координат u,v, вращающихся относительно неподвижного статора со скоростью , а также представлены преобразования обмоточной переменной статора x1, которой в общем виде обозначены напряжение, ток или потокосцепление обмоток статора.
Считая заданными реальные переменные статора в осях соответствующие им новые переменные в системе координат u,v можно определить как суммы проекций реальных переменных на новые оси u,v. С учетом построений, приведенных на рис. 3.1, можно записать:
|
|
(3.1) |



Рис. 3.2. Преобразование переменных ротора обобщенной машины
На рис. 3.2. показано взаимное расположение осей жестко связанных со статором, осей d ,q, жестко связанных с ротором и произвольной системы ортогональных координат u,v, вращающихся относительно неподвижного статора со скоростью , а также представлены преобразования обмоточной переменной ротора x2, которой в общем виде обозначены напряжение, ток или потокосцепление обмоток ротора.
Считая заданными реальные переменные ротора в осях d ,q, соответствующие им новые переменные в системе координат u,v можно определить как суммы проекций реальных переменных на новые оси u,v. С учетом построений, приведенных на рис. 3.2, можно записать:
|
|
(3.2) |


Таким образом, формулы прямого преобразования переменных принимают следующий вид:
|
(3.3) |

Рассматривая рис. 3.1, 3.2, нетрудно понять, что новые переменные и реальные переменные есть проекции на соответствующие оси координат одних и тех же результирующих векторов, равных геометрической сумме этих переменных. Учитывая это, с помощью аналогичных построений можно получить и формулы обратного перехода от преобразованных переменных к реальным переменным:
|
(3.4) |

Используя полученные формулы, выполним преобразования математического описания процессов в обобщенной электрической машине.
В полученных в предыдущей лекции уравнениях электрического равновесия
|
(3.5) |
выразим с помощью (3.4) все реальные переменные в системе координат u,v:
|
(3.6) |
|
(3.7) |
|
(3.8) |
|
(3.9) |


В уравнениях (3.6) и (3.7) выполним все предусмотренные операции дифференцирования и получим:
|
(3.10) |
|
(3.11) |


Умножим уравнение (3.10) на
![]() ,
,
а уравнение (3.11) – на
![]() ,
,
а затем сложим их. После приведения подобных членов с учетом, что
![]() ,
,
получим:
![]()
Если умножить уравнение (3.10) на
,
а уравнение (3.11) – на
,
можно получить уравнение для оси v статора:
![]()
Преобразованные уравнения электрического равновесия для обмоток ротора находятся аналогично. Полная система уравнений электрического равновесия в обмотках обобщенной электрической машины имеет следующий вид:
|
(3.12) |

Уравнения потокосцеплений в реальных координатах 2d, 2q имеют вид:
|
(3.13) |

Аналогично с помощью формул (3.4) можно преобразовать и уравнения потокосцеплений (3.13). В результате получим:
|
(3.14) |

Соотношения (3.14) можно достаточно просто записать на основе физических соображений. В системе координат u,v, вращающейся со скоростью , обмотки машины неподвижны друг относительно друга. Поэтому потокосцепление каждой обмотки определяется собственной индуктивностью и взаимной индуктивностью с другой обмоткой, расположенной на той же оси. Взаимодействие с токами других обмоток отсутствует, так как их сдвинуты на 90 эл. градусов.
Проверим, выполняется требование инвариантности мощности и соответственно момента, так как скорость преобразованию не подлежит. Для упрощения записи примем
![]() .
.
Тогда вся мощность поступает в машину со стороны статора:
|
(3.15) |
Произведя в (3.15) замену переменных с помощью формул (3.4), получим:
|
(3.16) |
Таким образом, условие инвариантности мощности при рассмотренном преобразовании переменных выполняется.
Теперь воспользуемся формулами преобразования для получения удобных выражений электромагнитного момента. В уравнении электромагнитного момента, полученном в предыдущей лекции:
![]()
заменим реальные переменные преобразованными, используя формулы (3.4). В результате получим:
|
(3.17) |

В результате преобразований (3.17) с учетом (3.14) можно получить еще следующие формулы для определения электромагнитного момента обобщенной машины
|
(3.18) |
|
(3.19) |
|
(3.20) |
Рассматривая
полученные уравнения электромеханического
преобразования энергии, можно убедиться,
что переход к модели с взаимно неподвижными
обмотками существенно упрощает
математическое описание динамических
процессов. Коэффициенты взаимной
индукции и потокосцепления взаимно
неподвижных обмоток становятся
независимыми от механической координаты,
а движение реальных обмоток и вращение
координатных осей учитываются в
уравнениях электрического равновесия
введением дополнительных ЭДС вращения.
Значительно упрощается и уравнение
электромагнитного момента двигателя,
в котором устраняется зависимость от
угла ![]() и
электромеханическая связь проявляется
посредством зависимости токов и
потокосцеплений обмоток от скорости
электродвигателя.
и
электромеханическая связь проявляется
посредством зависимости токов и
потокосцеплений обмоток от скорости
электродвигателя.
Контрольные вопросы к лекции No 3.
Назовите основные причины неудобств использования полученного в предыдущей лекции математического описания процессов электромеханического преобразования энергии в обобщенной электрической машине.
Какой формальный прием используется для получения формул прямого и обратного преобразования переменных обобщенной электрической машины?
Укажите физический смысл выражений для определения потокосцеплений обмоток обобщенной электрической машины в новой системе координат u,v.
Назовите основные достоинства полученного математического описания электромеханического преобразования энергии в системе координат u,v.
ОТВЕТЫ
No задания |
Ответ |
1 |
Основными причинами неудобств являются: использование двух систем координат 2d, 2q, зависимость собственных и взаимных индуктивностей от механической координаты . |
2 |
Для получения формул прямого и обратного преобразования используется формальный прием, основанный на представлении мгновенных значений переменных электрической машины в виде пространственных векторов.. |
3 |
В системе координат u,v, вращающейся со скоростью , обмотки машины неподвижны друг относительно друга. Поэтому потокосцепление каждой обмотки определяется собственной индуктивностью и взаимной индуктивностью с другой обмоткой, расположенной на той же оси. Взаимодействие с токами других обмоток отсутствует, так как их сдвинуты на 90 эл. градусов |
4 |
Переход к модели с взаимно неподвижными обмотками существенно упрощает математическое описание динамических процессов. Коэффициенты взаимной индукции и потокосцепления взаимно неподвижных обмоток становятся независимыми от механической координаты, а движение реальных обмоток и вращение координатных осей учитываются в уравнениях электрического равновесия введением дополнительных ЭДС вращения. Значительно упрощается и уравнение электромагнитного момента двигателя, в котором устраняется зависимость от угла и электромеханическая связь проявляется посредством зависимости токов и потокосцеплений обмоток от скорости электродвигателя |
Лекция No 4.
Тема: «Фазные преобразования переменных. Выбор скорости вращения координатных осей u,v »
Математическое описание динамических процессов получено для двухфазной электрической машины. Реальные электродвигатели переменного тока чаще всего имеют трехфазную обмотку статора, поэтому возникает необходимость преобразования переменных трехфазной машины к переменным двухфазной модели и наоборот. Основой для такого преобразования может служить физический смысл координатных преобразований. Действительно, один и тот же результирующий вектор МДС может быть создан как двухфазной, так и трехфазной обмоткой, поэтому для получения формул двухфазно-трехфазных преобразований будем использовать тот же принцип, что и для получения формул координатных преобразований, рассмотренный в предыдущей лекции.
Решим задачу преобразования реальных переменных
![]()
статора трехфазной машины к ортогональной системе координат то есть к реальным переменным статора эквивалентной двухфазной машины.
Разница в числе фаз затрудняет выполнение условия инвариантности мощности. Учитывая это, представим реальные переменные трехфазной машины в виде векторов, и будем полагать, что преобразованные переменные в осях не равны, а пропорциональны сумме проекций реальных переменных
на
оси ![]()

Рис. 4.1. Схема преобразования переменных трех фазного электродвигателя
На основании построений, приведенных на рис. 4.1, можно записать
|
(4.1) |

где kc – согласующий коэффициент пропорциональности, выбор которого осуществляется из условия инвариантности мощности.
Рассмотрим наиболее распространенный на практике случай, когда переменные трехфазной машины подчиняются условию:
|
(4.2) |
С учетом (3.2) можно записать
|
(4.3) |

Переменные
![]()
для роторной цепи машины также определяются выражениями (4.3) и (4.4) при соответствующей замене индексов.
Формулы обратного образования можно получить аналогично
|
(4.4) |

Для определения согласующего коэффициента kc используем равенство суммарной мгновенной мощности, потребляемой обмотками статора реальной и обобщенной машинами.
Выразим с помощью (4.4) составляющие мгновенной мощности трехфазной машины
|
(4.5) |

Следовательно, для выполнения условия инвариантности мощности согласующий коэффициент должен иметь значение
|
(4.6) |
при этом
![]()
Подставляя (4.6) в (4.3),

получим формулы прямого преобразования
|
(4.7) |

Матричная форма указанных формул принимает следующий вид:
|
(4.8) |

Запишем так же и формулы обратного преобразования.
|
(4.9) |

или в матричной форме
|
(4.10) |

Рассмотренные преобразования переменных обобщенной электрической машины в значительной степени облегчают анализ динамических режимов электропривода и во многих случаях позволяют при моделировании на ЭВМ вместо реальных переменных токов и напряжений оперировать соответствующими им после преобразования постоянными величинами. Это удается достичь удачным выбором скорости вращения координатных осей u,v.
Выбор
![]()
обеспечивает преобразование реальных переменных ротора, выраженных в осях 2d, 2q, к неподвижным осям
![]()
связанным со статором машины. Уравнения электрического равновесия напряжений в обмотках статора и ротора в этом случае имеют вид:
|
(4.11) |
При этом преобразовании напряжения и токи обмоток остаются переменными, но имеют одинаковую частоту, равную частоте сети.
Вариант
![]()
соответствует преобразование реальных переменных машины к осям d, q, жестко связанным с ротором машины. Уравнения электрического равновесия напряжений в обмотках статора и ротора в этом случае имеют вид:
|
(4.12) |

Здесь также напряжения и токи обмоток являются переменными, но имеют как в статоре, так и в роторе частоту
![]() ,
,
т.е. частоту тока ротора.
Если принять
![]() ,
,
можно выразить все переменные системы в осях x,y, вращающихся с синхронной скоростью машины. Уравнения электрического равновесия напряжений в обмотках статора и ротора в этом случае имеют вид:
|
(4.13) |

При этом к реальным обмоткам статора приложена симметричная двухфазная система напряжений
|
(4.14) |
С помощью формул прямого преобразования, приведенных в предыдущей лекции (3.3), положив
,
преобразуем напряжения
![]()
в соответствующие им напряжения u1x, u1y:

Таким образом, в системе координат x,y реальные переменные напряжения, приложенные к обмоткам статора, преобразуются в постоянное напряжение U1max=const, приложенное к оси x. Этот результат имеет очевидный физический смысл: вращающееся магнитное поле, создаваемое при неподвижных обмотках статора, переменными напряжениями
,
при переходе к обмоткам, вращающимся со скоростью поля, может быть создано только постоянным напряжением.
Контрольные вопросы к лекции No 4.
Почему считается, что преобразованные переменные в осях не равны, а пропорциональны сумме проекций реальных переменных на оси ?
Какие условия используются для определения значения согласующего коэффициента пропорциональности?
При каком значении скорости вращения системы координат
 реальные
переменные напряжения, приложенные к
обмоткам статора, преобразуются в
постоянное напряжение U1max=const.
реальные
переменные напряжения, приложенные к
обмоткам статора, преобразуются в
постоянное напряжение U1max=const.
ОТВЕТЫ
No задания |
Ответ |
1 |
Разница в числе фаз преобразованных и реальных переменных затрудняет выполнение условия инвариантности мощности |
2 |
Для определения значения согласующего коэффициента kc используется равенство суммарной мгновенной мощности, потребляемой обмотками статора реальной и обобщенной машинами |
3 |
|
Лекция No 5.
Тема: «Обобщенная структурная модель асинхронного электродвигателя»
Асинхронный двигатель (АД) является наиболее массовым электродвигателем, благодаря конструктивной простоте широко применяемым в современных электромеханических системах.
Для построения структурных моделей АД в большинстве случаев используется математическое описание динамических процессов в обобщенной электрической машине. Такое описание для плоской ортогональной системы координат u,v, вращающихся с произвольной скоростью , получено в предыдущих лекциях и содержит в своем составе
дифференциальные уравнения электрического равновесия напряжений в обмотках статора и ротора машины:
|
(5.1) |

уравнения для потокосцеплений:
|
(5.2) |
уравнения для электромагнитного момента:
|
(5.3) |

уравнения движения механической части электропривода, которое в простейшем случае имеет следующий вид:
|
(5.4) |

Очевидно, что для построения структурной модели АД необходимо выбрать значение скорости вращения системы координат , из уравнений (5.1) с помощью выражений (5.2) исключить зависимые переменные и выбрать необходимое уравнение вычисления электромагнитного момента. Таким образом, в общем виде структурная модель асинхронного электродвигателя на функциональном уровне может быть представлена с помощью трех функциональных блоков, схема соединения которых приведена на рис. 5.1.

Рис. 5.1. Схема обобщенной структурной модели АД
Здесь
в функциональном блоке ЕМР на
основании вводимых со стороны источника
питания напряжений статора U1u, U1v и
ротораU2u, U2v,
а также электрической скорости
ротора ![]() осуществляется
вычисление мгновенных значений четырех
составляющих вектора
осуществляется
вычисление мгновенных значений четырех
составляющих вектора![]() .
Возможны следующие варианты компонент
вектора
:
.
Возможны следующие варианты компонент
вектора
:
|
(5.5) |

Функциональный блок М предназначен для вычисления мгновенных значений электромагнитного момента М. Внутреннее представление этого блока определяется выбранным вариантом компонент вектора .
Внутреннее представление функционального блока MHN не зависит от выбранной системы координат. В простейшем случае, схема этого представления, построенная на основании (5.4), приведена на рис. 5.2.

Рис. 5.2. Внутреннее представление функционального блока MHN
В большинстве практических случаев в асинхронном электродвигателе напряжение подводится только к обмоткам статора, а обмотки ротора замыкаются. Поэтому функциональный блок ЕМР имеет, как правило, три входа:
![]() .
.
Для имитации работы АД от трехфазной сети переменного напряжения необходимо построить модель этой сети и преобразовать трехфазную систему напряжений к двухфазной модели.
В этих целях используем два функциональных блока Сеть_3ф и X_ALB, схема соединения которых приведена на рис. 5.3.

Рис. 5.3. Структурная модель формирования эквивалентной двухфазной сети
Функциональный блок Сеть_3ф, внутреннее представление которого приведено на рис. 5.4, формирует трехфазную систему напряжений промышленной частоты
![]()
|
(5.6) |


Рис. 5.4. Внутренне представление блока Сеть_3ф.
Диаграммы напряжений
приведены на рис 5.5.

Рис. 5.5. Диаграммы напряжений .
Функциональный блок X_ALB, внутреннее представление которого приведено на рис. 5.6, осуществляет линейное преобразование напряжений
к напряжениям
![]()
в двухфазной неподвижной в пространстве системе координат .

Рис. 5.6. Внутренне представление функционального блока X_ALB, осуществляющего преобразование трехфазных переменных к двухфазным.
Диаграммы напряжений
приведены на рис 5.7

Рис. 5.7. Диаграммы напряжений
В процессе построения и использования моделей реальных ЭМС с асинхронными электродвигателями может потребоваться вычисление мгновенных значений токов и потокосцеплений, которые не входят в состав вектора , и, следовательно, не вычисляются в функциональном блоке ЕМР. Для решения этих задач в обобщенную структурную модель АД включаются дополнительные функциональные блоки. Дополнительные блоки потребуются для регистрации реальных трехфазных координат системы.
Так,
например, если в процессе постановки
имитационных экспериментов нам необходимо
наблюдать динамические процессы
изменения потокосцеплений статора в
системе координат
и
реальных токов ротора в системе
координат a, b, c,
обобщенную модель АД не обходимо
дополнить двумя функциональными
блоками ![]() и X_abc. (рис.
5.8).
и X_abc. (рис.
5.8).
Здесь функциональный блок осуществляет преобразование линейно зависимых токов и потокосцеплений статора и ротора. Необходимую внутреннюю структуру блока Вы легко сможете построить сами, используя зависимости (5.2). Функциональный блок X_abcосуществляет преобразования двухфазных переменных двигателя к трехфазным. Внутренне представление блока X_abc приведено на рис. 5.9.

Рис. 5.8. Модифицированная схема обобщенной структурной модели АД

Рис. 5.9. Внутреннее представление функционального блока X_abc
Контрольные вопросы к лекции No 5.
Какие функциональные блоки включены в состав обобщенной структурной модели асинхронного электродвигателя?
Каким образом изменится схема обобщенной структурной модели АД, если потребуется вычисление мгновенных значений токов и потокосцеплений, которые не входят в состав вектора ?
Как изменится схема обобщенной структурной модели АД, если потребуется вычисление реальных трехфазных токов ротора в системе координат a, b, c?
ОТВЕТЫ
No задания |
Ответ |
1 |
В состав обобщенной структурной модели АД должны быть включены функциональные блоки:
|
2 |
В обобщенную модель АД необходимо включить дополнительный функциональный блок , осуществляющий преобразование линейно зависимых токов и потокосцеплений статора и ротора. |
3 |
Если токи ротора не включены в состав компонент вектора , то В обобщенную модель АД необходимо включить дополнительный функциональный блок для вычисления токов ротора в двухфазной системе координат, а к его выходам подключить Функциональный блок X_abc осуществляющий преобразования двухфазных переменных двигателя к трехфазным. |
Лекция No 6.
Тема: Построение структурной модели электромеханического преобразования энергии в асинхронном электродвигателе для системы координат »
Наибольший практический интерес представляют структурные модели асинхронного электродвигателя, построенные в неподвижной ортогональной системе координат . Это объясняется, прежде всего, тем, что указанные модели могут быть использованы для имитационного моделирования систем, в которых АД подключается к источникам несинусоидального напряжения (автономным инверторам, статическим преобразователям частоты и т.п.).
Для неподвижной относительно статора системы координат
![]()
дифференциальные уравнения электрического равновесия напряжений в обмотках статора и ротора машины принимают следующий вид
|
(6.1) |

Четыре уравнения системы (6.1) содержат восемь линейно зависимых переменных. В этой связи, здесь, прежде всего необходимо, с помощью выражений связи токов и потоко сцеплений обмоток статора и ротора (см. (5.2) в предыдущей лекции)
|
(6.2) |

исключить две пары переменных, то есть выбрать состав компонент вектора .
Следует отметить, что выбрать состав компонент вектора нужно так, чтобы результирующее математическое описание электромеханического преобразования энергии в АД не содержало бы алгебраических уравнений, а, следовательно, структурная модель не имела бы безынерционных контуров. Выберем следующий состав компонент вектора :
![]() .
.
Из двух последних уравнений системы (6.2) выразим токи ротора
|
(6.3) |

Полученные выражения (6.3) подставим в уравнения для потокосцеплений статора, то есть в первые два уравнения системы (6.2)

Обозначив
 ,
,
получим выражения для потокосцеплений обмоток статора:
|
(6.4) |

Далее выражения (6.3) подставим в уравнения системы (6.1) и с учетом обозначения
![]() ,
,
получим
|
(6.5) |

Преобразуем (6.5) к виду, удобному для построения структурной модели
|
(6.6) |

С помощью полученных уравнений можно легко построить внутренне представление функционального блока ЕМР. Схема этого представления приведена на рис. 6.1, а расшифровка параметров динамических элементов представлено в таблице 6.1.

Рис. 6.1. Внутренняя схема функционального блока ЕМР
Таблица 6.1. Параметры элементов функционального блока ЕМР

Для выбранного состава компонент вектора внутренняя структура блока формирования электромагнитного момента принимает вид, приведенный на рис. 6.2.

Рис. 6.2. Внутренняя схема функционального блока М
С учетом вышеизложенного, структурная модель функционального уровня асинхронного электродвигателя, построенная в систем координат , принимает вид, приведенный на рис. 6.3.
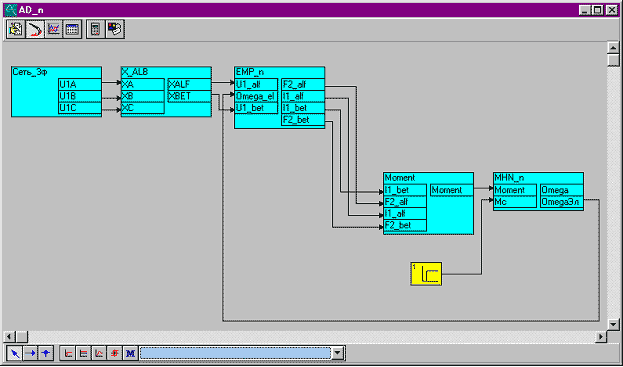
Рис. 6.3. Структурная модель АД в системе координат
Результаты имитационного эксперимента прямого пуска имитационного эксперимента с использованием построенной структурной модели приведены на рис. 6.4. Конкретные значения и методику расчета параметров электродвигателя, его модели и можно найти в методических указаниях к лабораторному практикуму [3]
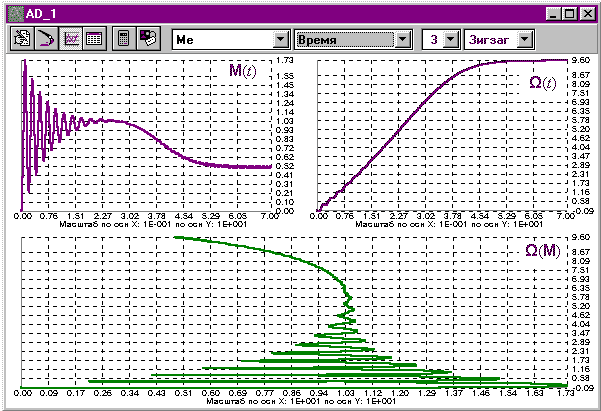
Рис. 6.4. Результаты испытания модели АД в системе координат
Контрольные вопросы к лекции No 6.
Из каких соображений следует выбирать состав компонент вектора при построении модели АД системе координат ?
Какие динамические элементы указывают на нелинейных характер модели АД в системе координат ? В каких функциональных блоках они присутствуют?
При каких значениях и характере (активный или реактивный) момента статического сопротивления выполнен имитационный эксперимент, результаты которого приведены на рис. 6.4?
ОТВЕТЫ
No задания |
Ответ |
1 |
Состав компонент вектора нужно выбирать так, чтобы результирующее математическое описание электромеханического преобразования энергии в АД не содержало бы алгебраических уравнений, а, следовательно, структурная модель не имела бы безынерционных контуров. Для модели АД в системе координат вектор целесообразно сформировать в следующем виде:
|
2 |
На нелинейных характер модели АД в системе координат указывают блоки перемножения в функциональных блокахЕМР и М. |
3 |
Имитационный эксперимент выполнен при постоянном значении активного момента статического сопротивления Мс=5 Нм. |
Лекция No 7.
Тема: Построение структурной модели электромеханического преобразования энергии в асинхронном электродвигателе для системы координат d,q »
Для
неподвижной относительно ротора системы
координат![]() ,
вращающейся в пространстве со скоростью
,
вращающейся в пространстве со скоростью
![]() ,
,
дифференциальные уравнения электрического равновесия напряжений в обмотках принимают следующий вид
|
(7.1) |

Четыре уравнения системы (7.1) содержат восемь линейно зависимых переменных. В этой связи, здесь, прежде всего необходимо, с помощью выражений связи токов и потоко сцеплений обмоток статора и ротора (см. (5.2) в лекции No 5)
|
(7.2) |

исключить две пары переменных, то есть выбрать состав компонент вектора .
Следует отметить, что выбрать состав компонент вектора нужно так, чтобы результирующее математическое описание электромеханического преобразования энергии в АД не содержало бы алгебраических уравнений, а, следовательно, структурная модель не имела бы безынерционных контуров. Выберем следующий состав компонент вектора :
![]() .
.
Из первых двух уравнений системы (7.2) выразим токи ротора
|
(7.3) |

Полученные выражения (7.3) подставим в уравнения для потокосцеплений ротора, то есть в два последних уравнения системы (7.2)

Обозначив
 ,
,
получим выражения для потокосцеплений обмоток ротора:
|
(7.4) |

Далее выражения (7.3) подставим в уравнения системы (7.1) и с учетом обозначения
,
получим
|
(7.5) |

Примем
![]()
и преобразуем (7.5) к виду, удобному для построения структурной модели
|
(7.6) |

С помощью полученных уравнений можно легко построить внутренне представление функционального блока ЕМР_DQ. Схема этого представления приведена на рис. 7.1, а расшифровка параметров динамических элементов представлено в таблице 7.1.

Рис. 7.1. Внутренняя схема функционального блока ЕМР_DQ
Таблица 7.1. Параметры элементов функционального блока ЕМР_DQ

Для выбранного состава компонент вектора внутренняя структура блока формирования электромагнитного момента принимает вид, приведенный на рис. 7.2.

Рис. 7.2. Внутренняя схема функционального блока Moment_dq
Для формирования составляющих напряжения статора в системе координат d,q воспользуемся формулами преобразования, которые в общем виде получены в лекции 3 (3.3)
|
(7.7) |

Выражения (7.7) положены в основу внутреннего представления дополнительного функционального блока DQ (рис.7.3).
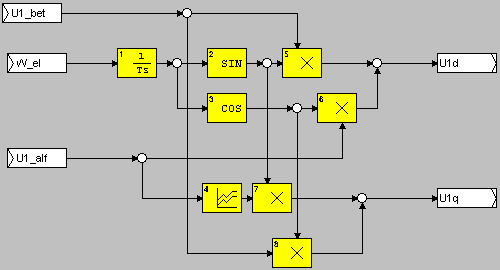
Рис. 7.3. Схема внутреннего представления функционального блока DQ
С учетом вышеизложенного, структурная модель функционального уровня асинхронного электродвигателя, построенная в систем координат d,q, принимает вид, приведенный на рис. 7.4.

Рис. 7.4. Структурная модель АД в системе координат d,q
Контрольные вопросы к лекции No 7
Из каких соображений следует выбирать состав компонент вектора при построении модели АД системе координат d,q?
Каким образом в функциональном блоке решается проблема вычисления мгновенных значений производных пототокосцеплений статора
![]() ?
?
Укажите основное отличие структурной модели функционального уровня АД в системе координат от такой же модели в системе координат d,q?
ОТВЕТЫ
No задания |
Ответ |
1 |
Состав компонент вектора нужно выбирать так, чтобы результирующее математическое описание электромеханического преобразования энергии в АД не содержало бы алгебраических уравнений, а, следовательно, структурная модель не имела бы безынерционных контуров. Для модели АД в системе координат d,q вектор целесообразно сформировать в следующем виде: . |
2 |
Мгновенные значения производных пототокосцеплений статора снимаются с входов интеграторов вычисления потокосцеплений
|
3 |
В структурную модель функционального уровня АД в системе координат d,q включен дополнительный функциональный блок DQ для формирования составляющих напряжения статора
|
Лекция No 8.
Тема: «Алгоритмические основы построения структурных моделей автономных инверторов напряжения (АИН)»
Регулирование координат асинхронных и синхронных электродвигателей в электромеханических системах осуществляется, как правило, с помощью индивидуального источника питания, обеспечивающего требуемые изменения, как величины, так и частоты переменного напряжения. Основным элементом такого источника является автономный инвертор. Процесс формирования алгоритмов имитации функционирования этого элемента рассмотрим на примере трехфазного автономного инвертора напряжения (АИН).

Рис. 8.1. Силовая схема автономного инвертора напряжения
Будем считать, что силовая схема АИН, приведенная на рис. 8.1, содержит шесть ключевых элементов V1 – V6, в качестве которых могут быть использованы как тиристорные, так и транзисторные ключи, открывающиеся и закрывающиеся по каналам управления. Поэтому инвертор можно считать системой переменной структуры с мгновенной коммутацией ключей.
Здесь в каждый момент времени разрешено быть замкнутыми трем ключам при запрещении одновременного замыкания пар ключей V1– V4, V3 – V6, V5 – V2, закорачивающих источник постоянного напряжения.
Мгновенные
значения фазных напряжений U1a, U1b, U1c нагрузки
(асинхронного электродвигателя) можно
рассматривать как проекции вектора
напряжения статора ![]() на
координатные оси x,
y, z пространственной
прямоугольной системы координат с
базисом
на
координатные оси x,
y, z пространственной
прямоугольной системы координат с
базисом
![]() .
.
При включении двигателя в «звезду» или «треугольник» выполняется условие:
|
(8.1) |
На
основании выше изложенного составим
таблицу состояний автономного инвертора
(табл. 1), в первых столбцах которой укажем
все возможные сочетания замкнутых
ключей, варианты подключения фаз нагрузки
к полюсам источника постоянного
напряжения Ud (1-
фаза подключена к «плюсу», 0 – к «минусу»).
В последние столбцы этой таблицы будут
записаны компоненты вектора напряжения
статора
в
системе координат
и
значения тока в цепи постоянного
напряжения ![]() .
.
Табл. 1. Таблица состояний инвертора

Анализ таблицы показывает, что инвертор в общем случае осуществляет периодическое подключение трехфазных обмоток статора асинхронного двигателя к источнику постоянного напряжения, причем мгновенные значения напряжений принимают значения
![]()
или
![]()
в зависимости от состояния ключей. При этом возможны шесть отличных от нуля и два нулевых состояния вектора .
|
(8.2) |
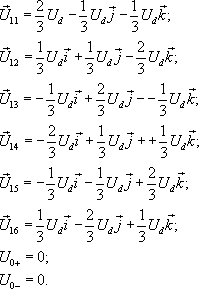
Анализ выражений (8.2) с учетом (8.1) показывает, что векторы
![]()
компланарны и лежат в плоскости, перпендикулярной биссектрисе пространственного угла, образованного положительными направлениями координатных осей x, y, z. В целях сокращения числа переменных перейдем к новой прямоугольной ортогональной системе координат с базисом
![]() .
.
Здесь
координатная ось ![]() направлена
вдоль вектора
направлена
вдоль вектора ![]() ,
ось
,
ось ![]() -
вдоль вектора
-
вдоль вектора
![]() ;
;
направление
оси ![]() определяется
векторным произведением
определяется
векторным произведением
![]() .
.
Тогда матрица перехода в систему координат
будет иметь следующий вид:
|
(8.3) |

Матрица обратного перехода в систему координат a,b,c
|
(8.4) |

Переход к новой неподвижной относительно статора системе координат
позволяет упростить представление вектора , т.е. перевести описание в плоскую систему координат, так как здесь отсутствуют проекции на ось .
С помощью матрицы (8.3) уравнения (8.2) в новом координатном базисе принимают следующий вид:
|
(8.5) |

Учитывая,
что проекции вектора
на
ось
тождественно
равны нулю, вектор напряжения статора
может быть представлен на плоскости ![]() шестью
отличными от нуля состояниями (рис.
8.2).
шестью
отличными от нуля состояниями (рис.
8.2).

Рис. 8.2. Составляющие вектора на плоскости
Представление выходного напряжения инвертора с помощью двух составляющих вектора в неподвижной в пространстве системе координат позволяет использовать полученную ранее модель асинхронного двигателя в неподвижной, жестко связанной со статором системе координат .
Таким образом, для построения модели трехфазного автономного инвертора с двигательной нагрузкой целесообразно рассматривать процессы в инверторе при представлении выходного напряжения вектором в системе координат .
Работа АИН определяется алгоритмом перехода от одного состояния ключей к другому. В зависимости от алгоритма вектор может принимать значения из (8.5) в определенной последовательности. Кроме того, возможны нулевые значения вектора
![]() .
.
Последовательность перехода от одного значения вектора к другому представляет собой алгоритм векторного формирования выходного напряжения инвертора.
Контрольные вопросы к лекции No 8.
Определите максимальное число возможных сочетаний ключей автономного инвертора, при которых на обмотки статора АД подается напряжение.
Какие значения принимают напряжения фаз обмотки статора АД при работе автономного инвертора?
Что называют алгоритмом векторного формирования выходного напряжения инвертора?
ОТВЕТЫ
No задания |
Ответ |
1 |
Шесть. |
2 |
Мгновенные значения напряжений статора АД принимают значения
или
в зависимости от состояния ключей АИН. |
3 |
Последовательность перехода от одного значения вектора к другому представляет собой алгоритм векторного формирования выходного напряжения инвертора. |
Лекция No 9.
Тема: «Структурные модели автономных инверторов напряжения (АИН)»
9.1. Логическая модель автономного инвертора
Имитация различных алгоритмов управления автономным инвертором возможна с помощью специального блока переключающих функций PFS, внешнее представление которого представлено на рис. 9.1. Функциональный блок PFS имеет 6 выходных сигналов S1, S2, S3, S4, S5, S6, которые идентифицируют состояния ключей V1, V2, V3, V4, V5, V6, принимая значения Si=1 при замкнутом состоянии i–го ключа и Si=0 - при разомкнутом состоянии i–го ключа. Частота переключения является внутренним параметром блока.

Рис. 9.1. Внешнее представление функционального блока PFS
Изменение алгоритма управления инвертором требует изменения внутренней структуры функционального блока PFS. Так, для наиболее применимого алгоритма управления ключами инвертора «по шестиугольнику», когда осуществляется циклический переход
, …,
диаграмма выходных сигналов блока S1, S2, S3, S4, S5, S6 приведена на рис. 9.2.

Рис. 9.2. Диаграмма выходных сигналов блока PFS
На основании информации, содержащейся в таблице состояний инвертора (см. предыдущую лекцию) составляющие вектора в системе координат могут быть определены с помощью следующих логических уравнений:
|
(9.1) |

Логические
уравнения (9.1) положены в основу внутреннего
представления функционального блока
вычисления напряжений ![]() -
ALBETA, схема которого приведена на рис.
9.3.
-
ALBETA, схема которого приведена на рис.
9.3.

Рис. 9.3. Схема внутреннего представления функционального блока ALBETA
9.2. Вычисление тока в цепи постоянного напряжения
Определенный класс исследовательских и проектных задач систем с автономными инверторами требуют изучения характера изменения тока в цепи постоянного напряжения. Как видно из силовой схемы инвертора (см. рис. 8.1 в предыдущей лекции), мгновенные значения тока определяются значениями токов
![]()
фаз нагрузки и состоянием ключей автономного инвертора. Результаты определения значений токов для каждого из восьми возможных состояний инвертора приведены в таблице состояний инвертора (см. предыдущую лекцию).
Сопоставляя выражения для токов с состояниями ключей АИН, характеризующимися булевыми переменными S1, S2, S3, S4, S5, S6можно получить обобщенное логическое уравнение вычисления тока:
|
(9.2) |
или
|
(9.3) |
где
![]()
– логические функции, представленные в уравнении (9.2).
Для определения логических функций построен функциональный блок FF, схема внутреннего представления которого приведена на рис. 9.4.

Рис. 9.4. Внутренняя схема функционального блока ALBETA
Вычисление тока производится с помощью функционального блока MID, схема внутреннего представления которого приведена на рис. 9.5.

Рис. 9.5. Схема внутреннего представления функционального блока MID
9.3. Матричная модель аин
Формально процесс получения составляющих выходного напряжения автономного инвертора в различных системах координат в зависимости от алгоритма управления и величины напряжения звена постоянного тока может быть описан с помощью матриц преобразования, как это показано на рис. 9.6., где приведена общая структура матричной модели инвертора.

Рис. 9.6. Матричная модель АИН
Входным сигналом модели является единичный вектор управления
|
(9.4) |
задающий пространственное расположение векторов выходного напряжения инвертора в системе координат A, B, C.
Переход от вектора управления к реальным фазным напряжениям осуществляется с помощью матрицы MABC
|
(9.5) |
Таким
образом, алгоритм переключения ключей
АИН здесь неявно задается коэффициентами
матрицы MABC.
Так для алгоритма управления «по
шестиугольнику», временные диаграммы
связи составляющих векторов ![]() и
и ![]() приведены
на рис. 9.7, матрицаMABCимеет
следующий вид:
приведены
на рис. 9.7, матрицаMABCимеет
следующий вид:
|
(9.6) |


a)
 15%
15%
b)
Рис. 9.7. Временные диаграммы составляющих векторов (а) и (б)
Для использования в качестве нагрузки АИН модели асинхронного электродвигателя, построенной в системе координат , необходимо перейти к новой неподвижной системе координат с базисом . Матрица перехода к ней имеет вид:
|
(9.7) |

Тогда напряжение статора в системе координат получается как
|
(9.8) |
С помощью матрицы перехода
|
(9.9) |

можно получить значения составляющих напряжения статора в системе координат d,q
|
(9.10) |
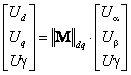
Здесь – угол поворота ротора в системе координат .
Контрольные вопросы к лекции No 9.
Какие типы логических элементов должны быть использованы в логической модели АИН? Определите число элементов каждого типа.
Сколько и какие значения принимает составляющая вектора по оси -
 .
.Укажите основные особенности формирования матричной модели АИН для подключения к модели АД в системе координат d, q.
ОТВЕТЫ
No задания |
Ответ |
1 |
Четыре элемента И, один элемент ИЛИ. |
2 |
|
3 |
Элементы матрицы перехода в систему координат d, q не являются постоянными коэффициентами, а зависят от угла поворота ротора . |
Лекция No 10.
Тема: «Электромеханическая система как объект функционального проектирования»
Функциональное представление электромеханических систем
Современная электромеханическая система (ЭМС) может быть представлена в виде совокупности взаимосвязанных элементов (рис. 10.1.): технологического агрегата (ТА), обеспечивающего материальную реализацию требуемого технологического процесса, автоматизированного электропривода (АЭП), осуществляющего необходимый характер движения ТА, и устройства управления (УУ), обеспечивающего оптимальное, в некотором смысле, выполнение программы технологического процесса.

P0 - программа выполнения технологического процесса,
U - сигналы управления АЭП, Y- координаты движения АЭП,
Р - показатели технологического процесса,
FA, FT - возмущающие воздействия.
Рис. 10.1 Функциональный состав электромеханических систем:
Развитие ЭМС на современном этапе идет как по пути совершенствования технических средств, так и в направлении поиска новых алгоритмов управления. Достигнутый уровень и перспективы развития технических средств автоматизированного электропривода и компьютерных систем управления таковы, что позволяют практически реализовать в реальном времени алгоритмы управления любой сложности и конфигурации. Проблема состоит лишь в определении оптимального алгоритма управления и в надежности технологического оборудования.
В этих случаях в проектировании и исследовании ЭМС выделяются следующие основные направления:
Автономное проектирование и исследование элементов ЭМС.
Совместное проектирование силовой части автоматизированного электропривода и технологического агрегата с последующим автономным проектированием управляющей части АЭП и управляющего устройства ЭМС.
Совместное проектирование силовой части АЭП и ТА с последующим совместным проектированием управляющих устройств АЭП и системы в целом.
Комплексное совместное проектирование и исследование всех элементов ЭМС.
Наибольшая эффективность проектных решений, очевидно, может быть достигнута при совместном проектировании всех элементов системы. Однако в большинстве случаев ряд субъективных и объективных причин вынуждает отказаться от комплексного решения задачи. Основными причинами здесь являются:
Разобщенность инженерных и научных коллективов, занимающихся исследовательскими и проектными работами в области автоматизированного электропривода и технологических агрегатов. Взаимная противоречивость целей проектирования и критериев качества элементов ЭМС.
Привлекательность использования многообразных проектных решений для ТА и АЭП, полученных автономно.
Значительное различие в затратах на изменение оптимизируемых параметров в отдельных элементах ЭМС. Например, в УУ для этого необходима корректировка компьютерной программы, а в ТА - изменение механической конструкции.
В то же время полный отказ от какого-либо совместного проектирования элементов ЭМС приводит к необходимости экспериментальной “доводки” полученных проектных решений, затраты на которую в большинстве случаев значительно превосходят проектные затраты.
Поэтому, наиболее привлекательным к настоящему времени становится направление 3, предусматривающее совместное проектирование силовой части АЭП и ТА с последующим совместным проектированием устройств АЭП и системы в целом.
Таким образом, проблема автоматизации проектирования и исследования электромеханических систем сопряжена с решением задач автоматизированного построения рациональной силовой схемы ЭМС и автоматизированного синтеза многоуровневой системы управления иерархической структуры.
Решение первой задачи, как правило, не отличается многообразием вариантов проектных решений, каждый из которых получается путем поиска в ограниченном множестве рациональных элементов силовой части и проектирования устройств их взаимодействия (например, устройств передачи механической энергии от электродвигателя к рабочей машине.)
Множество возможных вариантов алгоритмов управления на каждом уровне управления, множество способов и средств реализации этих алгоритмов, простота их перестройки и корректировки обусловливает значительные трудности в решении второй задачи. В то же время, именно здесь могут быть достигнуты значительные успехи в повышении качества проектируемых систем и именно здесь наиболее эффективнее область использования автоматизированного проектирования.
В проектировании систем управления, как и в проектировании большинства технических систем, можно выделить этапыфункционального, технического, конструкторского и технологического проектирования [11].
При проектировании управляющих устройств ЭМС, в том числе и систем управления АЭП, основные трудности возникают на этапах функционального и технологического проектирования.
На первом этапе проектирование затруднено из-за неопределенности целей, отсутствия единой технологии проектирования, необходимого набора математических моделей и универсальных алгоритмов выполнения проектных процедур, а на заключительном (технологическом) этапе либо невозможно, либо экономически неоправданно изготовление опытного образца.
В общем случае, функциональное проектирование включает в себя решение трудоемких задач, связанных с определением принципов построения объектов проектирования, анализа основных свойств этих объектов, исследованием процессов их функционирования.
Применительно к электромеханическим системам можно утверждать, что функциональное проектирование предусматривает создание на уровне различных вариантов математических моделей прототипа системы управления (СУ), обеспечивающего выполнения заданных целей управления, отвечающего требуемым критериям качества и исследование алгоритмов управления и основных свойств этого прототипа путем имитационных экспериментов с математическими моделями.
Абстрактное представление электромеханической системы
К настоящему времени наблюдается определенные противоречия между сложностью технических решений, используемых при построении электромеханических объектов и систем управления ими, и возможностями традиционных методов и технологий исследования таких систем.
Теоретическое и практическое решение задач проектирования неразрывно связано с количественным исследованием систем, инструментом для выполнения которого является абстрактная теория систем (АТС) [9]. Согласно указанной теории определение основополагающего термина “система” полностью зависит от того, какая принята математическая модель реальной системы. Так как реальный объект может иметь сколь угодно много математических моделей, которые определяются принятым уровнем абстрагирования, не может быть одной формулировки термина “система”.
Для достижения максимально возможной полноты информации в процессе решения исследовательских и проектных задач, необходимо изучить одну и ту же систему на всех целесообразных для данного случая уровнях абстракции.
Рассмотрим теоретико-множественный и динамический уровни абстрактного описания систем, применение которых, на наш взгляд, достаточно для теоретического обоснования процедур и операций функционального проектирования ЭМС.
На теоретико-множественном уровне абстрагирования элементы или, иначе, подсистемы изучаемых систем перечисляются с помощью некоторых множеств Xi и устанавливается характер отношений между ними.
По Бурбаки [1], множество образуется из элементов, обладающих некоторыми свойствами и находящихся в некоторых отношениях между собой и элементами других множеств. Сложные системы управления вполне подходят под такого рода определение понятия “множество”.
Система здесь представляет собственное подмножество
![]()
где
![]() ,
,
т.е. множество конечных наборов таких элементов (x1, x2,..., xn), что
![]()
Причем каждый элемент xi множества Xi, в свою очередь, может быть тоже множеством.
На этом уровне систему в общем виде можно описать через отношения множества входов и множества выходов
|
(10.1) |
где
![]()
- множество входов (входной объект);
![]()
- множество выходов (выходной объект).
Так как в большинстве случаев все элементы отношения (10.1) являются упорядоченными парами, то есть S является функцией
|
(10.2) |
система называется функциональной.
Для успешного решения проблем функционального проектирования ЭМС необходимо определить связь между множеством технологических показателей качества
|
(10.3) |
где qi - отдельные, частные показатели качества технологического процесса или выпускаемой продукции, и множеством сигналов управления автоматизированным электроприводом
|
(10.4) |
Если множество Q определить как входное, а множество U как выходное, электромеханическая система согласно выражению (10.1) будет определяться отношением
|
(10.5) |
Определению множества Siдолжны предшествовать определения соотношений между множествами, характеризующими непосредственно технологические процессы,
|
(10.6) |
где pi - i-й параметр технологического процесса, и автоматизированный электропривод, обеспечивающий выполнение этих процессов,
|
(10.7) |
где zi - i-ая выходная координата АЭП.
Конкретизация проектируемого объекта может привести к необходимости соотношений между рядом других новых множеств. Поэтому система S1 в общем случае может включать в себя некоторое конечное число видов взаимосвязанных множеств Q, P, Z, U,..... Ее целесообразно представлять в виде многоуровневой системы.
Учитывая изложенное, можно утверждать, что применение теоретико-множественного уровня абстрагирования ЭМС целесообразно для поиска рациональных иерархических последовательностей выполнения проектных процедур и операций. Иерархичность обеспечивается тем, что выходное множество системы верхнего уровня является входным множеством состояний нижеследующего уровня.
Очевидно, что для достижения конкретных целей функционального проектирования ЭМС необходимо также рассмотрение и других уровней абстрагирования, которые позволяли бы проводить более тонкий анализ различных свойств реальных систем.
На абстрактно-алгебраическом уровне описания систему определяют как некоторое отношение R, определенное на декартовом произведении множеств X. Следовательно, система также определяется заданием
где
|
(10.8) |
и семейством отношений (бинарных, терминарных и т. д.)
|
(10.9) |
С точки зрения АТС наш объект (ЭМС) несомненно, является динамической системой.
Чтобы дать строгое определение понятию “динамическая система”, ее определяют свойством иметь входы и выходы, т.е. определяют как некоторый структурный объект, в который в определенные моменты времени можно вводить вещество, энергию и информацию, а в другие моменты времени - выводить их. Процессы в динамических системах могут протекать непрерывно или совершаться только в дискретные моменты времени.
Предполагается, что в системе S вход
![]()
не может быть произвольным (например, бесконечно большим), а принадлежит ограниченному множеству значений
|
(10.10) |
Выходы системы, очевидно, также должны принадлежать фиксированному множеству, т.е.
|
(10.11) |
Кроме того, предполагается, что выходы системы по характеру своего изменения должны входить в ограниченный, вполне определенный класс функций ?, действующих на заданном интервале времени
![]()
Внутренние свойства системы характеризуются с помощью понятия “состояние системы”.
Настоящее состояние системы - это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно, начиная с настоящего времени.
Таким образом, знание состояния
![]()
в совокупности со знанием входного сигнала
![]() ,
,
действующего в момент времени t1 (настоящее время), определяют выходной сигнал y(t2) в последующий момент времени t2, т.е.
|
(10.12) |
где ![]() -
заданная функциональная связь между
переменными в скобках.
-
заданная функциональная связь между
переменными в скобках.
Заданием ![]() предопределяется
множество F возможных
значений выходных функций y(t). Кроме
того, в определении динамической системы
включается и способ определения состояния
системы в будущем x(t2)
на основании знания в настоящем
входа u(t1)
и состоянияx(t1),
т.е.
предопределяется
множество F возможных
значений выходных функций y(t). Кроме
того, в определении динамической системы
включается и способ определения состояния
системы в будущем x(t2)
на основании знания в настоящем
входа u(t1)
и состоянияx(t1),
т.е.
|
(10.13) |
где - также заданная функциональная связь между указанными переменными.
Следовательно, определение термина "динамическая система" сводится к заданию восьмерки:
|
(10.14) |
Подавляющее большинство проектных решений на этапе функционального проектирования принимаются после выполнения ряда проектных процедур и операции с моделями реальных элементов и подсистем ЭМС.
Строго говоря, восьмерка (10.14) не определяет реальную динамическую систему, а задает в общем виде ее математическую модель.
Выполнение необходимых проектных операций с моделями общего вида (10.14) необходимо введение соответствующих доопределений (конечномерность, линейность, стационарность, непрерывность и др.), после которых упрощаются функциональные связи (10.12), (10.13), сужаются области определения
![]()
и т.д., то есть упрощается математический аппарат компьютерной реализации моделей.
Таким образом, любая реальная динамическая система, даже в сравнительно “узком” контексте анализа статических и динамических процессов, в общем случае может быть идентифицирована бесконечным множеством математических моделей, т.е.
S={S1, S2,..., Sn} |
(10.15) |
где S1, S2,..., Sn - подмножества видов математических моделей динамических систем, отличающихся сложностью используемого математического аппарата и степенью адекватности реальным процессам.
Высокая степень адекватности модели реальному объекту, которая необходима для качественного решения исследовательских и проектных задач, сопровождается значительным увеличением сложности модели, нежелательным для проектных коллективов, так как сопряжено с необходимостью наличия специалистов высокой квалификации в области математического анализа, моделирования, применения вычислительной техники или с необходимостью применения специализированных программных комплексов.
Контрольные вопросы к лекции No 10.
Какие задачи решаются на этапе функционального проектирования электромеханических систем?
Определите понятие “состояние системы”.
Определите понятие “динамическая система”.
ОТВЕТЫ
No задания |
Ответ |
1 |
Функциональное проектирование электромеханических систем предусматривает создание на уровне различных вариантов математических моделей прототипа системы управления (СУ), обеспечивающего выполнения заданных целей управления, отвечающего требуемым критериям качества и исследование алгоритмов управления и основных свойств этого прототипа путем имитационных экспериментов с математическими моделями. |
2 |
Состояние системы - это та минимальная информация о прошлом, которая необходима для полного описания будущего поведения (т.е. выходов) системы, если поведение ее входов известно, начиная с настоящего времени. |
3 |
Знание состояния
в совокупности со знанием входного сигнала , действующего в момент времени t1 (настоящее время), определяют выходной сигнал y(t2) в последующий момент времениt2, т.е.
где - заданная функциональная связь между переменными в скобках. Заданием предопределяется множество F возможных значений выходных функций y(t). Кроме того, в определении динамической системы включается и способ определения состояния системы в будущем x(t2) на основании знания в настоящем входа u(t1) и состояния x(t1), т.е.
где - также заданная функциональная связь между указанными переменными. Следовательно, определение термина "динамическая система" сводится к заданию восьмерки:
|
Лекция No 11.
Тема: «Многоуровневая декомпозиция электромеханических систем и этапа их функционального проектирования»
Первоначальное представление современных электромеханических объектов, приведенное в предыдущей лекции, позволяет их отнести с точки зрения общей теории систем к классу сложных многомерных систем.
Декомпозиция, являющаяся удобным приемом исследования таких систем, предусматривает предварительную разгруппировку всего многообразия факторов, характеризующих функционирования системы [9]. Такая группировка факторов в теории систем названа рассмотрением системы на различных уровнях, основными из которых являются: страт, слой и эшелон. Два последних имеют более общее название - уровни иерархии. Согласно [10], страт - это отдельный аспект рассмотрения какого-либо сложного явления или описания объекта на определенном уровне иерархии целей и задач проектирования. Использование принципа “стратификации” позволяет представить систему большой размерности со сложной сетью прямых и обратных связей, системой более простых подсистем в соответствии с поставленными перед ней целями. Причем, любую систему можно разделить на подсистемы не единственным способом. Это зависит от того, какие аспекты описания системы мы хотим выделить, для обеспечения ее уверенного функционирования в данном направлении, организуя для него специальную подсистему.
Декомпозиция ЭМС с учетом иерархии задач функционального проектирования
Анализ приведенной в предыдущей лекции обобщенной схемы ЭМС позволяет выделить следующие проектные процедуры, упорядоченные в иерархическую последовательность (рис. 11.1) трех уровней

Рис. 11.1. Иерархическая структура функционального проектирования ЭМС
Верхний (первый) уровень предусматривает определение оптимальных (рациональных) показателей технологического процесса. Здесь решается задача оптимизации технологических процессов с целью получения их максимальной эффективности (например, максимальной производительности при минимальных расходах сырья и энергопотребления) при заданном составе технологического оборудования. Навтором уровне решаются задачи проектирования технологического оборудования, представляющего собой взаимосвязанную систему управления АЭП и ТА. На третьем (нижнем) уровне решается задача управляемости ТА с помощью АЭП. Используем абстрактное теоретико-множественное описание ЭМС. Тогда в соответствии с указанными уровнями иерархии задач функционального проектирования и согласно принципу стратификации ЭМС представляется трехуровневой иерархической системой. Иерархичность обеспечивается тем, что выходное множество системы верхнего уровня является входным множеством нижеследующего уровня.
На первом (верхнем) уровне определяется взаимная связь между множеством технологических показателей качества Q и множеством параметров технологических процессов Р в виде отношения
|
(11.1) |
Задачей управления этого уровня является определение оптимальных параметров множества Р, т. е. может быть классифицирована как задача технологической оптимизации.
На втором уровне иерархии система представляется отношением выходного множества Р и множеством выходных координат АЭП и ТА - Y
|
(11.2) |
Здесь осуществляется с помощью АЭП автоматическое управление технологическими процессами с целью обеспечения заданного множества Р в условиях внешних возмущений. Задачу управления этого уровня иерархии будем называть задачей взаимосвязанного управления.
На нижнем (третьем) уровне управляемость технологическим процессом описывается отношением выходного множества второго уровня Y и множества управляющих воздействий U
|
(11.3) |
Здесь обеспечивается необходимый характер изменения множества выходных координат АЭП и устранения влияния на него внешних возмущений.
Эта задача может быть определена как задача локального автоматического управления.
Двухсторонняя связь между стратами иерархической системы на рис. 11.1. указывает на взаимосвязь процессов на смежных уровнях.
Представленная трехуровневая иерархия задач управления однозначно определяет трехуровневую иерархическую систему управления, которая приведена на рис. 11.2.
Здесь объект управления представлен отношением
|
(11.4) |
где U3 - множество управлений системы нижнего уровня; F - множество возмущений, P - множество выходных сигналов.
Системы управления на каждом уровне представляются единым соотношением
|
(11.5) |
где i - номер уровня иерархии i=1, 2, 3,..., Ri - множество информационных сигналов (обратных связей) систем нижнего уровня.
При i=0, что соответствует системе управления верхнего уровня, выражение (11.5) имеет вид
|
(11.6) |
где Q1 - множество цепей управления, задаваемых системами более высокого уровня.

Рис. 11.2. Структура трехуровневой иерархической системы управления
Каждый уровень представленной иерархической системы обеспечивает достижения собственной заданной цели управления и оперирует своим вариантом модели объекта управления. В общем случае модель объекта управления является комбинацией отношений всех уровней его стратифицированного описания. Совокупный объект управления разделяется на связанные между собой объекты, выполняющие самостоятельные функции в общем технологическом процессе и являющиеся технически локальными.
Объект, описываемый отношением (11.4), согласно указанной концепции, разделяется на два иерархически связанных подобъекта О10 иО20. Первый из них О10, как правило, включает в себя автоматизированный электропривод и технологическое оборудование, второй О20 - технологический агрегат, зоны обработки материала и технологических процессов, составляющих производство продукции. Тогда модель первого подобъекта как система отношений входных и выходных координат определяется в виде
|
(11.7) |
где FA - подмножество возмущений, действующих на АЭП (подобъект О10).
Второй подобъект представляется
|
(11.8) |
где FT - подмножество возмущений, действующих на ТА (подобъект О20).
Декомпозиция объекта управления требует изменения иерархической структуры системы управления. Для иерархической соподчиненности передача управления должна производиться сверху вниз последовательно от одного уровня управления к другому. Но информационные потоки от объекта управления целесообразно направлять на те уровни системы, которые управляют соответствующими частями декомпозированного объекта.
Измененная структура многоуровневой системы управления принимает вид, показанный на рис. 11.3.

Рис. 11.3. Структура иерархической системы управления с декомпозированным объектом
Такая структура системы уравнения обладает следующими достоинствами:
Вертикальная декомпозиция объекта на непосредственно и косвенно управляемые подобъекты упрощают задачи синтеза управления, т.к. системы управления разных уровней имеют дело с более простыми объектами.
Возмущения, действующие на объект первого уровня О10, не влияют на работу объекта второго уровня благодаря системе первого уровня.
Для упрощения проектных операций синтеза управления целесообразна горизонтальная декомпозиция объектов и систем управления также по функционально-техническому принципу.
Составной объект управления
![]()
на каждом уровне представляется системой связанных более простых объектов.
|
(11.9) |


Практически к подобъектам O1j можно отнести отдельные электродвигатели, передаточные механизмы и т.д., а к подобъектам O2j - отдельные процессы, технологические агрегаты и т.д.
Модели подобъектов в общем виде представляются с помощью следующих выражений
|
(11.10) |
|
(11.11) |
где
![]()
 ,
,
![]() ,
,
I1k - множество индексов, обозначающих принадлежность Yj к подобъектам O1j, связанным с подобъектом О2к.
Декомпозированная система управления в этом случае строится по принципу - каждому подобъекту соответствует локальная система управления.
Система управления S0 разбивается на подсистемы, распределенные по уровням иерархии Si0; подсистемы Si0 в свою очередь разбиваются на подсистемы управления каждым подобъектом Sij. Объединение подсистем определяется выражениями
|
(11.12) |

где
![]()
- множество уровней иерархии;
![]()
- множество подсистем i-го уровня.
Объединяя оба выражения, получим
|
(11.13) |

Результаты декомпозиции объекта и системы управления представлены на рис. 11.4. в виде трехуровневой иерархической системы.
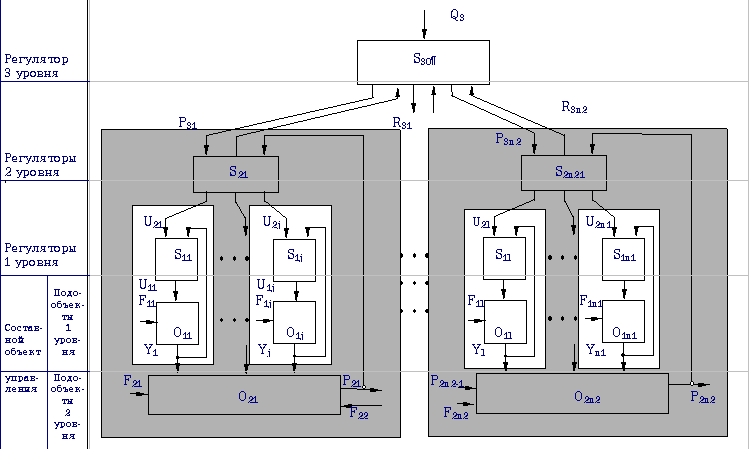
Рис. 11.4. Декомпозиция объекта и системы управления
Декомпозиция задачи функционального проектирования электромеханических систем
Центральной задачей этапа функционального проектирования ЭМС является задача синтеза системы управления, которая для декомпозированной системы может быть решена поэтапно путем решения задач локального управления, взаимосвязанного управления и технологической оптимизации.
На начальном этапе целесообразно рассмотреть задачу проектирования системы управления одного уровня, общность которой не изменяется при переходе к более высоким уровням иерархии.

Рис. 11.5. Три уровня проектирования в многоуровневой СУ
Задача проектирования системы и сама система управления реальным объектом может быть представлена в виде трех подзадач и соответствующих им подсистем (рис. 11.5):
управления реальным объектом;
идентификации модели объекта;
идентификации переменных состояний объекта.
Очевидно, что в ряде частных случаев вторая или третья подзадачи могут отсутствовать.
Каждая подсистема в таком представлении образует замкнутую по местному показателю или функционалу качества систему с обратной связью и состоит из трех основных элементов:
формирователя критерия качества (оптимальности) подсистемы;
объекта оптимизации (реального или его математической модели);
оптимизатора объекта.
Между собой подсистемы объединены прямыми и обратными связями, а крайние подсистемы такими же связями объединены с возможными системами более низкого и высокого уровней.
Рассмотрим обозначения элементов и связей подсистем.
Подсистема управления реальным объектом включает:
I - формирователь критерия качества управления;
![]() - реальный
объект;
- реальный
объект;
Opt I - оптимизатор критерия качества I по управляющему воздействию U;
Y - выход объекта (вектор выходных сигналов), являющийся входом подсистемы первичных преобразователей (измерительной, датчиковой подсистемы);
U - вход объекта и модели (вектор управляющих сигналов);
![]() - обратная
связь из системы более высокого уровня.
- обратная
связь из системы более высокого уровня.
Подсистема идентификации модели объекта содержит:
J - формирователь критерия качества идентификации;
![]() -
модель объекта управления со структурой
-
модель объекта управления со структурой ![]() и
вектором параметров
и
вектором параметров ![]() ;
;
Opt J - оптимизатор структуры и вектора параметров модели объекта;
![]() -
оценка вектора состояний объекта,
полученная по сигналам подсистемы
первичных преобразователей;
-
оценка вектора состояний объекта,
полученная по сигналам подсистемы
первичных преобразователей;
![]() -
вектор состояний, полученный на основании
сигналов
-
вектор состояний, полученный на основании
сигналов ![]() и
модели объекта
;
и
модели объекта
;
I - обратная связь из подсистемы управления реальным объектом.
Система идентификации сигналов содержит:
Jф - формирователь критерия качества идентификации (фильтрации) вектора состояний объекта;
![]() -
фильтр или наблюдатель состояния;
-
фильтр или наблюдатель состояния;
Opt JФ - оптимизатор структуры и вектора параметров Ф фильтра;
![]() -
информация о структуре и параметрах
датчиков физических переменных
объекта
(статические
и тарировочные характеристики и т.п.);
-
информация о структуре и параметрах
датчиков физических переменных
объекта
(статические
и тарировочные характеристики и т.п.);
![]() -
информация о погрешностях датчиков;
-
информация о погрешностях датчиков;
JФ - обратная связь из подсистемы идентификации модели объекта.
Анализ результатов декомпозиции ЭМС и задач их функционального проектирования позволяет утверждать, что для создания и компьютерной реализации универсальных алгоритмов ее решения, прежде всего, необходимо всесторонне рассмотреть проблему автоматизации синтеза подсистемы с обратной связью по функционалу качества (рис. 11.6.)

Рис. 11.6. Обобщенная схема локальной подсистемы с обратной связью
В общем случае, каждый элемент (оптимизатор, модель, формирователь критерия) может иметь три составляющие:
собственно элемент, участвующий в решении своей задачи;
множество таких элементов, каким-то образом упорядоченных;
проектор, выбирающий из множества элементов оптимальный по критерию качества системы более высокого уровня.
То
есть локальная подсистема (рис. 11.6.)
состоит из тройки множеств {Iq}
- критериев оптимизации, ![]() -
моделей объекта управления, {Opt
Iq}
- методов оптимизации.
-
моделей объекта управления, {Opt
Iq}
- методов оптимизации.
Для конкретного критерия Iq теоретически существует единственный оптимальный набор элементов и их параметров.
Практически
такой набор может быть определен только
в том случае, когда можно не считаться
с запретами на его поиск и при малом
числе элементов множеств ![]() , {Opt
I}.
, {Opt
I}.
Контрольные вопросы к лекции No 11.
Какие задачи решаются на верхнем уровне иерархии функционального проектирования электромеханических систем?
Какие задачи решаются на втором уровне иерархии функционального проектирования электромеханических систем?
Какие задачи решаются на третьем (нижнем) уровне иерархии функционального проектирования электромеханических систем?
Какие подзадачи и подсистемы могут быть выделены в задаче проектирования системы?
Какие основные элементы входят в состав каждой подсистемы?
Укажите основные составляющие каждого элемента подсистемы с обратной связью по функционалу качества и укажите.
ОТВЕТЫ
No задания |
Ответ |
1 |
Верхний (первый) уровень предусматривает определение оптимальных (рациональных) показателей технологического процесса. Здесь решается задача оптимизации технологических процессов с целью получения их максимальной эффективности (например, максимальной производительности при минимальных расходах сырья и энергопотребления) при заданном составе технологического оборудования. Задачей управления этого уровня может быть классифицирована как задача технологической оптимизации |
2 |
На втором уровне решаются задачи проектирования технологического оборудования. Здесь осуществляется с помощью АЭП автоматическое управление технологическими процессами. Задачу управления этого уровня иерархии будем называть задачей взаимосвязанного управления. |
3 |
На третьем (нижнем) уровне решается задача управляемости ТА с помощью АЭП. Эта задача может быть определена как задача локального автоматического управления. |
4 |
Задача проектирования системы и сама система управления реальным объектом может быть представлена в виде трех подзадач и соответствующих им подсистем: управления реальным объектом; идентификации модели объекта; идентификации переменных состояний объекта. |
5 |
Каждая подсистема образует замкнутую по местному показателю или функционалу качества систему с обратной связью и состоит из трех основных элементов: формирователя критерия качества (оптимальности) подсистемы; объекта оптимизации (реального или его математической модели); оптимизатора объекта. |
6 |
Каждый элемент (оптимизатор, модель, формирователь критерия) может иметь три составляющие: собственно элемент, участвующий в решении своей задачи; множество таких элементов, каким-то образом упорядоченных; проектор, выбирающий из множества элементов оптимальный по критерию качества системы более высокого уровня. |
Лекция No 12.
Тема: «Ранжирование математических моделей электромеханических систем»
Тип математической модели управляемого объекта оказывает существенное влияние на формирование структуры и параметров каждого множества тройки {Iq}, , {Opt Iq}, определяющей систему управления.
Причем элементы второго множества непосредственно представляют собой математические модели ; в элементах первого множества {Iq} математические модели для формирования функционала качества; выбор элементов третьего множества осуществляется в непосредственной зависимости от используемых математических моделей.
В подавляющем большинстве случаев для получения необходимой информации о свойствах реального объекта наблюдения необходима постановка серии экспериментов с его моделью (“прогона” модели). Поэтому, наибольший интерес представляют имитационные модели.
Следуя предложениям Р. Шеннона [12], имитационные модели удобно представлять в виде непрерывного спектра, простирающегося в общем случае от точных моделей или макетов реальных объектов до совершенно абстрактных символических моделей (рис. 12.1).

Рис. 12.1. Общий спектр имитационных моделей.
Очевидно, что использование полного спектра имитационных моделей практически невозможно, т.к. сопряжено с неоправданными затратами. На этапе автоматизации функционального проектирования ЭМС целесообразно использовать модели, которые могут быть реализованы на ЭВМ. В общем спектре (рис. 12.1) они расположены в правой части спектра.
В задачах функционального проектирования, реальный объект представляется динамической системой с точки зрения ее внешнего поведения, которую можно рассматривать как абстрактный набор упорядоченных данных о входных воздействиях U(t) и наблюдаемых выходных координатах Y(t).
В реальной ситуации конечной паре множеств {U, Y} можно поставить в соответствие бесконечное множество моделей.
Необходимость создания элементов технологии рационального применения имитационных моделей ЭМС в задачах их функционального проектирования потребовала формирования спектра этих моделей, в котором последние должны располагаться:
по мере снижения точности или адекватности динамических процессов (шкала точности);
по мере снижения сложности описания структуры и параметров, используемого математического аппарата и численных методов (шкала сложности);
по мере увеличения абстрактности внешнего представления (шкала формализации);
по мере снижения сложности компьютерной реализации (шкала реализации);
по мере снижения времени “прогона” модели (шкала быстродействия).
Кроме того, несомненный интерес представляют факторы, характеризующие простоту машинной реализации модели, наглядность, простоту, доступность, связь с физической реальностью модели для пользователя.
Для динамических систем взаимная связь между множеством входных воздействий U(t) и выходных координат Y(t) описывается с помощью нелинейных непрерывно-дискретных дифференциальных, алгебраических, логических уравнений постоянной и переменной структуры. К настоящему времени чаще всего используют два вида описаний:
- описание в терминах “вход-выход”;
- описание в терминах “пространства состояний”.
Базовым инструментом описания первого вида является структурная модель, понятие которой определено в первой части курса.
Структурная модель - некоторая схема из взаимосвязанных элементов, выделяемых по физическому назначению или выполняемой математической функции.
На математическом уровне, который является базовым для пользователя, структурная модель представляет собой совокупность блоков уравнений, которые выполняются по функциональному или физическому принципу, что позволяет легко формировать модели, близкие по структуре реальной технической системе. Графическое представление структурных моделей на этом уровне в определенном смысле соответствует традиционной структурной схеме с значительно расширенном составом динамических элементов.
Динамические элементы призваны осуществлять такие функции, как:
безынерционные преобразования сигналов (суммирование, усиление, уменьшение, деление);
интегрирование сигналов;
разнообразные нелинейные операции;
сложные логические операции;
вычисления таблично заданных функций;
операции дискретизации непрерывных сигналов, генерации дискретных событий;
преобразования дискретных сигналов;
прием и обработка сигналов с реального объекта.
Кроме того, для обеспечения корректной имитации алгоритмов управления и систем переменной структуры используютсяалгоритмические элементы. Алгоритмический элемент выполняет определенную последовательность действий (алгоритм). Однако, результаты вычислений присваиваются переменным, элементам массивов, выходам динамических элементов, которые не имеют строгой привязки к конкретным элементам, То есть, любой алгоритмический элемент может изменять значение любой переменной. Кроме того, алгоритмические элементы осуществляют оперативную корректировку плана вычислительного процесса при изменении структуры модели с помощью средств активизации динамических элементов.
Таким образом, с помощью расширенного состава динамических и алгоритмических элементов могут быть построены структурные модели широкого класса ЭМС. При этом достигается максимальная точность воспроизведения динамических процессов.
Для определения упорядоченных по введенным выше шкалам последовательностей структурных моделей, последние могут быть условно разделены на следующие виды:
линейные непрерывные модели, т.е. модели, построенные на базе линейных непрерывных дифференциальных уравнений, коэффициентов передачи и передающих функций элементов (для кратности представления будем называть такие модели L - модели);
- нелинейные непрерывные модели - модели, построенные на базе нелинейных непрерывных дифференциальных уравнений (N - модели);
нелинейные непрерывно-дискретные модели - модели, обеспечивающие при сохранении всех свойств N - моделей имитацию динамического поведения системы при непрерывных и дискретных сигналах управления (ND - модели);
нелинейные, непрерывно-дискретные нестационарные модели - модели, обеспечивающие при сохранении всех свойств ND - моделей корректную имитацию систем переменной структуры и управляющих алгоритмов (NVS - модели);
физико-математические модели - модели, обеспечивающие при сохранении свойств моделей предыдущих видов включения в свою структуру реальных элементов ЭМС и имитацию процессов в режиме реального времени (FM - модели).
В последние годы в теории автоматического управления (ТАУ), являющейся фундаментальной теоретической основой функционального проектирования ЭМС, в ряде других областей применения теории систем отмечается очень сильное развитие методов пространства состояний.
Базовым инструментом описания динамических систем в терминах “пространства состояний” является векторно-матричная модель (ВММ).
Основываясь на понятии состояния системы, приведенном в лекции 10, можно утверждать, что динамическая система может быть описана парой матричных уравнений
|
(12.1) |
|
(12.2) |
где
![]()
- множества состояний и входных воздействий, Т - упорядоченное множество моментов времени.
- n-мерная
вектор-функция системы, ![]() - m-мерная
вектор-функция выхода. Причем n -
соответствует размерности пространства
состояний и, следовательно, размерности
вектора состояний x(t), m -
соответствует числу входов системы и,
следовательно, размерности вектора
выхода y(t). Число
выходов системы r соответствует
размерности вектора входа u(t).
- m-мерная
вектор-функция выхода. Причем n -
соответствует размерности пространства
состояний и, следовательно, размерности
вектора состояний x(t), m -
соответствует числу входов системы и,
следовательно, размерности вектора
выхода y(t). Число
выходов системы r соответствует
размерности вектора входа u(t).
Матричное уравнение (12.1) называют уравнением состояния системы, а матричное уравнение (12.2) - уравнением выхода.
Если множество Х принадлежит конечномерному пространству, то (12.1) представляет собой конечномерную систему нелинейных нестационарных дифференциальных уравнений. Из системы (12.1) при определенных предположениях могут быть получены системы линейных и (или) стационарных уравнений, дискретная система (также линейная и (или) стационарная).
Чем уже область определения
,
тем ближе в пространстве Х будет упрощенная модель к исходной (12.1).
В частном случае вектор-функции
могут быть линейными комбинациями переменных состояния хi, и выходных переменных Uq. При этом динамическая система описывается в векторно-матричной форме
|
(12.3) |
|
(12.4) |
В то же время для гладкой системы (12.3) - (12.4) следует существование таких
![]()
что
с точностью до ![]() системе
(12.1) - (12.2) будет эквивалентна система
дифференциальных уравнений с постоянными
матрицами коэффициентов:
системе
(12.1) - (12.2) будет эквивалентна система
дифференциальных уравнений с постоянными
матрицами коэффициентов:
|
(12.5) |
|
(12.6) |
где А, B, C, D - матрицы размера (n x n), (n x r), (m x n),(m x r) соответственно.
Таким образом, модель (12.5)- (12.6) описывает динамическое поведение системы в классе линейных непрерывных стационарных систем и с точки зрения математического описания процессов полностью соответствует структурной линейной непрерывной модели (L - модели).
Назовем модель (12.5)- (12.6) линейной векторно-матричной моделью в непрерывном времени (VML -моделью). Отметим, что ВММ имеет единую форму представления независимо от размерности, что значительно облегчает алгоритмизацию и компьютерную реализацию в исследовательских и проектных операциях, а также предоставляет возможность исследования новых свойств объектов управления, которые скрыты при использовании структурных моделей (управляемость, наблюдаемость).
Из недостатков ВММ, прежде всего, следует отметить:
- потерю связи с физической реальностью;
- сложность формирования моделей, особенно для систем высокого порядка.
Широкое применение в теории и в практике автоматического управления цифровых управляющих устройств и систем управления с ЭВМ, обусловливает необходимость построения ВММ непрерывных объектов в дискретном времени.
Цифровые системы управления содержат как непрерывные, так и квантованные или дискретные сигналы. Наличие сигналов различного типа затрудняет описание динамического поведения системы. Однако часто можно ограничиться описанием поведения системы в моменты квантования. Такие системы называют системами дискретного времени, они оперируют с последовательностями чисел и, следовательно, для их описания естественно использовать разностные уравнения.
Проблема заключается в нахождении способа описания непрерывной динамической системы, связанной с ЭВМ посредством аналого-цифрового (АЦП) и цифро-аналогового преобразователей (ЦАП). Наиболее распространена ситуация, когда АЦП сохраняет уровень аналогового сигнала до тех пор, пока не потребуется новое преобразование.
Характеристики системы между моментами квантования дают в этом случае представление о реакции системы на ступенчатое воздействие с начальными условиями, т.е. между моментами квантования система функционирует как разомкнутая. Для периодического квантования с периодом Т модель сводится к системе разностных уравнений, которая при Т=1 (принимается только для простоты записи) имеет вид:
|
(12.7) |
|
(12.8) |
где
|
(12.9) |

Назовем ВММ непрерывного объекта (12.5) - (12.6) в дискретном времени, представленную в форме уравнений (12.7) - (12.8) линейной векторно-матричной моделью в дискретном времени (VLD- моделью).
Таким образом, для получения VLD- модели требуется вычислить матричную экспоненту и проинтегрировать ее.
Применение в задачах функционального проектирования ВММ вида (12.5) - (12.6) для нелинейных объектов может привести к существенным ошибкам. Однако, отмеченные преимущества таких моделей обусловливают насущную необходимость их совершенствования в направлении учета нелинейных функций отдельных элементов.
Для построения VML- модели вида (12.5) - (12.6) по известной модели динамической системы общего вида (12.1) - (12.2) необходимо вычисление матриц Якоби
|
(12.10) |
в точке (х?, u?, t)
Для достижения максимального соответствия динамических процессов, полученных при использовании моделей (12.1) - (12.2) и (12.5) - (12.6) можно найти как в направлении поиска оптимальной точки линеаризации (х?, u?, t), так и в направлении применения пошаговой линеаризации (12.10)в соответствии с изменением векторов состояния и управления х(t) и u(t). Последнее соответствует использованию конечного множества точек линеаризации {L1, L2,...Lq}, где Lj=(xj, uj, t).
В этом случае получается q - VML- моделей, которые могут быть идентифицированы одной нелинейной векторно-матричной моделью в непрерывном времени (VNN-моделью) путем применения трехмерных матриц AN, BN, размером (n x n x q) и (n x m x q) соответственно.
|
(12.11) |
|
(12.12) |
Необходимость изучения процессов в дискретном времени требует решения задач конструирования и применения нелинейных векторно-матричных моделей в дискретном времени (VND - моделей), которые используют трехмерные матрицы ФN, ГN, размером (n x n xq) и (n x m x q) соответственно (здесь q - число точек линеаризации).
|
(12.13) |
|
(12.14) |
Расположить каждый вид имитационной модели на предложенных выше шкалах, очевидно, можно лишь условно. Это объясняется тем, что практически невозможно каждому виду модели сопоставить определенное значение показателя i - ой шкалы.
Однако, качественная оценка месторасположения каждого вида имитационных моделей на каждой из предложенных шкал представляет несомненный интерес.
Предварительно определим способы оценки показателей шкал для конкретной имитационной модели.
Теоретически
численные значения точности модели
может определяться через показатель
отклонения ![]() “истинного”
поведения исследуемой системы от
результатов “прогона” имитационной
модели.
“истинного”
поведения исследуемой системы от
результатов “прогона” имитационной
модели.
Логично в качестве “истинного” поведения исследуемой системы принимать результаты “прогонов” имитационной модели, построенной на основании имеющегося опыта моделирования родственных систем и информации, имеющейся в базе моделей, базе знаний и базе данных инструментального программно-технического комплекса исследования и проектирования ЭМС.
Если ввести вектор отклонения наблюдаемых координат “истинного” поведения системы
![]()
от соответствующих координат модели zm (t)
|
(12.15) |
то показатель отклонения можно определить следующим образом
|
(12.16) |

где F, Q - постоянные диагональные матрицы весовых коэффициентов, t1, tk - соответственно начальное и конечное значение времени наблюдения.
Так как получить истинную модель в смысле абсолютно точного воспроизведения всех динамических процессов
![]()
практически невозможно, то показателем точности будем считать величину обратную показателю отклонения, т.е.
|
(12.17) |
Очевидно, что наивысший показатель сложности РT может быть получен при использовании физико-математических моделей. Но так как их использование ограничено определенными техническими трудностями реализации и необходимостью обеспечения режима реального времени, наибольший интерес представляют все-таки чисто программные модели, качественное распределение которых по шкале точности приведено на рис. 12.2.

Рис. 12.2. Шкала точности
Вслед за FM- моделями располагаются NVS-модели. Так как NVS- модели позволяют имитировать подавляющее большинство динамических и алгоритмических свойств ЭМС.
Минимальные показатели точности имеют L и VML- модели, т.к. описание в классе непрерывных линейных дифференциальных уравнений является самым приближенным.
Для оценки сложности структурных моделей всех видов будем использовать так называемую топологическую сложность, которая определяется суммой порядков передаточных функций каждого базового элемента структурной модели математического уровня и суммарной сложностью элементов каждого класса, кроме линейных инерционных элементов.
|
(12.18) |
где NS - общее число элементов структурной модели математического уровня; mi, ni - порядок числителя и знаменателя i-го элемента; r- число классов используемых элементов (нелинейные, специальные, алгоритмические и т. п.), Nr - число элементов каждого класса, Cjk - сложность k-го элемента j-го класса.
Определение сложности Cjk элементов каждого класса не поддается формализации. Поэтому, она определяется интуитивно в процессе создания и эксплуатации программно-технического комплекса имитационного моделирования и функционального проектирования ЭМС.
Сложность векторно-матричной модели СВММ будем оценивать как
СВММ = (n + m)l, |
(12.19) |
где n - число переменных состояния ВММ, m - число входных переменных, l - число точек линеаризации для VNN и VND- моделей.
Качественное расположение структурных и векторно-матричных моделей по шкале сложности, основанное на выражениях (12.19)- (12.19)приведено на рис. 12.3.

Рис. 12.3 Шкала сложности
Концепция структурного моделирования, представленная в первой части курса, предусматривает использование единого внешнего представления структурных моделей в виде функциональных блоков, выделяемых преимущественно по физическому назначению. Аппарат вложенных функциональных блоков позволяет представить структурную модель в виде, максимально соответствующем функциональной схеме ЭМС. Поэтому по степени формализации внешнего представления структурные модели всех видов неразличимы, т.к. ориентированы, прежде всего, на пользователя, а не на ЭВМ.
Векторно-матричные модели, базирующиеся на теории пространства состояний, имеют достаточно высокий показатель формализации и являются наиболее приемлемыми для реализации на ЭВМ. С учетом вышеизложенного качественное расположение моделей на шкале формализации приведено на рис. 12.4.

Рис 12.4 Шкала формализации
Наименьшие затраты компьютерной реализации модели требуется при представлении последней в виде модели алгоритмического уровня, т.е. в виде некоторой схемы, элементы которой используются непосредственно для планирования вычислительного процесса. Высокий уровень формализации ВММ значительно приближает их к моделям алгоритмического уровня. Поэтому, наименьшую сложность компьютерной реализации имеют VML, VLD- модели. Некоторое увеличение сложности реализации наблюдается для VNN и VND-моделей, которое объясняется необходимостью обработки переменной структуры этих моделей.
Качественное расположение моделей на шкале реализации приведено на рис. 12.5

Рис. 12.5 Шкала реализации
Быстродействие конкретной модели в значительной мере определяется быстродействием используемой ЭВМ и быстродействием применяемых методов численного интегрирования дифференциальных уравнений. Но, так как эти составляющие для конкретных ЭВМ и методов численного интегрирования неизменны, их можно не учитывать при разложении моделей на шкале быстродействия.
Действительная оценка времени “прогона” любого вида имитационной модели может быть получена на основании статистических сведений о задачах. Для этого введено понятие эффективного быстродействия, под которым понимается математическое ожидание отношения сложности задач к математическому ожиданию времени решения этих задач
|
(12.20) |

где С - сложность модели, Р(с) - плотность распределения вероятности появления задачи сложности С, tC - математическое ожидание времени “прогона” модели сложности С.
Анализ выражения (12.20)показывает, что время “прогона” конкретного вида модели в определенной степени пропорционален сложности этой модели.
Если в качестве показателя быстродействия принять величину, обратную времени “прогона” модели, качественное расположение моделей на шкале быстродействия принимает вид, представленный на рис. 12.6.

Рис. 12.6 Шкала относительного быстродействия
Контрольные вопросы к лекции No 12.
Дайте общее определение структурной модели. Определите структурные модели математического уровня.
Какие модели называют линейными непрерывными моделями (L – моделями)?
Какие модели называют нелинейными непрерывными моделями (N – моделями)?
Какие модели называют нелинейными непрерывно-дискретными моделями ((ND -– моделями)?
Какие модели называют нелинейными непрерывно-дискретными нестационарными моделями ((NVS – моделями)?
Какие модели называют физико-математическими моделями ((FM - моделями)?
Какие модели называют линейными векторно-матричными моделями в непрерывном времени (VML -моделями)?
Какие модели называют линейными векторно-матричными моделями в дискретном времени (VNN -моделями)?
Какие модели называют нелинейными векторно-матричными моделями в непрерывном времени (VLD -моделями)?
Какие модели называют нелинейными векторно-матричными моделями в дискретном времени (VND -моделями)?
Шкалы каких показателей предлагается использовать при ранжировании математических моделей электромеханических систем?
Какие виды моделей имеют наименьшие значения показателя точности?
Какие виды моделей имеют наибольшие значения показателя сложности?
Какие виды моделей имеют наибольшие значения показателя формализации?
Какие виды моделей имеют наименьшие значения показателя реализации?
Какие виды моделей имеют наибольшие значения показателя быстродействия?
ОТВЕТЫ
No задания |
Ответ |
1 |
Структурная модель - некоторая схема из взаимосвязанных элементов, выделяемых по физическому назначению или выполняемой математической функции. На математическом уровне, который является базовым для пользователя, структурная модель представляет собой совокупность блоков уравнений, которые выполняются по функциональному или физическому принципу, что позволяет легко формировать модели, близкие по структуре реальной технической системе. Графическое представление структурных моделей на этом уровне в определенном смысле соответствует традиционной структурной схеме. |
2 |
Линейные непрерывные модели, т.е. модели, построенные на базе линейных непрерывных дифференциальных уравнений, коэффициентов передачи и передающих функций элементов (L - модели). |
3 |
Нелинейные непрерывные модели - модели, построенные на базе нелинейных непрерывных дифференциальных уравнений (N - модели). |
4 |
Нелинейные непрерывно-дискретные модели - модели, обеспечивающие при сохранении всех свойств N - моделей имитацию динамического поведения системы при непрерывных и дискретных сигналах управления (ND - модели). |
5 |
Нелинейные, непрерывно-дискретные нестационарные модели - модели, обеспечивающие при сохранении всех свойствND - моделей корректную имитацию систем переменной структуры и управляющих алгоритмов (NVS - модели). |
6 |
Физико-математические модели - модели, обеспечивающие при сохранении свойств моделей предыдущих видов включения в свою структуру реальных элементов ЭМС и имитацию процессов в режиме реального времени (FM - модели). |
7 |
Модель вида
где А, B, C, D - матрицы размера (n x n), (n x r), (m x n),(m x r) соответственно, описывающая динамическое поведение системы в классе линейных непрерывных стационарных систем и с точки зрения математического описания процессов полностью соответствующая структурной линейной непрерывной модели (L - модели) называют линейной векторно-матричной моделью в непрерывном времени (VML -моделью). |
8 |
Векторно-матричную модель в дискретном времени, представленную системой разностных уравнений, которая для периодического квантования с периодом Т=1 (принимается только для простоты записи) имеет вид:
где
называют линейной векторно-матричной моделью в дискретном времени (VLD- моделью). |
9 |
Векторно-матричную модель вида
полученную с использованием трехмерных матриц AN, BN, размером (n x n x q) и (n x m x q) соответственно, объединяющую q - VML- моделей, полученных в q точках линеаризации нелинейной системы, называют нелинейной векторно-матричной моделью в непрерывном времени (VNN-моделью). |
10 |
VNN-модель в дискретном времени вида:
использующую трехмерные матрицы ФN, ГN, размером (n x n x q) и (n x m x q) соответственно (здесь q - число точек линеаризации) называют нелинейной векторно-матричной моделью в дискретном времени (VND - моделью). |
11 |
Для ранжирования математических моделей электромеханических систем предлагается использовать следующие шкалы: точности, сложности, формализации, реализации и быстродействия |
12 |
L - и VML –модели. |
13 |
FM–модели |
14 |
VML -,VNN -, VLD - и VND –модели |
15 |
VML -, VLD –модели |
16 |
VLD –модели |
Лекция No 13.
Тема: «Основные направления конструирования моделей электромеханических систем»
Практическое применение рассмотренных в предыдущей лекции математических моделей ЭМС требует решения проблемы конструирования каждого вида моделей. Рассмотрим основные направления ее решения для двух вариантов имеющейся исходной информации. В первом варианте предполагается, что известны структура системы и область допустимых изменений ее параметров. Второй вариант соответствует неполной информации об объекте управления.
Конструирование модели связано с определением факторов, оказывающих решающее влияние на функционирование системы, поиском средств математического отображения реальных процессов, разного вида преобразованиями и упрощениями. Поэтому конструирование модели является творческим процессом, в котором решающую роль играет исследователь или проектировщик. Для последнего свойственна работа с графическими объектами (схемами, графиками, диаграммами и т. п.), так как представление логических условий работы технических объектов в двухмерном и трехмерном пространстве считается наиболее удобной и читаемой формой общения проектного и эксплуатационного персонала.
Поэтому, наиболее целесообразной формой первоначального представления любого вида математической модели должна быть некоторая схема, приближающаяся к виду, традиционному для специалистов в области электромеханических систем. Указанным требованиям отвечает структурная модель функционального уровня, которая представляет собой схему соединения физических элементов или их отдельных частей. Так как схема структурной модели функционального уровня не содержит во внешнем представлении информации о внутреннем содержании каждого функционального блока, она может быть единой для всех видов структур и даже векторно-матричных моделей.
Это обеспечивается наличием в базе моделей всех видов моделей необходимых физических элементов системы или наличием в составе программного обеспечения комплекса (или в составе базы знаний) алгоритмов и программ автоматизированного преобразования моделей.
Общая схема конструирования различных видов моделей приведена на рис. 13.1.
На основании исходного описания исследуемой системы и требований к создаваемой модели, содержащихся в техническом задании, с учетом информации, имеющейся в базах моделей, данных и знаний, может быть синтезирована на экране рабочего терминала схема модели заданного вида (на рис. 13.1 это представлено как ввод 2 для всех видов структурных моделей математического уровня и ввод 3, ввод 4, ввод 5, ввод 6 - для векторно-матричных моделей) или схема структурной модели функционального уровня. В последнем случае необходимо выполнить в интерактивном режиме определенный набор преобразований моделей, каждое из которых на рис. 13.1 представлено сдвоенной линией со стрелкой и обозначено как Pj j=(1, 2,...,8).
Конкретная цепочка преобразований определяется техническим заданием и наличием необходимых видов моделей отдельных элементов исследуемой системы. Например, если необходимо построить линейную векторно-матричную модель системы в непрерывном времени (VML-модель), то в базе моделей необходимо найти функциональные блоки, внутреннее описание которых построено на базе линейных дифференциальных уравнений, что соответствует использованию только линейных безынерционных и инерционных динамических элементов.

Рис. 13.1. Схема конструирования моделей
Далее с помощью преобразования Р1, которое раскрывает каждый функциональный блок до схемы модели математического уровня, получается L-модель, которая с помощью преобразования Р5 трансформируется в VML-модель. Линейная векторно-матричная модель в дискретном времени (VLD- модель) получается из VML-модели с помощью преобразователя Р6, которое построено путем программной реализации алгоритмов вычисления матричной экспоненты и ее интеграла:

В том случае, если в базе моделей отсутствуют функциональные блоки, позволяющие имитировать динамическое поведение некоторых физических элементов в классе линейных непрерывных систем, потребуется либо предварительная работа по включению необходимых функциональных блоков в базу моделей, либо выполнение некоторой цепочки преобразований по приведению моделей к L- виду. Наибольшая длина этой цепочки Р2 - Р3 - Р4 соответствует наличию хотя бы одного элемента исследуемой системы только самой сложнойNVS- модели. В этом случае путем преобразования Р2 осуществляется переход к стационарным непрерывно-дискретным моделям, затем с помощью преобразования Р3 модель переводится в класс нелинейных непрерывных систем, а преобразование Р4 осуществляет линеаризацию нелинейных элементов модели. Естественно, что по мере продвижения по цепочке Р2 - Р3 - Р4 сужается область определения
исходной модели.
Переход к нелинейным векторно-матричным моделям (VNN, VND- моделям) в непрерывном и дискретном времени осуществляется от нелинейных непрерывных структурных моделей (N-моделей) путем вычисления якобианов на конечном множестве точек линеаризации (преобразования Р7 ) и перевода множества полученных ВММ в дискретное время с помощью преобразования Р8.
Исходной информацией технического задания является полученная в результате соответствующих проектных процедур и операций функциональная схема ЭМС, представляющая собой схему из взаимосвязанных физических элементов. Причем связи здесь могут быть как энергетическими, так и информационными, так как функциональная схема иллюстрирует принцип функционирования системы.
Конструирование моделей ЭМС, связанной с заменой графического представления каждого физического элемента внешним представлением соответствующего функционального блока и определением структуры внешних соединений блоков, является логико-эвристическим процессом.
Поэтому его необходимо проводить в интерактивном режиме взаимодействия с комплексом вычислительных средств.
Введем следующие понятия:
Е={e1, е2, е3,..., еq} - множество физических элементов, которые могут быть использованы для синтеза функциональной схемы ЭМС. Внешне каждый элемент множества Е представляется фрагментом графического изображения, примеры которого для отдельных элементов приведены на рис. 13.2, а.
Mf-e={m1,
m2,...}
- множество внешних представлений
структурных моделей физического
элемента ![]()
Примеры элементов множества Мf-e приведены на рис. 13.2, б.
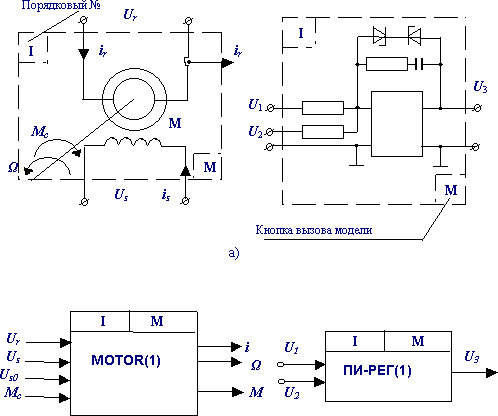
Рис. 13.2 Варианты внешнего представления физических элементов (а) и их структурных моделей функционального уровня.
Ml={l1, l2,...}- множество внутренних описаний функционального блока
![]() .
.
Каждый элемент этого множества представляет собой структурную модель математического уровня, построенную в классе линейных непрерывных систем (L- модель).
Mn={n1, n2,...}- множество внутренних описаний функционального блока
состоящее из набора N- моделей как элементов.
Mf-e={m1, m2,...} - множество внешних представлений структурных моделей физического элемента
Md={d1, d2,...} - множество внутренних описаний функционального блока
,
состоящее из набора ND- моделей как элементов.
Ms={s1, s2,...}- множество внутренних описаний функционального блока
,
состоящее из набора NVS- моделей как элементов.
Опираясь на предыдущие понятия, будем называть
S={Ml, Mn, Md, Ms.} |
(13.1) |
множеством вариантов внутреннего описания функционального блока mi c помощью структурных моделей математического уровня.
Тогда под множеством
V={Mp, Mr, Ml-d, Mn-d} |
(13.2) |
будем понимать множество вариантов описания внутренней структуры функционального блока с помощью векторно-матричных моделей. Здесь
Mp={p1, p2,...}, Mr={r1, r2,...}, Ml-d={t1, t2,...}, Mn-d={q1, q2,...}- множества внутренних описаний функционального блока
![]() ,
,
соответственно состоящие из наборов VML, VNN, VMD, VND- моделей.
Таким образом, процесс конструирования моделей можно представить как процесс последовательного поиска некоторого отображения, которое элементам моделируемой системы ставит в соответствие элементы моделирующей системы.
На начальном этапе конструирования модели моделируемой системы является функциональная схема или схема внешних соединений. Полем такой системы являются физические элементы, то есть элементы множества Е, а ее характеристиками энергетические и информационные связи между элементами.
Моделирующей системой здесь является структурная модель функционального уровня, полем которой являются функциональные блоки (макромодели), то есть элементы множества
,
а характеристиками - информационные связи между блоками.
Функциональная схема ЭМС является промежуточным результатом функционального проектирования. Сформулируем основные требования к ней и средствам ее обработки в контексте конструирования структурной модели.
1. Функциональная схема должна выводиться на экран монитора рабочей станции системы проектирования с целью:
предварительной оценки результатов промежуточного проектного решения;
изменения типа отдельных элементов;
редактирования конфигурации схемы и внешних соединений элементов.
2. Должна быть обеспечена возможность автоматизированного форматирования в другом окне монитора схемы структурной модели функционального уровня путем выполнения следующих основных действий:
поиск во множестве отображения каждого элемента функциональной схемы и вывод его на соответствующее место экрана монитора;
изображение дополнительных блоков, обеспечивающих имитацию требуемых законов изменения управляющих и возмущающих сигналов;
- редактирование конфигурации модели и внешних соединений блоков.
На последующих этапах схема структурной модели функционального уровня должна наполниться конкретным содержанием. То есть каждому функциональному блоку ставится в соответствие структурная модель, выбираемая из множества S с учетом требований технического задания на моделирование.
Конкретный вариант структурной модели математического уровня, необходимый для идентификации каждого функционального блока, определяется эвристически из условий технического задания на моделирование путем выбора вида модели из четырех множеств Ml, Mn, Md, Ms и самой модели как элемента одного из выбранных множеств.
В базе моделей каждому физическому элементу ставится в соответствие матрица моделей этого элемента.
В общем случае матрица моделей представляется как двухмерный или трехмерный массив.
При
двухмерном представлении каждая строка
матрицы в соответствующих ячейках
содержит соответственно информацию о
внешнем графическом представлении
функционального блока (элемент
),
о вариантах структурных (множества ![]() )
и векторно-матричных (множества
)
и векторно-матричных (множества ![]() )
моделей элемента.
)
моделей элемента.
Следует отметить, что предложенный способ допускает использование пустых множеств и пустых элементов в матрице моделей.
Значительная часть пустых множеств и пустых элементов приходится на долю векторно-матричных моделей. Это объясняется, прежде всего, тем, что предварительное формирование ВММ всех видов сопряжено с определенными математическими трудностями. Автоматизированные средства решения этой задачи позволяют получить лишь частные численные решения, которые нет смысла заносить в базу моделей.
Кроме того, задача формирования единой векторно-матричной модели системы при заданных ВММ ее функциональных блоков является не менее сложной, чем задача формирования ВММ системы по заданной L- модели этой системы. Поэтому, в большинстве случаев, оказывается наиболее целесообразным автоматизированное получение ВММ необходимого вида по известной структурной модели L- или N- вида. Алгоритмы и программы построения ВММ помещаются в базу знаний и используются для формирования необходимого варианта модели только при поступлении запроса.
Ситуация неполной информации возникает когда в состав проектируемой ЭМС включаются новые неизученные физические элементы, т.е. элементы, математические модели которых отсутствуют в базе моделей. В этом случае предварительно должны быть выполнены работы по формированию моделей необходимого вида. Одним из направлений такого формирования является структурно-параметрическая идентификация моделей физических элементов на основе постановки и обработки результатов натурных экспериментов. Для реализации этого направления необходимо создание специализированного алгоритмического, технического и программного обеспечения.
Контрольные вопросы к лекции No 13
Назовите наиболее целесообразную форму первоначального представления любого вида математической модели.
Что представляет собой моделируемая система на начальном этапе конструирования модели. Укажите ее поле и характеристики.
Что представляет собой моделирующая система на начальном этапе конструирования модели. Укажите ее поле и характеристики.
ОТВЕТЫ
No задания |
Ответ |
1 |
Наиболее целесообразной формой первоначального представления любого вида математической модели являетсяструктурная модель функционального уровня, которая представляет собой схему соединения физических элементов или их отдельных частей. |
2 |
На начальном этапе конструирования модели моделируемой системы является функциональная схема или схема внешних соединений. Полем такой системы являются физические элементы, а ее характеристиками энергетические и информационные связи между элементами |
3 |
Моделирующей системой здесь является структурная модель функционального уровня, полем которой являются функциональные блоки (макромодели), а характеристиками - информационные связи между блоками. |
Лекция No 14.
Тема: «Технологическая схема автоматизации функционального проектирования электромеханических систем»
Согласно определению И.П. Норенкова [11], проектирование - процесс преобразования исходного описания объекта в окончательное описание на основе выполнения комплекса работ исследовательского, расчетного и конструкторского характера.
Функциональное проектирование электромеханических систем представляет собой процесс формирования и рекуррентного преобразования моделей электромеханических объектов и систем управления ими. В качестве моделей здесь предполагается использование концептуальных моделей, отражающих принцип действия, основные части системы и взаимные связи между ними, структурных и векторно-матричных моделей, представляющих собой различия по форме и степени детализации средства математического описания динамических процессов в системе.
Несомненно, что отмеченные преобразования должны выполняться для достижения определенной цели и быть, по возможности, максимально автоматизированы, но не исключать принятия проектировщиком ключевых решений.
Указанные требования могут быть достигнуты при использовании двух концепций автоматизации проектирования. Первой из них является концепция оптимального автоматизированного проектирования. Эта концепция предусматривает, что проектировщик перед началом проектирования может строго сформулировать критерий оптимальности, определить ограничения на различного рода ресурсы и выбрать рациональный алгоритм оптимизации. Однако разговоры об оптимальном проектировании сложных электромеханических систем лишены всякого смысла в отсутствии объективно существующего критерия оптимальности. Практически невозможно найти такие агрегированные показатели, которые позволили бы сделать однозначный выбор из множества альтернативных вариантов системы. Кроме того, проектирование, как правило, начинается в условиях отсутствия достаточной информации для формирования единого критерия.
Вторая концепция основана на том, что формирование целей и условий проектирования происходит в течении всего цикла проектирования на основе интерактивных методов построения моделей принятия решений с использованием формальных и эвристических приемов, на основе имитационных экспериментов.
Адаптация указанной концепции к решению проблемы автоматизации функционального проектирования электромеханических систем и определенная ее модификация позволили сформировать технологическую схему, которая представлена на рис. 14.1 в виде таблицы из 3-х колонок.
Центральная колонка таблицы содержит схему получения основных промежуточных описаний (моделей) ЭМС в процессе преобразования требований технического задания (исходное описание) в прототип ЭМС, содержащий всю необходимую информацию для выполнения этапа схемотехнического проектирования. В левой колонке приведены основные характеристики каждой модели. Правая колонка указывает на проектные процедуры и операции, необходимые для получения соответствующей модели.
Предлагаемая технология автоматизации функционального проектирования ЭМС предполагает использование строгих математических методов и алгоритмов в сочетании с инженерным искусством. Это искусство базируется на знаниях и опыте проектировщиков и мощной экспертной поддержке, осуществляемой средствами специализированной экспертной системы и базы знаний, и представляется в виде создания концептуальных моделей, функциональных схем, структурных моделей ЭМС и принятия ключевых проектных решений.
Общее представление большинства проектных процедур и операций технологической схемы дано в предыдущих параграфах настоящей главы. Здесь лишь рассмотрим процедуры структурно-параметрического синтеза прототипа системы управления. Общая технологическая схема указанной процедуры приведена на рис. 14.2.
Первая проектная операция данной процедуры предусматривает логико-эвристический выбор вида векторно-матричной модели объекта управления j- го уровня и множества V (см. (13.2) в предыдущей лекции). Решение здесь, как правило, принимает проектировщик на основании информации о наличии необходимых моделей в базе моделей, о характерных особенностях объекта, о предполагаемых способах и средствах реализации управляющего устройства. При наличии всех элементов множества V целесообразен первоначальный выбор VML- модели.
Далее для выбранного вида ВММ определяются варианты критерия оптимальности и метод оптимизации с целью применения формальных математических методов синтеза системы управления (СУ). Как правило, критерий оптимальности IК - представляется в виде характеристического уравнения или матрицы состояния эталонной модели. В виде классического квадратичного функционала (Летова-Калмана) представляется IК для автоматизированного решения задачи аналитического конструирования оптимальных регуляторов (АКОР).
Предварительный
структурно-параметрический синтез
выполняется для всех возможных вариантов
постановки такой задачи, т. е. для всех
троек (![]() ,{IK}, {OptK}).
,{IK}, {OptK}).
Каждое полученное решение “доводится” методом имитационных экспериментов со структурными моделями прототипа системы уравнений, являющимися элементами множества S (см. (13.1) в предыдущей лекции). По результатам имитационных экспериментов проектировщик должен принять решения: произвести коррекцию ВММ объекта или перейти к процедуре преобразования полученной модели ЭМС для решения проектных задач системы более высокого уровня иерархии.


Рис. 14.1. Общая технологическая схема функционального проектирования ЭМС

Рис. 14.2. Технологическая схема синтеза прототипа СУ j-го уровня
Контрольные вопросы к лекции No 14
Кратко сформулируйте содержание основных концепций автоматизации проектирования технических систем.
Назовите основные этапы технологической схемы синтеза прототипа системы управления.
ОТВЕТЫ
No задания |
Ответ |
1 |
Первой из них является концепция оптимального проектирования. Эта концепция предусматривает, что проектировщик перед началом проектирования может строго сформулировать критерий оптимальности, определить ограничения на различного рода ресурсы и выбрать рациональный алгоритм оптимизации. Вторая концепция основана на том, что формирование целей и условий проектирования происходит в течении всего цикла проектирования на основе интерактивных методов построения моделей принятия решений с использованием формальных и эвристических приемов, на основе имитационных экспериментов |
2 |
Технологическая схема предусматривает:
|