

Поперечная остойчивость
.pdfvk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
Практический потолок современных пассажирских самолетов соответствует высотам Н=8000…13000м, а время его набора t=20…60мин.
Выше линии теоретического потолка лежит область динамических высот.
Динамическим потолком называется максимальная высота, которую может достичь самолет в неустановившемся управляемом полете за счет израсходования своей кинетической энергии.
Одной из важных характеристик набора высоты является скороподъемность. Это время набора самолетом любой заданной высоты. Определяется скороподъемность методом графического интегрирования
графика VymaxB B (Н). Для этого весь диапазон высот от 0 до НпрB B разбивается на прямолинейные участки, для
каждого участка определяются величины ∆ Н и VByсрB и по формуле
t= HΣпп ∆t = HΣпп ∆H |
|
0 |
0 Vyср |
определяется скороподъемность самолета. Результаты расчета сводятся в таблицу:
Высота Н. м
∆ Н= HiB –B HiB -1B
Vyср =Vyi +2Vyi−1 , м\ с
∆ t, мин
t=∑ ∆ t, мин
171

vk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
По данным таблицы строится график зависимости времени подъема от высоты, который называется барограммой набора высоты (рис. 11.5.4).
Рис.11.5.4. Максимальные вертикальные cкорости и скороподъемность для самолета с различными взлетными массами (m1 < m 2 < m 3))
Если на этом графике провести горизонтальную линию, соответствующую теоретическому потолку, то можно увидеть, что барограмма набора высоты асимптотически приближается к этой линии, не пересекая ее, т.е. время достижения самолетом теоретического потолка равно бесконечности.
Поляра скоростей режима набора высоты представляет собой кривую, огибающую концы векторов VнабB .B Каждая точка поляры соответствует определенному углу атаки.
Для удобства поляру переносят в прямоугольную систему координат с сеткой углов θ (рис.11.5.5, а).
172

vk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
Рис. 11.5.5. Поляра скоростей при наборе высоты
С помощью поляры скоростей можно по известной скорости VнабB B определить α и θ , а также скорости VxB B и VyB .B Для этого из начала координат проводится дуга, радиус которой в масштабе равен VнабB .B Точка пересечения этой дуги с полярой скоростей соответствует углу атаки, на котором производится полет. Проекция вектора скорости VнабB B на ось абсцисс представляет ее горизонтальную составляющую VxB ,B а проекция на ось ординат – вертикальную скорость набора высоты VyB .B Масштаб для VxB B и VyB B берется одинаковым. Угол θ определяется графически.
На поляре скоростей характерными являются следующие точки (рис. 11.5.5, б):
1 – точка пересечения поляры с осью абсцисс соответствует горизонтальному полету на скорости VmaxB B
(θ =0; VyB =0;B ∆ Р =0);
173

vk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
2 – точка касания поляры с прямой, параллельной оси абсцисс, соответствует режиму максимальной
скороподъемности (VymaxB );B
3 – точка касания поляры с прямой, проведенной из начала координат, соответствует режиму наиболее крутого подъема (θ max ).
11.6. Снижение самолета
Снижение самолета теоретически отличается от набора высоты только тем, что угол наклона траектории будет отрицательным.
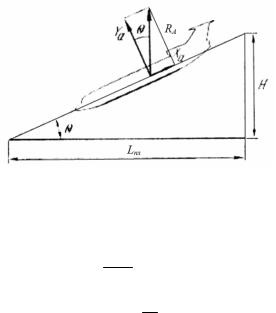
Рис. 11.6.1. Схема сил, действующих на самолет при снижении
Рассмотрим схему сил, действующих на самолет при снижении (рис.11.6.1), уравнения установившегося снижения.
174

vk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
1.Ya = mg cosθ — условиепрямолинейностиснижения;
2.X a = P +mg sinθ — условиеравномерности снижения.
При снижении P < X.
При достаточно большой положительной силе тяги снижение самолета называется скоростным. При скоростном снижении перед посадкой обеспечивается возможность ухода самолета на второй круг.
В особых случаях полета, когда безопасность может быть обеспечена только быстрым уменьшением высоты полета, применяется экстренное снижение. Оно выполняется с максимально возможной вертикальной скоростью, которая достигается за счет увеличения угла наклона траектории снижения и скорости полета по траектории.
|
Планирование |
|
Планированием |
|
|
называется |
пологое |
|
снижение самолета при |
|
|
отсутствии |
силы тяги, |
|
т.е. с выключенными |
|
|
или работающими на |
|
|
малых |
оборотах |
θпл |
двигателями |
|
|
|
|
|
( рис.11.6.2). |
|
|
Сила тяжести G = mg при планировании уравновешивается полной аэродинами-
ческой силой R. |
Рис. 11.6.2. Схема сил при |
Разложив силу тяжести са- |
планировании самолета |
|
175

vk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
молета и полную аэродинамическую силу по осям скоростной системы
координат, получим следующие уравнения установившегося планирования:
Ya = mg cosθ ; X a = mg sinθ ;
При планировании роль тяги выполняет состав-
ляющая веса G 2 = mgsinθ (рис. 11.6.2).
Угол θ между траекторией планирования и горизонтом называется углом планирования.
Угол планирования равен:
mg sinθ |
=tgθ; |
X |
=tgθ; |
tgθ = |
1 |
|
mg cosθ |
Y |
K |
||||
|
|
|
Т.о, угол планирования θ зависит только от аэродинамического качества K и не зависит от веса самолета mg.
При планировании с углом атакиαнв , на котором аэ-
родинамическое качество КBmax,B снижение будет самым пологим.
tgθ пл= |
1 |
. |
|
К max |
|||
|
|
Скорость планирования определяется по формуле:
VплB =B |
2mg cosθпл . |
|
ρ S CYa |
Как видно из формулы, чем больше вес самолета mg, тем больше скорость планированя VплB .B
176
vk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
Дальность планирования — это расстояние по горизонтали, которое самолет пролетает над земной поверхностью при планировании (рис. 11.6.3).
Рис.11.6.3. Дальность планирования
Дальность планирования LBплB определяется следующим образом:
Нпл = tgθ;
Lпл
tgθ = K1 ;
Lпл = Нпл K
Максимальная дальность зависит от высоты планирования и соответствует полету с КBmaxB при планировании на наивыгоднейшем угле атаки.
L max =H пл Kmax
Крутое планирование с углом θ более 30o называется пикированием. Оно применяется для быстрой потери высоты и разгона самолета.
Пикирование с углом, θ равным - 900P ,P называется отвесным пикированием. Согласно уравнениям (1) и (2)
177

vk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
Ya отв.пик. = 0;
X a отв.пик = mg
Cкорость при отвесном пикировании определится по формуле:
Vотв.пик = |
2mg |
|
ρ S Cx0 |
||
|
Поляра скоростей при планировании представляет собой кривую, огибающую концы вектора скорости планирования VплB .B Поэтому каждая точка поляры соответствует определенному углу атаки. Отрезок прямой, соединяющий точку поляры с началом координат,
— вектор скорости планирования VплB .B Проекция этого вектора на ось абсцисс – горизонтальная составляющая скорости планирования VxB ,B а проекция на ось ординат – вертикальную скорость планирования VyB .B
Угол между VплB B и осью абсцисс является углом планирования θ.
Поляра строится в одинаковых масштабах для VxB B и
VyB B (рис. 11.6.4, а).
С помощью поляры скоростей можно по известной скорости планирования VBплB определить угол атакиα , угол наклона траекторииθ , скорости VxB B и VyB .B Для этого из начала координат проводим дугу, радиус которой в масштабе равен VBплB. Точка пересечения дуги с полярой будет соответствовать искомому углу атаки α, а ее проекции на соответствующие оси координат покажут значения VxB B и VyB .B
Соединив полученную точку с началом координат, определим угол планирования θ (угол между соединяющей прямой и осью абсцисс).
178

vk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
Рис. 11.6.4. Поляра скоростей при планировании
На поляре скоростей (рис. 11.6.4, б) характерными являются следующие точки:
1 – точка пересечения поляры с осью ординат соответствует полету на угле атакиα0 , при котором СуB =0,B
VxB =0,B VymaxB ,B θ = - 90o, т.е. самолет выполняет отвесное пикирование;
2 – точка касания поляры с прямой, проведенной из начала координат, соответствует полету на угле атаки αнв , при котором КmaxB ,B LплB .max –B режим максимальной дальности планирования;
3 – точка касания поляры с прямой, параллельной оси абсцисс, соответствует полету на угле атаки αэк ,
при котором VyminB B , θплB min,B а время планирования t плmax
— режим наибольшей продолжительности планирования.
\
179
vk.com/club152685050 | vk.com/id446425943
Основы аэродинамики и гидромеханики
Режимы планирования
Если из начала координат провести прямую, то она пересечет поляру скоростей в двух точках α1 и α2 (рис. 11.6.4,б). А так как угол между этой прямой и осью абсцисс является углом планирования, то значит, самолет может планировать на угле атаки α1 или угле атакиα2 при одном и том же угле планирования θ . Границей двух режимов планирования является угол атаки αнв .
Первый режим планирования (α1 <αнв , V1 >VнвB )B –
планирование на малых углах атаки с большими скоростями. На этом режиме при случайном увеличении угла атаки угол планирования уменьшается, т.е. планирование становится еще более пологим и безопасным. Это благоприятный режим планированияθ .
Второй режим (α2 >αнв , V 2 < VнвB )B – планирование
на больших углах атаки с малыми скоростями. На этом режиме при случайном увеличении угла атаки угол планирования увеличивается, становится более крутым. Кроме того, самолет может оказаться на углах атакиα >αкр , на которых из-за срывного обтекания
крыла коэффициент подъемной силы Суа резко
уменьшается. Подъемная сила становится меньше веса и самолет парашютирует. При парашютировании самолет очень неустойчив, склонен к сваливанию на крыло и переходу в штопор.
11.7. Вираж
180