

Система регуляции опорно‑двигательного аппарата
Под координацией движений понимают процессы согласования активности мышц тела, направленные на успешное выполнение двигательной задачи. Термин «координация» происходит от латинского coordination — взаимоупорядочение. В связи с перечисленными особенностями скелетно-мышечной системы и условиями ее взаимодействия с внешним миром, управление движениями оказывается немыслимым без решения задачи согласования активности большого числа мышц.
Характер этого согласования зависит от двигательной задачи. Так, если нужно взять стакан с водой, то для формирования такого движения центральная нервная система должна располагать информацией о положении стакана относительно тела и о исходном положении руки. Однако, поскольку мы хотим, чтобы это движение было успешным, кисть заранее раскрылась на величину, соответствующую размеру стакана, чтобы сгибатели пальцев сжимали стакан с силой, достаточной для предотвращения проскальзывания, чтобы приложенная сила была достаточной для плавного подъема, но не вызывала резкого отрыва, чтобы ориентация стакана в кисти после захвата все время была вертикальной, т. е. чтобы реализация движения соответствовала двигательной задаче, то необходимы не только данные о пространственных соотношениях, но и разные сведения о свойствах объекта манипулирования. Многие из этих сведений не могут быть получены в ходе самого движения посредством обратных связей, а должны быть заложены в программу предстоящего движения на этапе его планирования. Предполагают, что двигательная память содержит обобщенные классы двигательных программ, из числа которых в соответствии с двигательной задачей выбирается нужная. Эта программа модифицируется применительно к конкретной ситуации: однотипные движения могут выполняться быстрее или медленнее, с большей или меньшей амплитудой. Одна и та же программа может быть реализована разными наборами мышц. В качестве примера на рис. 4.17 приведены образцы почерка при написании слова «координация» правой и левой рукой, а также карандашом, зажатым в зубах, или прикрепленным к носку ботинка.
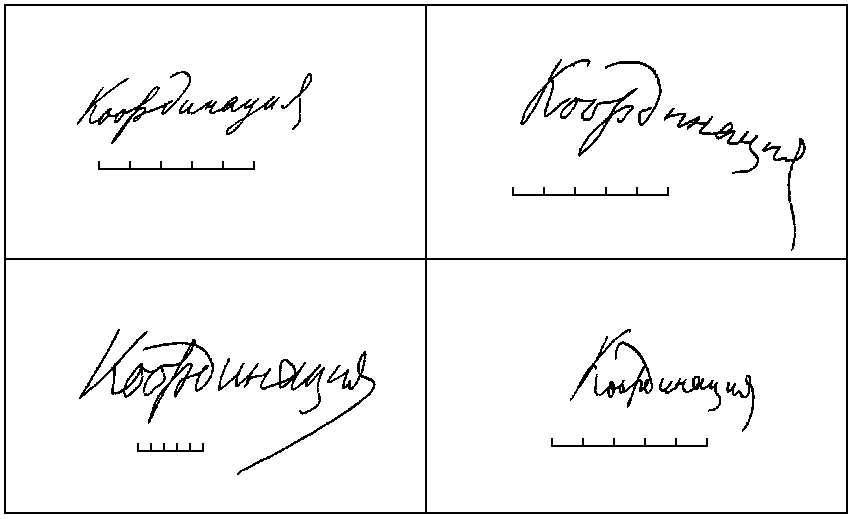
Рис. 4.17. Реализация программы письма разными группами мышц (по Н. А. Бернштейну).
1 — нормальная скоропись пальцами правой руки; 2 — карандаш удерживается зубами; 3 — карандаш прикреплен к носку ботинка правой ноги; 4 — карандаш удерживается пальцами левой кисти. Отметка масштаба внизу каждого факсимиле — 5 см.
Размышление над этим примером приводит нас к важному выводу о том, что уровень планирования движения и уровень его исполнения не совпадают, иначе говоря, система управления движениями является многоуровневой. Действительно, произвольное пространственно ориентированное движение планируется в терминах трехмерного эвклидового пространства: вверх—вниз, вперед—назад, вправо—влево. Для выполнения этого плана необходимо перевести планируемые линейные перемещения в соответствующие угловые переменные (изменения суставных углов), определить, какие мышечные моменты необходимы для этих угловых перемещений, и, наконец, сформировать двигательные команды, которые вызовут активацию мышц, дающую необходимые значения моментов.
В планировании, преобразовании и исполнении двигательной программы участвуют различные структуры нервной системы, организованные по иерархическому принципу. Двигательная программа может быть реализована различными способами. В простейшем случае центральная нервная система посылает заранее сформированную последовательность команд к мышцам, не подвергающуюся во время реализации никакой коррекции. В этом случае говорят о разомкнутой системе управления. Такой способ управления используется при осуществлении быстрых, так называемых баллистических движений.
Чаще всего ход осуществления движения сравнивается с его планом на основе сигналов, поступающих от многочисленных рецепторов, и в реализуемую программу вносятся необходимые коррекции — это замкнутая система управления с обратными связями.
Однако и такое управление имеет свои недостатки. Вследствие относительно малой скорости проведения сигналов, значительных задержек в центральном звене обратной связи и времени, необходимых для развития усилия мышцей после прихода активирующей посылки, коррекция движения по сигналу обратной связи может запаздывать. Поэтому во многих случаях целесообразно реагировать не на отклонение от плана движения, а на само внешнее возмущение еще до того, как оно успело вызвать это отклонение. Такое управление называют управлением по возмущению.
Роль безусловных тонических рефлексов в формировании произвольных движений
В осуществлении координации движений участвуют все отделы центральной нервной системы — от спинного мозга до коры большого мозга. У человека двигательные функции достигли наивысшей сложности в результате перехода к прямостоянию и прямохождению (что осложнило задачу поддержания равновесия), специализации передних конечностей для совершения тонких движений, использования двигательного аппарата для коммуникации (речь, письмо). В управление движениями человека включены высшие формы деятельности мозга, связанные с сознанием, что дало основание называть соответствующие движения произвольными.
На спинальном уровне протекают лишь простейшие координации, тем не менее спинной мозг может осуществлять довольно обширные функции, вплоть до «спинального шагания» у животных (Ч. Шеррингтон). Нервные механизмы ствола мозга существенно обогащают двигательный репертуар, обеспечивая координацию правильной установки тела в пространстве за счет шейных и лабиринтных рефлексов (Р. Магнус) и нормального распределения мышечного тонуса. Важная роль в координации движений принадлежит мозжечку. Такие качества движения, как плавность, точность, необходимая сила, реализуются с участием мозжечка путем регуляции временных, скоростных и пространственных характеристик движения. Животные с удаленными полушариями, но с сохраненным стволом мозга по координации движений почти не отличаются от интактных. Полушария мозга (кора и базальные ядра) обеспечивают наиболее тонкие координации движений: двигательные реакции, приобретенные в индивидуальной жизни. Осуществление этих реакций базируется на работе рефлекторного аппарата ствола мозга и спинного мозга, функционирование которых многократно обогащается деятельностью высших отделов центральной нервной системы.
Механизмы координации движений, роль тех или иных отделов ЦНС в управлении движениями изучаются чаще в опытах на животных, однако объектом исследования естественных движений является преимущественно человек, что обусловлено двумя обстоятельствами. Во-первых, человек в зависимости от задачи исследования может воспроизводить любую требуемую форму двигательной деятельности. Во-вторых, движения человека являются проявлением его поведения и трудовой деятельности и поэтому представляют особый интерес как с теоретической точки зрения вследствие их сложности и дифференцированности, так и с практической — в связи с их значением для медицины, физиологии труда, космонавтики, эргономики, физиологии спорта.