

Министерство сельского хозяйства Российской федерации
федеральное государственное учреждение
высшего профессионального образования
«Ижевская государственная сельскохозяйственная академия»
кафедра «Теоретической механики и деталей машин»
Кинематическое исследование
Пояснительная записка к расчетно-графической работе
по теории механизмов и машин
ТММ 04.05 ПЗ
Выполнил _____________________ Бодалев А.П.
студент 321 гр. МСХ _____________________
Проверил _____________________ Боровиков Ю.А.
профессор, к.т.н. _____________________
Ижевск 2012
Оглавление
Исходные данные……………………………………………………………2
Структурное и кинематическое исследование механизма
Структурное исследование и построение планов механизма…………….3
Определение скоростей……………………………………………………..5
Определение ускорений…………………………………………………….6
Исходные данные
Размеры звеньев
x = 0,68 м; y= 0,74 м;
![]() 0,50
м;
0,50
м;
![]() 0,20
м;
0,20
м;
![]() 0,76
м;
0,76
м;
![]() 1,02
м;
1,02
м;
![]() 0,55
м;
0,55
м;
![]() 0,64
м;
0,64
м;
![]() 0,38
м;
0,38
м;
![]() 0,08
м;
0,08
м;
![]() 0,32
м;
0,32
м;
Угловая скорость кривошипа
![]() 9,5
рад/с
9,5
рад/с
1. Структурное и кинематическое исследование
1.1 Структурное исследование и построение планов механизмов
Структурная схема показана на рисунке 1. Кроме стойки 0 механизм имеет пять подвижных звеньев (n=5): кривошип 1, шатун 2, коромысло 3, шатун 4 и ползун 5. Звенья соединены низшими кинематическими парами пятого класса, число пар p =7; пары четвертого класса отсутствуют (p =0). Названия пар и соединяемые ими звенья приведены в таблице 1.
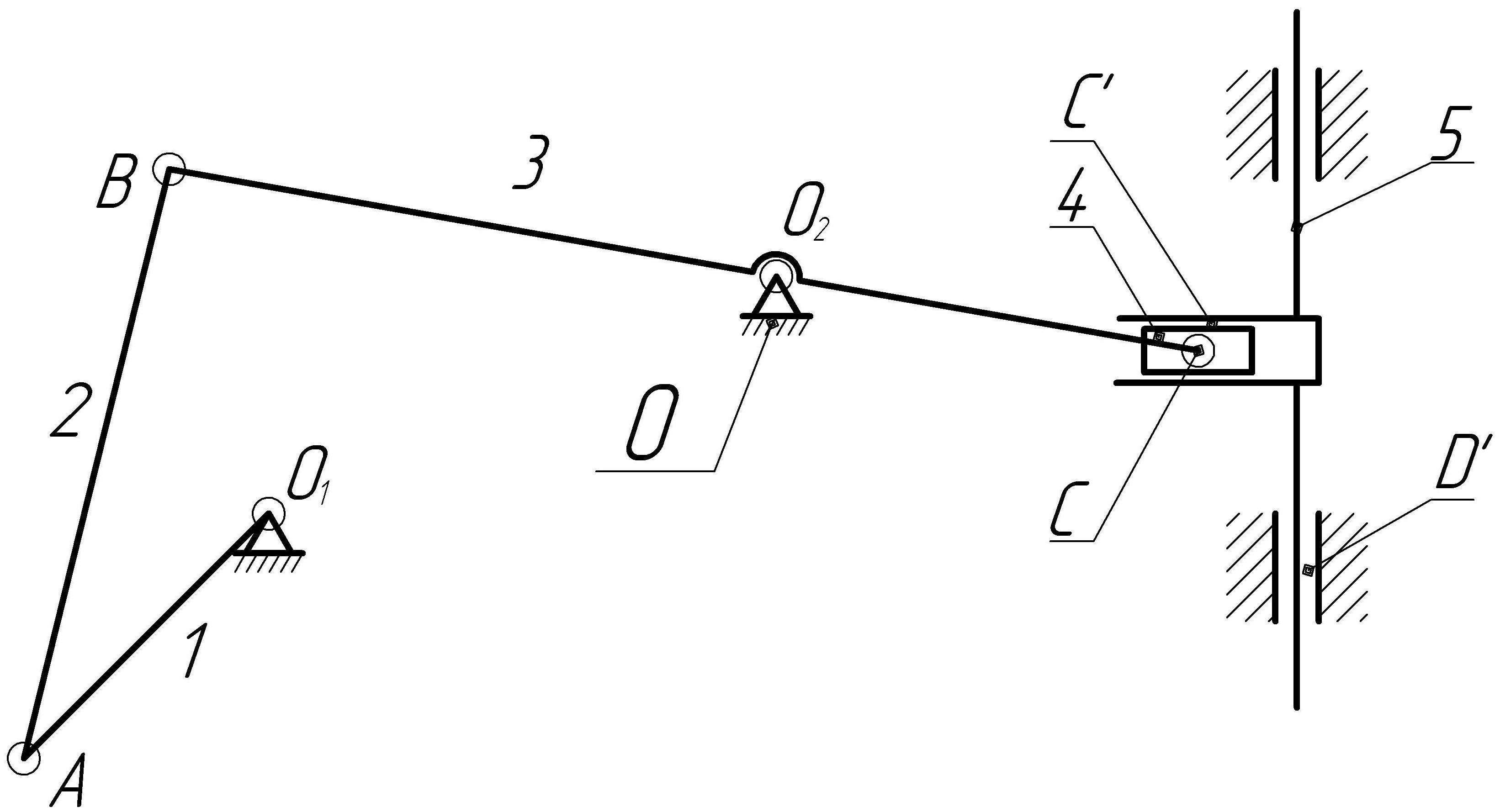
Рисунок 1 – Структурная схема механизма
Таблица 1 – Кинематические пары механизма
Название пары |
Обозначение пары на схеме |
Соединяемые звенья |
Вращательная |
|
0↔1 |
Вращательная |
А |
1↔2 |
Вращательная |
B |
2↔3 |
Вращательная |
|
3↔0 |
Вращательная |
C |
3↔4 |
Вращательная |
D |
4↔5 |
Поступательная |
D′ |
5↔0 |
Степень свободы плоского механизма определяется по формуле Чебышёва:
![]() (1)
(1)
Подставляем значения n,![]() ,
,![]() ,
находим
,
находим
![]()
Ответ показывает, что положение всех
звеньев механизма можно определить,
задавая одну обобщенную координату. В
качестве обобщенной координаты удобно
выбрать угловую координату
![]() ,
определяющую положение кривошипа 1.
,
определяющую положение кривошипа 1.
Разобьем механизм на структурные группы.
Кривошип 1 со стойкой 0 (рисунок 2 а)
образуют группу начальных звеньев –
«начальный механизм» первого класса,
степень свободы которого
![]() .
Звенья 2 и 3, рисунок 2 б, образуют первую
присоединенную группу Ассура второго
класса, звенья 4 и 5 (рисунок 2 в) образуют
группу Ассура второго класса. Следовательно,
выбирая кривошип 1 в качестве начального
звена, получим механизм второго класса.
.
Звенья 2 и 3, рисунок 2 б, образуют первую
присоединенную группу Ассура второго
класса, звенья 4 и 5 (рисунок 2 в) образуют
группу Ассура второго класса. Следовательно,
выбирая кривошип 1 в качестве начального
звена, получим механизм второго класса.
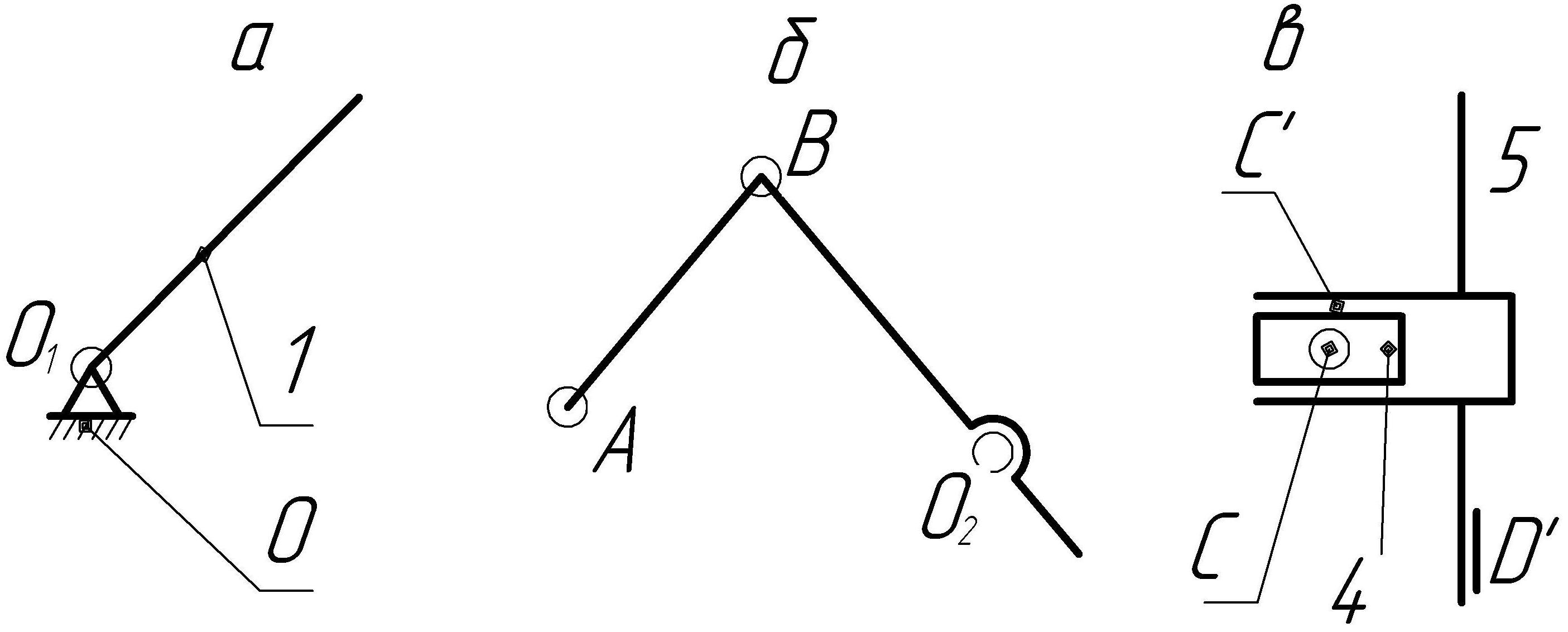
Рисунок 2 – Структурные группы механизма
Восемь последовательных
планов положений (кинематических схем)
механизма строим на одном чертеже через
равные углы поворота кривошипа,
выбирая масштабный коэффициент
![]() 0,005
м/мм.
0,005
м/мм.
Траекторию точки А кривошипа (окружность) делим на восемь равных отрезков, начиная с нулевого положения. На границах отрезков обозначаем номера положений точки А по направлению вращения кривошипа. Для каждого положения точки А методом засечек находим положения других точек механизма и тонкими линиями изображаем последовательные положения всех звеньев. Обозначаем номера положений всех точек.