5.3. Модули адаптивного управления
Модули адаптивного управления (МАУ) - это аналого-цифровые преобразователи (АЦП), предназначенные для преобразования аналоговых сигналов, приходящих от адаптивных датчиков, в цифровой код и передачи их в микроЭВМ СУ. В качестве датчиков используются: силомоментные, формирующие сигналы пропорциональные моменту, возникающему в процессе обработки детали; датчики тока (мощности) электродвигателя шпинделя; датчики контроля и диагностики инструмента (акустические, индуктивные, емкостные и др.); датчики контроля и диагностики технологического оборудования (измерительные головки, устанавливаемые вместо инструмента, датчики активного контроля деталей). МАУ замыкают обратные связи соответствующих контуров адаптивного управления. СУ становится адаптивной только при наличии соответствующего программного обеспечения. Использование адаптивного управления позволяет существенно повысить точность обработки изделий на технологическом оборудовании.
При необходимости получения быстродействующих МАУ используются схемы, когда каждый датчик подключается к самостоятельному каналу преобразования (рис. 5.3.1). В случае отсутствия высоких требований к быстродействию МАУ, применяются АЦП с коммутаторами каналов.

Рис. 5.3.1. Схема двухканального МАУ, подключаемого к интерфейсу МПИ
(программный обмен)
Ввод данных в процессор с МАУ (рис. 1) осуществляется в режиме адресного обмена. Основой модуля являются микросхемы АЦП1 и АЦП2. При проектировании могут использоваться схемы внешнего и автоматического запуска АЦП. На рис. 5.3.1 приведена схема с внешним запуском (от процессора). При автоматическом запуске на вход W АЦП подаётся логическая "1" или "0" в зависимости от схемотехнического решения микросхемы (рис. 5.3.2).
В МАУ необходима гальваническая развязка
аналоговой и цифровой части. Для этой
цели используются оптронные пары,
светодиоды которых должны подключаться
к выходам АЦП. При выборе оптопар
необходимо обратить внимание на
следующие их основные характеристики:
напряжение питания, потребляемый
светодиодами ток в рабочем режиме
(должен быть минимальным), частотные
характеристики.
МАУ необходима гальваническая развязка
аналоговой и цифровой части. Для этой
цели используются оптронные пары,
светодиоды которых должны подключаться
к выходам АЦП. При выборе оптопар
необходимо обратить внимание на
следующие их основные характеристики:
напряжение питания, потребляемый
светодиодами ток в рабочем режиме
(должен быть минимальным), частотные
характеристики.
При подключении оптопар к АЦП необходимо учитывать нагрузочную способность его выходов. Если нагрузочная способность выходов недостаточна, устанавливаются промежуточные усилители - элементы с открытым коллектором (ОК) (рис. 5.3.3).
Н екоторые
АЦП имеют выходные регистры с Z-состоянием
(высокоимпедансным). В этом случае
соответствующие выходы регистров
объединяются и к ним подключаются
оптопары (рис. 5.3.4). Это существенно
сокращает количество необходимых
оптопар. Так как выходы оптопар не имеют
буферов, в таких схемах необходимо
устанавливать однонаправленные шинные
формирователи BF.
екоторые
АЦП имеют выходные регистры с Z-состоянием
(высокоимпедансным). В этом случае
соответствующие выходы регистров
объединяются и к ним подключаются
оптопары (рис. 5.3.4). Это существенно
сокращает количество необходимых
оптопар. Так как выходы оптопар не имеют
буферов, в таких схемах необходимо
устанавливать однонаправленные шинные
формирователи BF.
Входные параметры МАУ имеют типовые значения: U=0±10 В, I=0-5 мА, I= 4-20 мА, I=0-20 мА и т.д.
Алгоритм работы процессора с МАУ при внешнем запуске АЦП следующий:
выполняется программный цикл вывода данных, в котором формируется сигнал "запуск" АЦП (длительность сигнала "запуск" равна длительности сигнала /ДЗП);
программный цикл ввода данных, в котором в процессор считываются данные с АЦП вместе с сигналом готовности RDY;
анализируется считанная информация. Если бит готовности в АЦП не установлен, считанные данные аннулируются, и выполняется следующий цикл ввода данных;
если бит готовности установлен, считанная информация используется для управления технологическим процессом.

Рис. 5.3.4. Схема подключения ОГР к АЦП с выходами с Z-состоянием
При автоматическом запуске АЦП с заданным временным циклом периодически осуществляет преобразование входного аналогового сигнала. Поэтому в указанном выше алгоритме отсутствует первый пункт.
Адресный обмен процессора с МАУ не оптимален, т.к. АЦП относятся к достаточно медленным устройствам, и работа с ними отнимает значительное время у процессора. Наиболее целесообразным является использование обмена в режиме прерывания программы. Использование данного режима существенно экономит ресурсы процессора. Инициатором обмена в этом режиме является сигнал готовности RDY АЦП (рис. 5.3.5). Данный сигнал устанавливает триггер требования прерывания ТТП и если прерывание было разрешено (триггер разрешения прерывания ТРП установлен) формирует сигнал запроса прерывания процессора /ЗПР4.
Алгоритм работы процессора в этом случае следующий:
процессор, используя программный цикл вывода данных (по адресу регистра состояния РС), устанавливает триггер разрешения прерывания (ТРП);
процессор выполняет следующий программный цикл вывода, в котором формируется сигнал "запуск" АЦП (длительность сигнала "запуск" равна длительности сигнала /ДЗП). После формирования сигнала "запуск" процессор продолжает выполнение основной программы, а АЦП осуществляет преобразование аналогового сигнала в цифровой код;
АЦП, завершивший преобразование аналогового сигнала, формирует сигнал готовности RDY, который устанавливает триггер ТТП (формируется /ЗПР4);
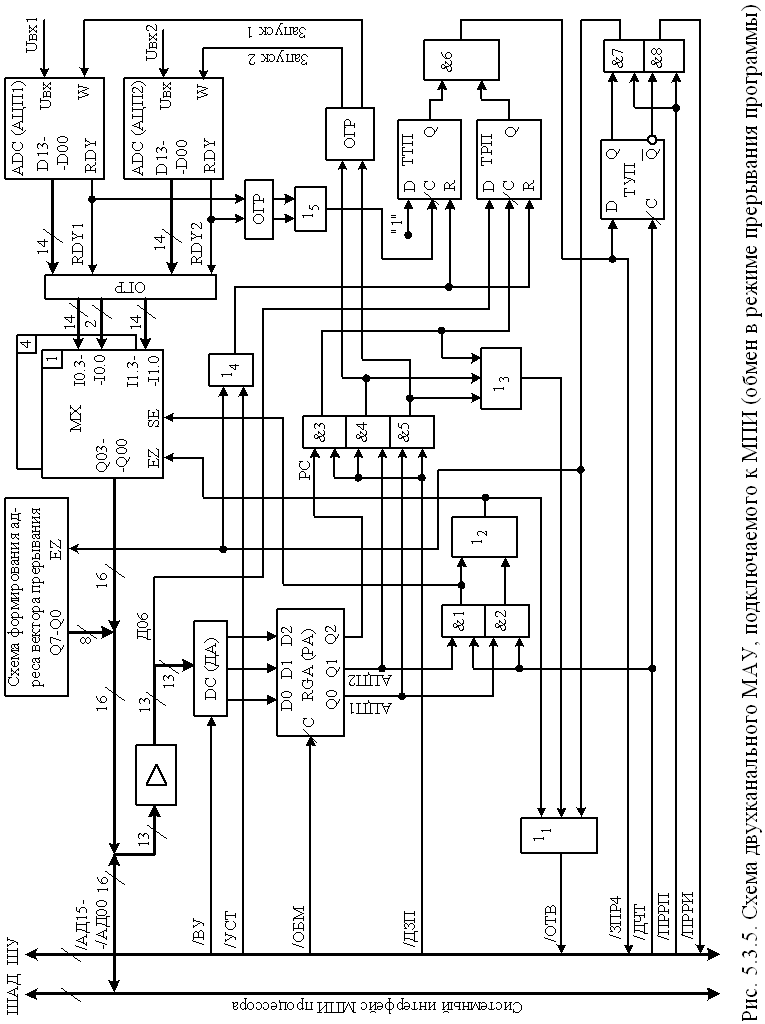
процессор получив сигнал /ЗПР4, выполняет процедуру прерывания, по завершении которой вводится адрес вектора прерывания;
процессор выполняет подпрограмм обслуживания данного прерывания, в соответствии с которой осуществляется ввод данных с АЦП, сформировавшего /ЗПР4. По завершении обслуживания прерывания процессор возвращается к выполнению прерванной программы.
При диагностике модулей необходимо обеспечить контроль работоспособности их основных элементов. В МАУ такими элементами являются АЦП. Одним из вариантов реализации диагностики МАУ является подключение АЦП в процессе диагностики к источнику эталонного напряжения (ИЭН) либо тока (в зависимости от типа входного сигнала МАУ). Подключение ИЭН к АЦП осуществляется посредством коммутатора аналогового сигнала (КАС). В качестве КАС могут использоваться микросхемы аналоговых ключей либо герконовые реле, имеющие малое переходное сопротивление контактов (рис. 5.3.6). ИЭН подключается к входам АЦП при подаче сигнала управления "Диагностика", который может быть сформирован на одном из выходов регистра управления МАУ или триггере диагностики. Данный сигнал должен присутствовать на входах КАС в течение всех циклов обмена в процессе диагностики.

Рис. 5.3.6. Схема организации диагностики в МАУ
Коммутаторы аналоговых сигналов используются также в многоканальных модулях АЦП. Коммутатор каналов может быть встроен в микросхему АЦП (рис. 5.3.7) или быть внешней микросхемой. Для диагностики в этих модулях можно использовать один их входов многоканального коммутатора. Для управления коммутатором используется регистр управления (РУ), в который записывается адрес канала. Схема задержки в этой схеме выполняет две функции: преобразует потенциальный сигнал в импульс "Запуск" АЦП необходимой длительности и задерживает его на время переключения каналов в коммутаторе.
Алгоритм работы процессора с данной схемой аналогичен алгоритму, приведённому к описанию рис. 5.3.1. Отличается тем, что в первом цикле вывода вместе с сигналом "Запуск" в регистр управления записывается номер коммутируемого канала.
 Рис.
5.3.7. Схема восьмиканального МАУ,
подключаемого к интерфейсу МПИ
Рис.
5.3.7. Схема восьмиканального МАУ,
подключаемого к интерфейсу МПИ
(программный обмен)
Рис. 5.3.8. Схема подключения 15-разрядного АЦП к 8-разрядной шине процессора
В случае если разрядность АЦП больше разрядности шины процессора (рис. 5.3.8), необходимо использовать промежуточные буферные регистры РД1 и РД2, в которые информация записывается из выходного регистра АЦП. Сигнал "Запись" может быть сформирован из сигнала готовности АЦП RDY или сформирован процессором реализацией программного цикла, например, аналогично сигналу «Запуск». Затем процессор используя последовательно два программных цикла ввода данных (сигналы "Ввод 1" и "Ввод 2") считывает информацию из РД1 и РД2.
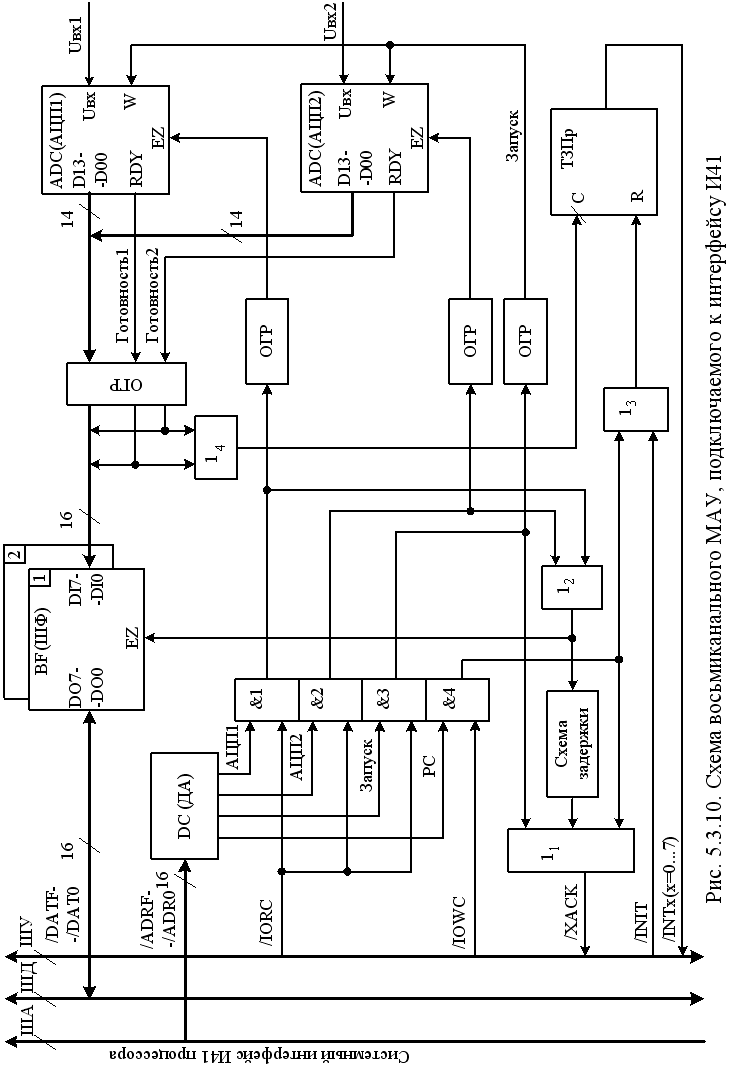
Схемотехнические решения, рассмотренные выше, могут использоваться также для проектирования МАУ, подключаемых к интерфейсу И41. Примеры таких схем приведены на рис. 5.3.9 и рис. 5.3.10.
Отличительной особенностью этих схем является интерфейсная часть модулей, соответствующая системе сигналов и протоколам обмена интерфейса И41.
Рис. 5.3.9. Схема двухканального МАУ, подключаемого к интерфейсу И41