

7.1 Показатель колебательности
Построение границы области заданного запаса устойчивости по частотному показателю колебательности М может осуществляться как по расположению в комплексной плоскости КЧХ разомкнутого контура относительно точки -1, j0, так и непосредственно — построением графика модуля КЧХ замкнутого контура.
ПИ-регулятор имеет два параметра настройки. Соответственно несколько усложняется процесс построения границы области требуемого запаса устойчивости:
1) Строится КЧХ объекта в пределах третьего квадранта комплексной плоскости.
2) Задается некоторое значение постоянной времени интегрирования регулятора Ти и строится КЧХ разомкнутого контура для единичного значения коэффициента передачи регулятора кп = 1.
3)
Строится окружность с центром на
отрицательной вещественной полуоси на
расстоянии u
от начала координат с радиусом,
определяемым формулами
![]() и
и
![]()
![]() (72)
(72)
причем координата центра и подбирается таким образом, чтобы окружность касалась КЧХ разомкнутого контура; такая операция легко выполняется на экране дисплея ПЭВМ.
4) Для того чтобы центр этой окружности занял надлежащее положение, и она стала M-окружностью, значение коэффициента передачи регулятора должно быть вычислено по формуле.
 (73)
(73)
Поиск предельного значения кп при заданном Ти можно осуществлять также, ориентируясь непосредственно на график АЧХ замкнутою контура, резонансный пик которого должен принять заданное значение.
Пример
1. На рис 18,а показан расчет предельного
коэффициента передачи ПИ-регулятора
для объекта с передаточной функцией
для М=1,55
и значения постоянной времени
интегрирования Ти=4.
Вначале строится КЧХ разомкнутого
контура для кп=1,
после чего подбором u
находится координата центра окружности
![]() ,
при которой происходит касание окружности
с КЧХ. Результат расчета предельного
значения коэффициента передачи по
формуле (73): кп=2,635.
На рис. 18,б показана также АЧХ замкнутого
контура.
,
при которой происходит касание окружности
с КЧХ. Результат расчета предельного
значения коэффициента передачи по
формуле (73): кп=2,635.
На рис. 18,б показана также АЧХ замкнутого
контура.
Подобные расчеты выполняются последовательно для ряда значений постоянной времени интегрирования, после чего выбирается оптимальное значение, соответствующее минимуму принятого критерия. При необходимости, по полученным данным может быть построена граница требуемого запаса устойчивости в плоскости параметров настройки регулятора.
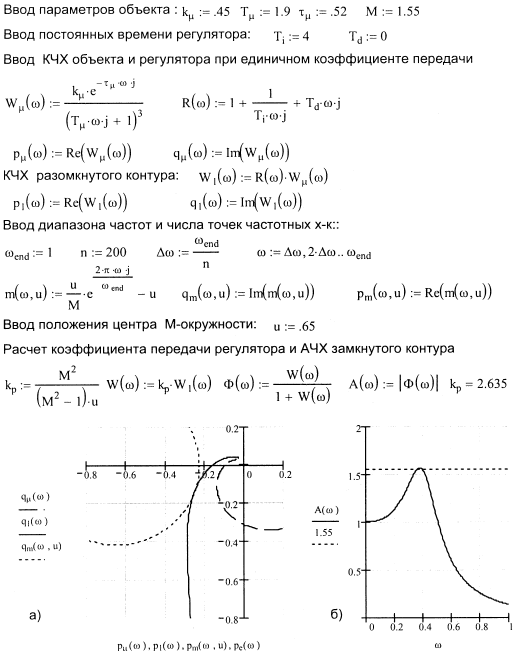
Рисунок 18 – Расчет максимально допустимого значения коэффициента передачи ПИД-регулятора при ограничении на частотный показатель колебательности
Если критерием оптимальности принят линейный интегральный показатель, расчет (как это было сделано и при использовании корневого показателя колебательности) может быть выполнен без построения границы области заданною запаса устойчивости, вместо нее строится график вспомогательной функции, определяемой формулой:
 (74)
(74)
Первый положительный максимум этой функции определяет максимум отношения кп/Ти, а частота, при которой он имеет место, — резонансную частоту контура. После нахождения положения максимума вспомогательной функции оптимальное значение коэффициента передачи и постоянной интегрирования регулятора вычисляют но формулам:
 (75)
(75)
В
(74) и (75) обозначено: (![]() — частота максимума вспомогательной
функции, совпадающая с частотой
резонанса системы при оптимальной ее
настройке;
— частота максимума вспомогательной
функции, совпадающая с частотой
резонанса системы при оптимальной ее
настройке;
![]() — вспомогательная функция и ее
максимальное значение;
— вспомогательная функция и ее
максимальное значение;
![]() — АЧХ и ФЧХ объекта и их значения при
частоте максимума вспомогательной
функции.
— АЧХ и ФЧХ объекта и их значения при
частоте максимума вспомогательной
функции.
Формулы (74), (75) могут быть получены из графического построения КЧХ разомкнутого контура. Взаимное расположение КЧХ объекта и разомкнутого контура при оптимуме настройки регулятора приобретает вид, представленный на рис. 19. Из рассмотрения прямоугольною треугольника ОАС следует:
![]()
где

 т.е.
эти формулы могут быть переписаны
следующим образом:
т.е.
эти формулы могут быть переписаны
следующим образом:

где
![]()
Для
поиска резонансной частоты следует
положить F
функцией
частоты [эта функция определяется
формулой (74)] и определить значение
частоты, при которой вспомогательная
функция
![]() достигнет
максимума. Из второго равенства после
этого находится оптимальное значение
коэффициента передачи, а затем и
оптимальное значение постоянной
интегрирования.
достигнет
максимума. Из второго равенства после
этого находится оптимальное значение
коэффициента передачи, а затем и
оптимальное значение постоянной
интегрирования.
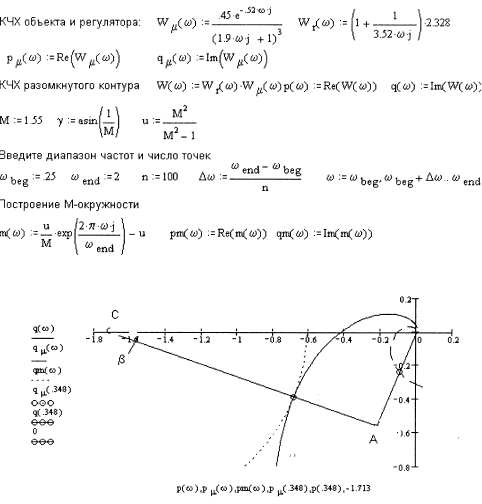
Рисунок 19 – К расчету параметров ПИ-регулятора по вспомогательной функции