

5 Роль и место микромеханических приборов в современной гироскопии
5.1 Тенденции развития современной гироскопии
Кратко остановимся на тенденциях развития современной гироскопии. Сегодня созданы настолько точные гироскопические системы, что дальнейшего повышения точностей многим потребителям уже не требуется, а сокращение средств, выделяемых для военно-промышленного комплекса в бюджетах ведущих мировых стран, резко повысило интерес к массовым гражданским применениям гироскопической техники, которые были ранее на периферии внимания разработчиков.
Наконец, выдающийся прогресс в области высокоточной спутниковой навигации сделал ненужными автономные средства навигации в тех случаях, когда сигнал со спутника может приниматься непрерывно. В настоящее время большинство навигационных задач с очень высокой точностью (доли метра) решается с помощью GPS (Global Position System) и ГЛОНАСС. При этом отпадает необходимость в использовании даже курсовых гироскопов, ибо сравнение показаний двух приемников спутниковых сигналов, установленных на расстоянии в несколько метров, например на крыльях самолета, позволяет получить информацию о повороте самолета вокруг вертикальной оси [15,16].
Можно сказать, что классическая навигация завершила свое эволюционное развитие, обеспечив при этом главным образом узкоспециальные потребности военно-промышленного комплекса и получив сильного конкурента в виде спутниковых навигационных систем, подошла к рубежу, на котором она практически вынуждена сменить приоритеты своего развития [13]. Именно поэтому внимание специалистов в области гироскопии сейчас сосредоточилось на поиске нетрадиционных областей применения приборов.
Однако последние достижения как в области теоретической механики, электроники, информатики, так и при создании новых типов микромеханических гироскопов позволяют ожидать появления новых подходов к решению ряда задач, среди которых важное место занимает навигация и ориентация малых, а также сверхмалых беспилотных летательных аппаратов.
5.2 Основные определения. Погрешности
Долгое время слово гироскоп использовалось для обозначения быстро закрученного вращающегося симметричного твердого тела в кардановом подвесе.
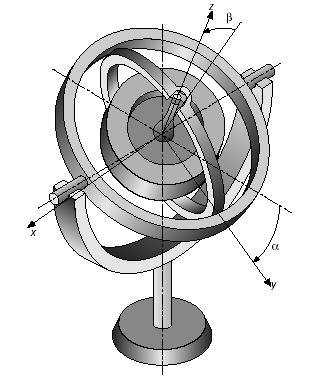
Определение: Карданов подвес представляет собой систему твердых тел (рамок, колец), последовательно соединенных между собой цилиндрическими шарнирами. Обычно при отсутствии технологических погрешностей оси рамок карданова подвеса пересекаются в одной точке — центре подвеса (смотри рис. 5.1). Гироскоп, у которого центр масс совпадает с центром подвеса, называется уравновешенным или свободным.
|
Рис. 5.1. Трехстепенной гироскоп |
Определение: На сегодняшний день развитие гироскопической техники привело к тому, что гироскопами стали называть очень широкий класс приборов, и сейчас термин гироскоп используется для названия устройств, содержащих материальный объект, который совершает быстрые периодические движения. В результате этих движений устройство становится чувствительным к вращению в инерциальном пространстве. При таком понимании слова гироскоп для него необязательно наличие симметричного массивного быстро вращающегося ротора, подвешенного без трения таким образом, чтобы его центр масс совпадал с центром подвеса [15].
Гироскопические приборы можно разделить на измерительные и силовые. Силовые служат для создания моментов сил, приложенных к основанию, на котором установлен гироприбор, а измерительные предназначены для определения параметров движения основания (измеряемыми параметрами могут быть углы поворота основания, проекции вектора угловой скорости и т.д.).
На практике любые средства, используемые для подвеса ротора гироскопа, являются причиной возникновения нежелательных внешних моментов неизвестной величины и направления. Основными погрешностями любого гироскопического прибора является дрейф смещения нуля и нестабильность масштабного коэффициента.
Определение: Дрейф смещения нуля – метрологическая характеристика (характеристика одного из свойств гироскопа, влияющая на результат преобразования и его погрешности), определяемая нестабильностью величины сигнала на выходе преобразовательных каналов гироскопа при отсутствии воздействия (угловой скорости) в виде высокочастотной (шумовой) и низкочастотной составляющих сигнала на выходе [3].
Определение: Нестабильность масштабного коэффициента – нестабильность отношения приращения сигнала на выходе гироскопа к вызывающему это приращение изменению угловой скорости [3].
Сопоставительный анализ будет проведен по дрейфам смещения нуля гироскопов разных типов.