

4. Команды обнаружения нарастающего и спадающего фронта
Эти команды обнаруживают изменение состояния вершины стека в текущем цикле по сравнению с состоянием вершины стека того же блока в предыдущем цикле.
Команда EU («нарастающий фронт») определяет изменение значения в вершине стека от 0 к 1 и при обнаружении этой ситуации записывает в вершину стека единицу; в противном случае в вершину стека записывается 0.
Команда ED («спадающий фронт») определяет изменение значения в вершине стека от 1 к 0 и при обнаружении этой ситуации записывает в вершину стека единицу; в противном случае в вершину стека записывается 0.
Действие команды EU поясняет рис.14,а, действие команды ED – рис.14,б.
(а)
(б)
Рис.14. Временные диаграммы действия команд обнаружения
нарастающего и спадающего фронта
5. Инициализация переменных
Если в программе используются маркеры (промежуточные переменные), то в первом цикле выполнения программы им необходимо присвоить начальные значения (0 или 1). Если этого не сделать, то их начальное значение может быть любым, что может нарушить логику выполнения программы.
Для того чтобы выполнить сброс или установку маркера только один раз в первом цикле выполнения программы, необходимо перед соответствующей командой (S или R) загрузить в вершину стека бит специальной памяти SM0.1. Данный бит автоматически устанавливается равным 1 в первом цикле и равен нулю во всех последующих циклах.
6. Комментарии к программе
Комментарии могут записываться в любой строке программы после текста команды. Комментарию предшествует символ «две косые черты» //.
NETWORK 1
LD М0.1 // Загрузка в стек первого маркера
…
7. Использование идентификаторов
Вместо прямого указания адресов ячеек памяти в программе можно использовать идентификаторы (имена переменных, как в языках высокого уровня). Каждый идентификатор может состоять из букв (в том числе и русских), цифр и символа подчеркивания (но не может начинаться с цифры). Прописные и строчные буквы в идентификаторах различаются, например а1 и А1 считаются различными идентификаторами.
Предварительно в среде программирования Step7Micro составляется таблица идентификаторов (страница Symbol Table), например
Symbol
Address
sensor1
I0.0
sensor2
I0.2
starter
Q0.5
Далее при написании программы можно использовать как сами адреса, так и их идентификаторы. Два следующих фрагмента программы будут равнозначны:
NETWORK 1 LD
I0.0 A
I0.2 =
Q0.5
NETWORK 1 LD
sensor1 A
sensor2 =
starter
Среда программирования step7Micro
Для программирования контроллера требуется персональный компьютер с установленным пакетом STEP 7-Micro. Для ввода текста программы необходимо запустить пакет STEP 7-Micro и вывести на экран окно текстового редактора STL. В пакет также входят редакторы LAD и FBD (работа с которыми здесь не рассматривается). Если на экране один из этих редакторов, то для переключения на редактор STL запустите команду главного меню View\STL. Если на экране вообще нет окна редактора, то для его появления необходимо выполнить щелчок мышью по кнопке Program Block в разделе экрана View (рис.17).
Если выполнить щелчок по находящейся в разделе View кнопке Symbol Table (рис.17), то на экране появится таблица идентификаторов. Идентификаторы могут использоваться либо не использоваться по усмотрению программиста.
При написании текста программы в редакторе STL автоматически происходит контроль ошибок. Ошибочные фрагменты выводятся красным цветом, а строка, содержащая ошибки, отмечается красным крестом. Идентификаторы, которые не описаны в таблице Symbol Table, подчеркиваются зеленой волнистой чертой. Комментарии выводятся зеленым цветом.
После того, как программа написана, выполняется ее компиляция. Для запуска компиляции выполняется щелчок мышью по кнопке Compile (рис.17). Сообщения об ошибках выводятся в окно сообщений внизу экрана (там должна быть надпись: 0 errors). Компиляция будет выполнена автоматически при загрузке программы в контроллер, поэтому отдельно ее можно не выполнять. Программа с ошибками не может быть загружена в контроллер.
Для загрузки программы контроллер должен быть соединен с компьютером кабелем PC/PPI, питание контроллера должно быть включено, и он должен находиться в режиме STOP. Для загрузки программы выполняется щелчок мышью по кнопке Download (рис.17). Появляется окно загрузки (рис.19) из которого подаётся команда загрузки.

Рис.17. Экранные кнопки пакета STEP 7-Micro/WIN.
Программа после загрузки записывается в энергонезависимую память контроллера и сохраняется там после отключения питания. Для того чтобы запускать и останавливать работу контроллера с компьютера, переключатель режимов должен находиться в положении TERM. Для перевода контроллера в режим RUN выполняется щелчок по кнопке RUN (рис.17). Для перевода контроллера в режим STOP выполняется щелчок по кнопке STOP (рис.17).
Вид среды Step7Micro (окно редактора STL) показан на рис.18.
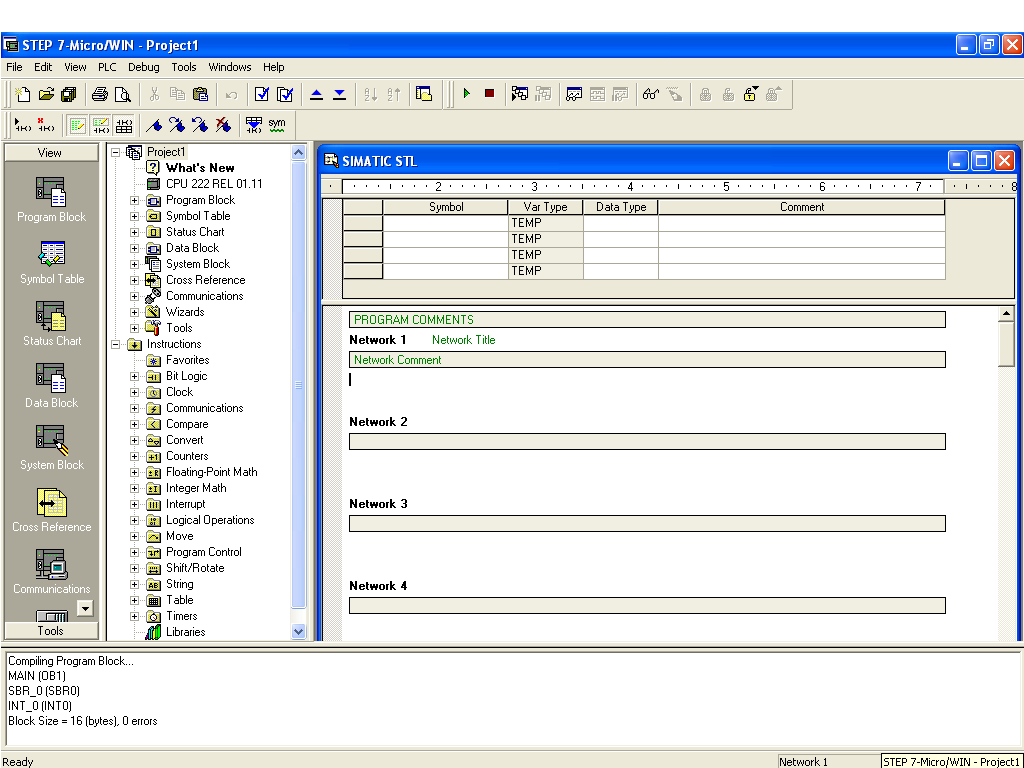
Рис.18. Среда программирования Step7Micro.
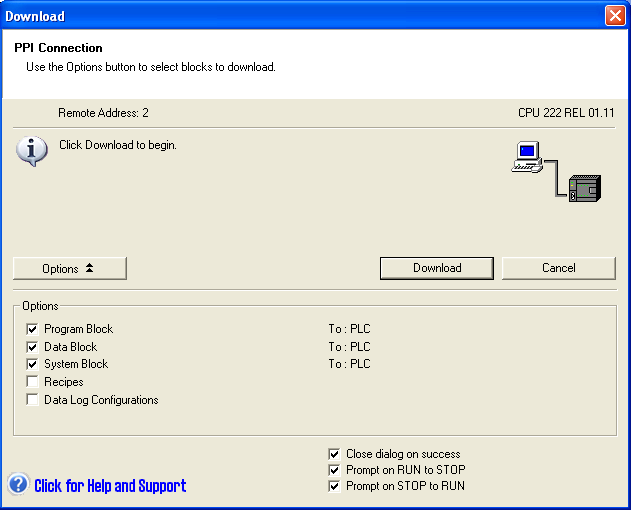
Рис.19. Окно загрузки программы в контроллер
Описание модели лифта
Физическая модель грузового лифта имеет каркас, сваренный из стального уголка. Стены шахты и кабина выполнены из органического стекла, которое крепится к каркасу болтами с гайками. Прозрачный корпус даёт возможность наблюдать за движением кабины. В качестве каната использован капроновый шнур. Кабина движется по двум металлическим направляющим, приваренным к корпусу. Двери шахты также выполнены из органического стекла и движутся по направляющим, приклеенным к корпусу. Всего в шахте находится 4 пары раздвижных дверей, что подразумевает наличие четырех этажей здания.
Привод подъемной лебедки, выполняющий подъём и опускание кабины, выполнен от двухфазного асинхронного двигателя серии РД-09. К корпусу двигателя пристроен понижающий редуктор.
Привод каждой пары дверей шахты выполнен от синхронного двигателя ДСОР 32-15-2 с пристроенным к корпусу понижающим редуктором. Двигатель работает в нереверсивном режиме, т.е. вращается только в одном направлении. При вращении двигателя двери сначала открываются, а затем закрываются с помощью рычажного механизма.
Контроль положения кабины осуществляется с помощью фотоэлектрических датчиков, расположенных на уровнях этажных площадок. Когда кабина оказывается на уровне этажной площадки, прикрепленная к кабине светонепроницаемая пластинка перекрывает световой поток в датчике, в результате чего на выходе датчика появляется напряжение, достаточное для срабатывания выходного реле. Нормально-разомкнутый контакт реле замыкается и подает сигнал в систему управления. Если кабина не находится на уровне этажной площадки, то на выходе фотодатчика напряжение равно нулю, выходное реле отключено, его контакт разомкнут.
Контроль состояния дверей осуществляется с помощью конечных выключателей дверей, на которые воздействует кулачок, находящийся на выходном валу привода дверей. Конечный выключатель замыкается, когда двери приходят в полностью закрытое состояние и остается замкнутым в процессе открывания дверей. Конечный выключатель размыкается, когда двери приходят в полностью открытое состояние и остается разомкнутым в процессе закрывания дверей.
Аварийные конечные выключатели расположены в верхней и нижней части шахты. При наезде кабины на конечный выключатель его контакт замыкается и подает в систему управления сигнал на отключение привода лебедки.
Управление лифтом осуществляется с помощью кнопок и переключателей, расположенных на внешней стороне шахты.
Модель лифта имеет следующие органы управления:
тумблер «Сеть» (подает питание к электрической части лифта);
переключатель режима работы («Ручной»/«Автоматический»);
кнопка «Гл. привод» (предназначена для пуска привода лебедки в ручном режиме);
переключатель «Реверс» (задает направление движения в ручном режиме);
кнопки открывания дверей: «Двери 1эт.», «Двери 2эт.», «Двери 3эт.», «Двери 4эт.»;
четыре кнопки приказа: «1», «2», «3», «4» для автоматического режима.
В ручном режиме привод лебедки будет включен при нажатой кнопке «Гл. привод» (кнопку необходимо удерживать), направление движения задается переключателем «Реверс» (кабина будет двигаться в направлении, куда указывает рукоятка этого переключателя). Привод дверей в ручном режиме будет включен при нажатой и удерживаемой кнопке «Двери» соответствующего этажа.
В автоматическом режиме управление лифтом осуществляется программируемым контроллером Simatic S7-200. Контроллер состоит из главного модуля CPU-222 и модуля расширения EM 221. Главный модуль имеет 8 дискретных входов (0.0, … 0.7) и 6 дискретных выходов (0.0,…0.5). Модуль расширения добавляет дополнительные 8 дискретных входов (1.0, … 1.7).
В таблице 7 приводится соответствие между исполнительными реле лифта и выходами контроллера.
Таблица 7
Реле |
Выход |
При сигнале «1» на выходе: |
Реле управления двигателем лебедки. |
Q0.5 |
Привод лебедки включен |
Реле задания направления движения кабины |
Q0.0 |
Задано направление «вверх» |
Примечание: само по себе реле задания направления не включает привод лебедки, а только задает в каком направлении (на спуск или подъем) будет двигаться кабина при включении привода.
В таблице 8 приводится соответствие между командными устройствами и датчиками лифта и входами контроллера.
Таблица 8
Командное устройство |
Вход |
Сигнал «1» на входе, когда: |
Кнопка приказа на движение к 1-му этажу |
I0.1 |
Кнопка нажата |
Кнопка приказа на движение к 2-му этажу |
I0.2 |
Кнопка нажата |
Кнопка приказа на движение к 3-му этажу |
I0.3 |
Кнопка нажата |
Кнопка приказа на движение к 4-му этажу |
I0.4 |
Кнопка нажата |
Контакт реле фотодатчика 1-го этажа. |
I1.1 |
Кабина на уровне 1-го этажа |
Контакт реле фотодатчика 2-го этажа. |
I1.2 |
Кабина на уровне 2-го этажа |
Контакт реле фотодатчика 3-го этажа. |
I1.3 |
Кабина на уровне 3-го этажа |
Контакт реле фотодатчика 4-го этажа. |
I1.4 |
Кабина на уровне 4-го этажа |
Контакт верхнего конечного выключателя |
I0.0 |
Кабина достигла крайнее верхнее положение шахты |
Контакт нижнего конечного выключателя |
I1.0 |
Кабина достигла крайнее нижнее положение шахты |
