

9. Расчет переходного процесса на основе уравнений состояния
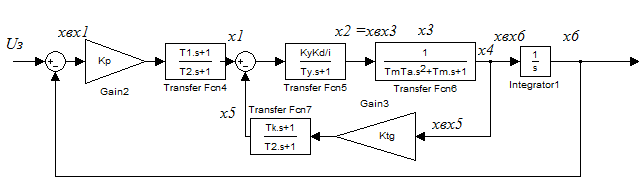
Рисунок 9.1 – Структурная схема системы
САУ можно описать системой дифференциальных уравнений первого порядка.
Для линейных стационарных систем управления уравнения состояния имеют вид:

где:
x(t) – вектор состояния;
y(t) – вектор выходных величин;
u(t) – вектор входных воздействий;
 А
– матрица системы, характеризует её
динамические свойства;
А
– матрица системы, характеризует её
динамические свойства;
В
– матрица управления, характеризует
воздействие входных величин![]() на переменные состояния
на переменные состояния ![]() ;
;
С
– матрица измерения, характеризует
связь выходных координат ![]() с переменными состояния
с переменными состояния
Запишем уравнения состояния для системы изображенной на рисунке 9.1:

Дифференциальные уравнения звеньев, у которых порядок числителя равен порядку знаменателя, имеют следующую особенность: дифференциальное уравнение записывается не относительно выходной величины х, а относительно новой переменной х`. Действительная выходная переменная определяется на основе уравнений связи:
![]()
![]()
Входные значения:
Запишем, подставляя входные значения:

Запишем систему в векторно-матричной форме:
,
где матрицы и векторы имеют вид:
 ,
,
 ,
,
![]() ,
,
![]() ,
,
 ,
,
![]() ,
,
![]() .
.
Подставим значения параметров системы:
 ,
,
 .
.

Рисунок 9.2 - Схема системы в программе Matlab
С помощью полученных уравнений состояния промоделируем переходный процесс с помощь системы MATLAB:
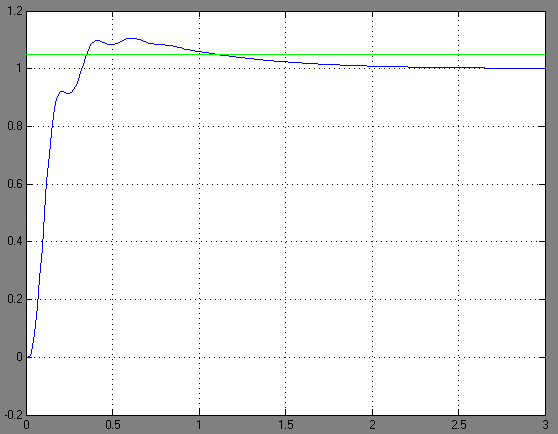
Рисунок 9.3 – Переходный процесс, полученный с помощью уравнений состояния
Показатели качества переходного процесса равны:
перерегулирование σ= 10.54 % < 27%
время регулирования tр= 1.1 с >1.2c
10. Оптимизация процессов в следящей системе

Рисунок 10.1 - Структурная схема для оптимизации
В
данном случае контролируемым параметром
является переходная функция системы.
Оптимизируемыми параметрами являются
параметры корректирующих звеньев
![]() ,
,![]() ,
,![]() ,
,![]() ,
а ограничения, накладываемые на
переходную функцию, задаются в Signal
Constraint
- блоке.
,
а ограничения, накладываемые на
переходную функцию, задаются в Signal
Constraint
- блоке.
Заданные показатели качества переходного процесса:
перерегулирование — 29 %;
время регулирования — не более 1.2 с (при величине зоны 5%).
Параметры до оптимизации:
![]() с,
с,
с,
с,
![]() с,
.
с,
.
Для
того чтобы система вышла из границ
устойчивости, изменим параметр
:
![]() .
.
В итоге получим параметры до оптимизации:
с, с, с, .
Параметры после оптимизации:
![]() с,
с,
![]() с,
с,
![]() с,
с,
![]() .
.

Рисунок 10.2 – Параметры после оптимизации

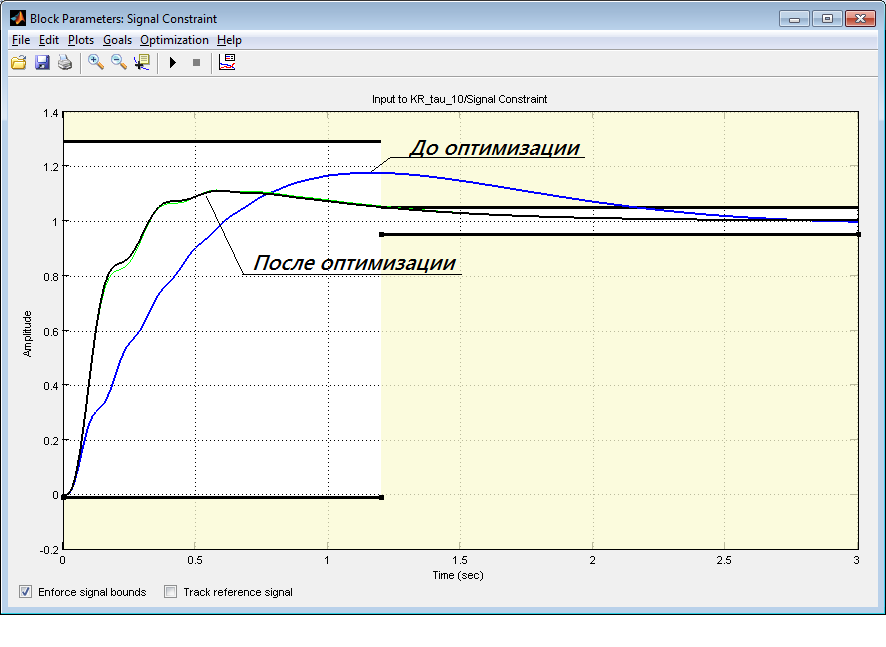
Рисунок 10.3 – Оптимизация переходного процесса

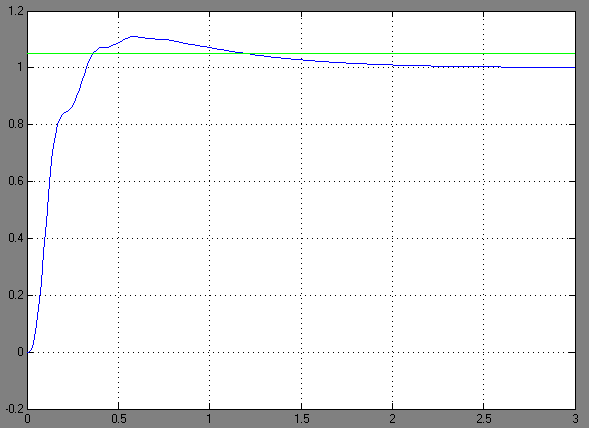
Рисунок 10.4 – Переходный процесс оптимизированной системы
После оптимизации получились следующие показатели качества:
перерегулирование — 10.97%;
время регулирования — 1.2 с (при величине зоны 5%).

Так как полученные показатели качества хуже начальных, то принимаем решение оставить модель с начальными параметрами.
11. Заключение
В результате работы над курсовым проектом была синтезирована система со следующими показателями качества:
ошибка рассогласования εдоп=2.7 град;
время переходного процесса tn= 1.1с;
перерегулирование σ=10.5 %;
запас по фазе γ=70O.
Все показатели качества удовлетворяют заданию.
Для корректировки системы использовалось последовательно-параллельное корректирующее устройство.
