

Выбор регулятора и расчет его настроек
Выбор регулятора произведем с учетом качества регулирования заданного в задании на проектирование. Требуется «обеспечить регулирование без статической погрешности и с перерегулированием в переходном процессе не более 20%».
Регулирование без статической погрешности возможно только если используются ПИ или ПИД законы регулирования. Определим вид выходного сигнала регулятора
о/То = 101,25/46,875 = 2,16 . Вывод: необходим регулятор импульсного действия, т.к 2,16 >1.
Рассчитаем предварительные значения настроек обоих регуляторов.
Для ПИ-регулятора:
Коэффициент усиления Кр=![]()
Время интегрирования Ти=о+0,35*То=101,25+0,35*46,875=117,656с
Для ПИД-регулятора:
Коэффициент усиления Кр=![]()
Время интегрирования Ти=1,3*о=1,3*101,25=131,625с
Время предварения Тп=0,5*о=0,5*101,25=50,625с
Для окончательного выбора регулятора и определения его оптимальных настроек выполним моделирование САУ с выбранными регуляторами в программе «SAMSIM»

Рис.1 Структурные схемы САУ с ПИ- и ПИД-регуляторами
В результате моделирования и поиска оптимальных переходных процессов получены следующие процессы


Рис.2 Переходные процессы в САУ
верхний график-система с ПИД-регулятором,
нижний график – система с .ПИ-регулятором
Настройки регуляторов и показатели качества регулирования представлены в таблице№2
Таблица №2
Таблица сравнения качества работы систем управления
Парам. САУ
Состав САУ |
Настройки регулятора |
Типовой перех. процесс |
Параметры переходного процесса |
|||||
Коэфф. усиления Кр |
Время интегрир. Ти,с |
Время дифф. Тд,с |
Время рег-я Тр,с |
Динам. погрешн. д |
Статич. погр. с |
Степень затухан. ,% |
||
САУ с ПИ-р. |
0,04 |
1700 |
- |
Переходной процесс с минимальной интегральной оценкой |
1300 |
11,54 |
- |
94,454 |
САУ с ПИД-р. |
0,007 |
40 |
30 |
Расходящийся |
|
|
|
|
Вывод: Окончательно выбираем для системы управления ПИ-регулятор, так как при его использовании мы получаем переходной процесс без статической погрешности и с перерегулированием не превышающим 20%.
Построение графика разомкнутой сау с пид?-регулятором
Расчет графика выполним в программе «SAMSIM» с последующим построением в программе «Advanced Grapher»
Структурная схема разомкнутой САУ с генератором качающей частоты (ГКЧ) имеет вид

Таблица расчета точек АФХ разомкнутой САУ
Таблица №3
w |
0.005 |
0.008 |
0.012 |
0.017 |
0.019 |
0.021 |
0.023 |
0.024 |
0.025 |
Re(w) |
-0,29 |
-0,18 |
-0,04 |
-0,007 |
0,068 |
0,001 |
-0,03 |
-0,027 |
0,005 |
Im(w) |
-1,31 |
0,07 |
0,12 |
0,11 |
0,017 |
-0,04 |
-0,004 |
0,007 |
0,007 |
Продолжение таблицы
w |
0,030 |
0,032 |
0,034 |
0,036 |
|
|
|
|
|
Re(w) |
0,003 |
-0,003 |
-0,003 |
0,002 |
|
|
|
|
|
Im(w) |
-0,006 |
-0,006 |
-0,005 |
0,005 |
|
|
|
|
|
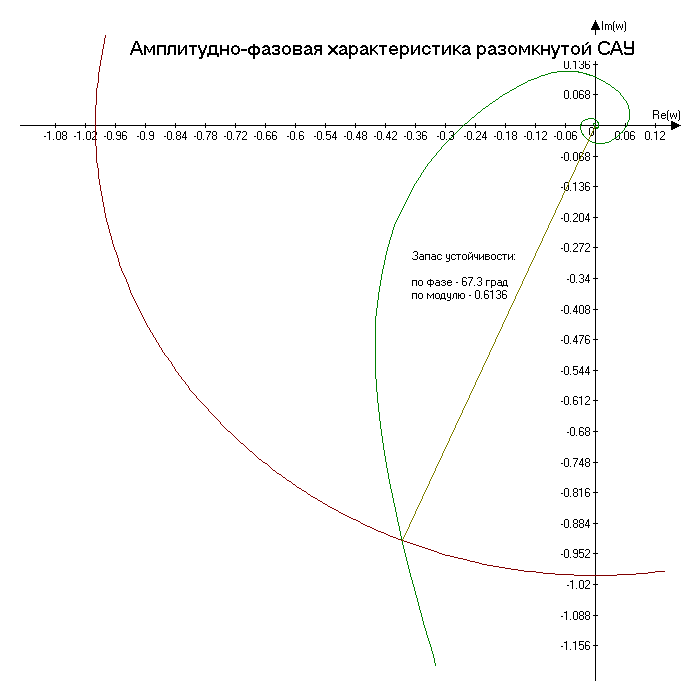
По АФХ разомкнутой САУ определим запас устойчивости для системы с принятыми коэффициентами регулятора и объекта.
Запас устойчивости по фазе 67,30
Запас устойчивости по модулю 0,6136
ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ