

Міністерство освіти, науки, молоді і спорту України
Національний авіаційний університет
Факультет комп’ютерних наук
Розрахунково-графічна робота
з дисципліни: “Математичне моделювання систем і процесів”
“ Рух в боковій площині в земній системі координат ”
Виконала: студентка ФКН УС-502 Морарь Ю.В.
Перевірив: Моржов В.І.
Київ 2012
Зміс
Вступ 3
Завданням даної розрахунково-графічної роботи є розробка та проведення дослідження цифрової моделі руху літака, яким описується рівнянням «Рух у боковій площині в земній системі координат» 3
1. Опис фізичного процесу та інформаційна модель. 4
2. Математична модель 4
3. Обґрунтування алгоритму цифрової моделі. 5
4. Підготовка існуючих даних. 6
5. Написання та налагодження програми. 7
6. Результати моделювання. 10
Початковий вигляд програми при запуску: 10
11
При виборі характеристики: руль напрямку і натиснення «Розрахувати» на вкладці «Розрахунки» бачимо наступне: 11
11
На вкладці «Таблиця» бачимо динамічні характеристики польоту. 11
11
Далі йдуть вкладки з графіками для кутів рискання, ковзання, крену та бічного відхилення для руля напрямку: 11
12
12
12
12
Змінивши характеристику на «Елерони» і натиснувши «Розрахувати» бачимо, що графіки змінили свій вигляд: 12
13
13
13
13
Висновки 13
Виконавши розрахунково-графічну роботу ми навчились будувати цифрову модель руху літака в бічній площині в земній системі координат а також переконались , що літак являється стійким і керованим у бічному русі. 14
Список використаної літератури 14
Вступ 6
1. Опис фізичного процесу та інформаційна модель. 6
2. Математична модель 7
3. Обґрунтування алгоритму цифрової моделі. 8
4. Підготовка існуючих даних. 9
5. Написання та налагодження програми. 10
6. Результати моделювання. 13
Висновки 16
Список використаної літератури 17
Вступ
Завданням даної розрахунково-графічної роботи є розробка та проведення дослідження цифрової моделі руху літака, яким описується рівнянням «Рух у боковій площині в земній системі координат»
Опис фізичного процесу та інформаційна модель.
Провести дослідження двох методів оптимізації и порівняти їх результати на прикладі одного масиву чисел.
Математична модель
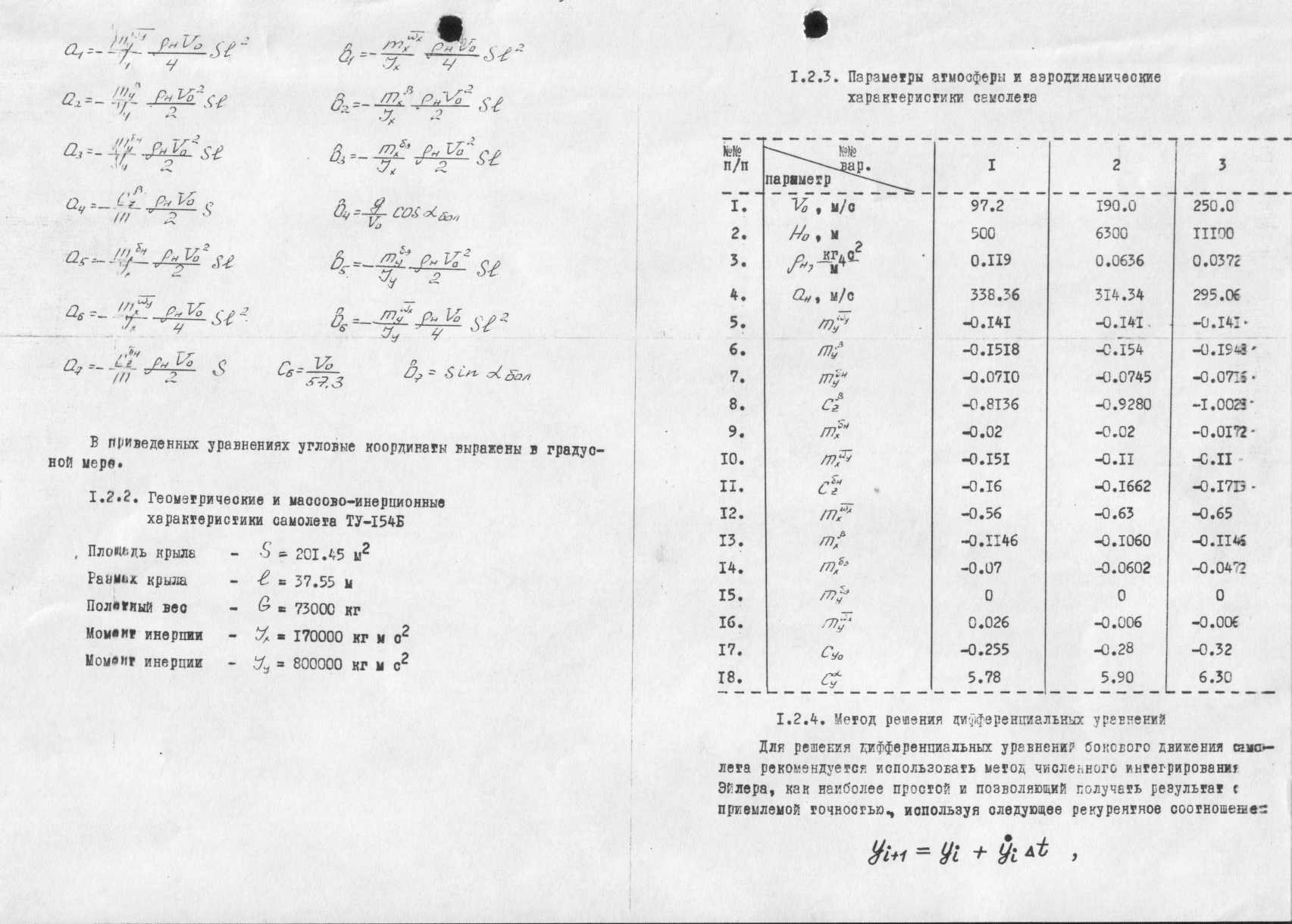
Лінеалізовані диференціальні рівняння руху літака в боковій площині з постійною швидкістю і кутом атаки мають вигляд:
 ,
,
де
Ψ – кут рискання.
g- кут крену (кут між віссю ОУ зв’язаної СК і вертикальною площиною, що проходить через повздовжню вісь ПС);
b – кут ковзання (кут між площиною симетрії ПС і напрямком повітряного потоку, що набігає);
δе – кут відхилення елеронів.
δн – кут відхилення руля напрямку.
Обґрунтування алгоритму цифрової моделі.
Елерони (рулі крену) розташовані на кінцевій частині крила. Якщо лівий елерон відхиляється вниз, то правий вгору, підйомна сила лівої половини крила зростає, а правою зменшується. У результаті виникає момент, літак крениться.
Швидкий рух, що складається з рухів крену і рискання, розвивається в перші кілька секунд після початку дії збурень. Літак при цьому порівняно швидко обертається навколо осей OX і OY, в той час як його центр мас не встигає помітно переміститися вздовж осі OZ.
Виділення швидкого бічного обурення руху літака можливо, якщо кути атаки, тангажу і нахилу траєкторії в не обуреному русі малі, траєкторія польоту під час швидкого руху незмінна, а зміни моменту крену при відхиленні керма напряму - незначно.
Швидкість польоту і кут атаки, визначається з умови рівності в горизонтальному польоті підйомної сили і ваги літака є постійними за величиною.
Для вирішення диференціальних рівнянь бічного руху літака рекомендується використовувати метод численного інтегрування Ейлера, як найбільш простого і дозволяю чого отримувати результат з достатньою точністю, використовуючи рекурентне співвідношення:
Yi+1=
Yi
+
 iΔt,
iΔt,
де Δt – крок інтегрування.