

1 ЗАГАЛЬНА ЧАСТИНА
1.1 Призначення, будова та технічні характеристики
Регулятор напруги — це пристрій, що дозволяє змінювати величину електричної напруги на виході при дії на кнопки управління.
Двохпозиційні регулятори забезпечують хорошу якість регулювання для інерційних об'єктів з малим запізнюванням, не вимагають настройки і прості в експлуатації. Ці регулятори представляють звичайний і найбільш широко поширений метод регулювання.
Для управління інерційним навантаженням часто застосовуються тиристорні регулятори потужності, що працюють за принципом подачі на навантаження декількох напівперіодів мережевої напруги з наступною паузою. Перевагою таких регуляторів є те, що моменти комутації тиристорів збігаються з моментами переходу мережевої напруги через нуль, тому рівень радіоперешкод різко знижений. Крім того, такий регулятор, на відміну від регулятора з фазовим керуванням, не містить аналогових порогових елементів, що збільшує стабільність роботи і спрощує настройку. Оскільки комутація навантаження відбувається тільки в моменти переходу мережевої напруги через нуль, мінімальна порція енергії, яка надходить в навантаження, дорівнює енергії, споживаної навантаженням за один напівперіод. Тому для зменшення кроку регулювання потужності доводиться подовжувати повторювану послідовність напівперіодів.
Регулятор потужності використовується для керування яскравістю ламп освітлення. Може також використовуватися для регулювання оборотів колекторних двигунів або нагрівальних приладів. Принцип дії його полягає в регулюванні фази включення семистора щодо фази напруги. При цьому залежно від часу включеного стану сіммістора змінюється і струму у навантаженні.
Бодова регулятора потужності на мікро контролері: основою регулятора потужності є мікроконтроллер DD1 типу AT89C2051 фірми ATMEL. Для живлення схеми регулятора використовуться малопотужний трансформатор T1, що разом із застосуванням оптотиристором забезпечує гальванічну розв’язку від мережі. Регулювання потужності в навантаженні здійснюється за допомогою кнопок SB1 і SB2. Для індикації потужності в навантаженні служать світлодіодні семисигментні індикатори HG1 — HG3.У схемі так використовуються: транзистори VT1-VT4, діодний мост VD1-VD6, мікросхема DA1(КР142ЕН5А), резистори R1-R18, перемичка S1, конденсатори С1-С6.
Технічна характеристика регулятора потужності на мікро контролері приведені в таблиці 1.1.
Таблиця 1.1 – Технічна характеристика регулятора потужності на мікроконтроле6рі
Параметр |
Досліждуемий пристрій |
||
Мінімум |
Норма |
Максимум |
|
Діапазон діючих значень комутуючої змінної напруги, В |
12 |
220 |
220 |
Дозвіл (кількість градацій) діючого значення навантаження на напругу |
|
100 |
|
Допустимий робочий діапазон температур навколишнього середовища, °С |
-40 |
|
+85 |
Відносна вологість |
не більше 60% при температурі +35°С |
||
Розміри, мм |
58х62х25 |
||
Вага, г |
700 |
||
1.2 Класифікація і порівняльна характеристика з аналогами
Регулятори потужності бувають:
а) діммер — регулювальник електричної потужності навантаження, що як правило включається послідовно з навантаженням. Зазвичай використовується для регулювання яскравості свічення ламп розжарювання або галогенних ламп;
б)регулювальник тиристора потужності — електронна схема що дозволяє змінювати потужність, що підводиться до навантаження, шляхом затримки включення тиристора на напівперіоді змінного струму. Простий регулятор, що не створює шуму. Цей триністорний регулятор відноситься до пристроїв, в яких комутація триристорів відбувається в моменти переходу мережевої напруги через «нуль», а потужність регулюється зміною числа напівперіодів напруги, що підводиться до навантаження.
У всіх галузях промисловості, де необхідно керувати великими активними і індуктивними навантаженнями, використовуються тиристорні регулятори потужності, наприклад в промислових печах, при переробці пластмас, на транспорті і т.д.
Складається тиристорний регулятор з ізольованого радіатора, двох зустрічно-паралельно включених силових тиристорів в кожній фазі, сервісної електроніки керування. Гальванічна окремо від силової схеми мікропроцесорне управління. Тиристорні регулятори містять спеціальні алгоритми для карбідних, кремнієвих і суперканталових нагрівальних елементів і обмежувач струму. Тиристорні регулятори мають до п'яти різних входів управління на вибір замовника, зворотний зв'язок по потужності, струму або напрузі в навантаженні, виходи для сповіщень і ретрансміссіі сигналу. За перевантаженнями стежить вбудований електронний обмежувач струму;
в) симісторний регулювальник потужності.Застосування симіторів у регуляторах потужності та в різноманітних автоматичних комутаторах ускладнене із-за необхідності забезпечення порівняно великого струму управляючого електроду - 150 мА для симісторів серії КУ 208. Управління симістором постійним струмом вимагає великої потужності, а при імпульсному управлінні необхідний формувач, що забезпечує короткі імпульси в момент проходження мережевої напруги через «нуль» і загальний вивід, спільний з одним з мережевих провідників;
г) електронний регулювальник ходу — пристрій для управління зворотами електродвигуна;
д) регулювальник потужності дуги електрогідравлічний – система автоматичного регулювання горіння дуги, що забезпечує підтримку заданого значення активної потужності, що вводиться в піч.
У сучасних мікропроцесорних регуляторах, наприклад, регуляторах виробництва підприємства МІКРОЛ, можуть існувати різні функціональні і сервісні можливості:
вибір напряму дії регулятора;
установка різних видів і значень гістерезису ;
масштабування шкал вимірюваних параметрів в технологічних одиницях;
підвищення точності вимірювання за рахунок використання цифрового методу лінеаризації;
можливість використання декількох регуляторів з різними заданими точками по одному параметру;
можливість створення програмних регуляторів, що передбачають нагріваючи, витримку і охолодження із заданою швидкістю, перехід від однієї заданої точки на іншу за часом (по таймеру) або іншому параметру;
можливість використання імпульсних (динамічних) вихідних сигналів (типу «пуск-стоп») по двохпозиційній логіці управління – для управління електродвигунами насосів, приводів і ін.;
можливість використання безпечного управління.
Можливість програмування даних режимів і використання різних параметрів дозволяє створити велику кількість різноманітних двохпозиційних систем регулювання.
Крім того, мікропроцесорні регулятори володіють додатковими сервісними функціями:
наявність інтерфейсного каналу зв’язку (з комп’ютером і з іншими контролерами) надає можливість контролю або зміни конфігурації параметрів регулятора;
об’єднання регуляторів в розподілені контрольно-вимірювальні системи;
реєстрація і архівація параметрів на компютері.
Слід зазначити, що двохпозиційні регулятори часто використовують для допоміжних потреб, а не для безпосереднього регулювання. Наприклад:
якщо об’єктом управляє регулятор (з аналоговим або імпульсним виходом), двохпозиційний регулятор може включати додатковий контур нагріву або охолоджування для прискорення виходу процесу на режим;
двохпозиційний регулятор може забороняти вентиляцію при дуже низькій температурі на вулиці або відсутності центрального опалювання.
Недоліки двохпозиційних регуляторів: двохпозиційні регулятори практично непридатні для систем з істотним транспортним запізнюванням і для об’єктів без самовирівнювання, оскільки регульована величина далеко виходить за необхідні межі регулювання. На креслені К КрНУ. ДП. 06.01.001. Е3. Опис роботи електрино принципової схеми.
У регуляторі застосований здвоєний компаратор U2 типу LM393. Перша половинка компаратора використовується для прив’язки до мережевої напруги. Через особливості LM393 в схему прив’язки довелося додати резистор R27, який спільно з R14, R15 утворює дільник напруги, що зменшує негативний напруга на входах компаратора. Меандр мережевої частоти з виходу компаратора надходить на вхід мікроконтролера INT0. Друга половинка компаратора використовується в петлі зворотного зв’язку. Однобітний сигнал помилки надходить на вхід мікроконтролера T1. На входах компаратора встановлені ФНЧ, утворені елементами R16, C7 і R17, C8. Сигнал з виходу модулятора (висновок T0 мікроконтролера) надходить на вхід ФНЧ через дільник R18, R19. Дільник необхідний з тієї причини, що компаратор не може працювати з вхідними напругами, близькими до напруги харчування. Після дільника імпульси мають амплітуду близько 3,5 В. Стабільність амплітуди визначається стабільністю напруги живлення +5 В, яке використано в якості опорного. Напруга, що знімається з навантаження, надходить на вхід іншого ФНЧ також через дільник, утворений резисторами R20, R21. Цей дільник вибирається таким чином, щоб при номінальному напрузі мережі і потужності в навантаженні 100% напруга на виході ФНЧ становило 3,5 В. Сигнал з виходу микроконтроллера INT1 через транзисторний ключ надходить на управління тиристорами. Оптотиристор V1 і V2 разом з діодним складанням VD11 утворюють керований випрямляч, який і живить навантаження. Кнопки управління для економії портів мікроконтролера включені по-іншому. У циклі роботи регулятора є проміжок, коли індикатори погашені. У цей час стало можливим провести сканування кнопок, використовуючи лінії даних індикаторів. Таким чином, три кнопки використовують додатково тільки одну лінію: це лінія повернення P3.7. Третя кнопка знадобилася для управління режимом «AUTO». Відразу після включення регулятор знаходиться в ручному режимі, тобто функціонально відповідає регулятору, описаного вище. Для включення режиму автоматичного регулювання необхідно натиснути одночасно кнопки «AUTO» і «UP». При цьому запалюється світлодіод «AUTO». У такому режимі регулятор автоматично підтримує встановлену потужність. Якщо тепер натиснути і утримувати кнопку «AUTO», то на індикаторах можна подивитися поточний стан регулятора (відсотки вихідний потужності, які змінюються при коливаннях напруги так, щоб потужність залишалася незмінною). Якщо мережеве напруга впала настільки, що підтримувати потужність немає можливості, то починає блимати світлодіод «AUTO». Вимкнути режим автоматичного регулювання можна одночасним натисканням кнопок «AUTO» і «DOWN». При струмі навантаження більше 2 А оптотиристор необхідно встановити на тепловідвід. Підстави оптотиристор з’єднані з анодами, тому в даній схемі прилади можна монтувати на загальному радіаторі, який з’єднаний із загальним проводом пристрою. Як VD11 бажано застосувати збірку діодів Шоттки (або два окремі діода Шоттки, наприклад КД2998). В крайньому випадку, можна застосувати звичайні діоди, що допускають необхідний струм навантаження. Хороші результати можна отримати з КД2997, КД2999, КД213. Компаратор LM393 випускає ПО «Інтеграл» під позначенням IL393. Можна застосувати і два окремих компаратора, наприклад LM311 (він же КР554СА3). Замість транзистора КП505А (виробництва з-да «Транзистор», м. Мінськ) можна застосувати біполярний транзистор КТ815, КТ817, додавши резистор 1 кОм послідовно в ланцюг колектора VT3. До решти деталей вимоги такі ж, що і для регулятора, описаного вище. Для настройки регулятора необхідно до нього підключити навантаження і подати номінальне мережеве напруга (наприклад, за допомогою ЛАТР). Потім потрібно встановити максимальну потужність (100%). Підлаштування резистором R21 необхідно домогтися різниці напруг на входах 5 і 6 компаратора U2B, близької до нуля. Після цього потрібно зменшити потужність до 90% і включити режим «AUTO». Підстроюванням R21 необхідно домогтися збігу (з точністю ± 1 одиниця) встановленої потужності і свідчень індикаторів у режимі контролю стану регулятора (при кнопці «AUTO»).
На креслені К КрНУ. ДП. 06.01.002. Е3. Опис роботи електрино принципової схеми.
Імпульси напруги, що надходять по ланцюгу VD2, R3, VD3 і через внутрішній захисний діод польового транзистора VT1, заряджають конденсатор С1. Напруга на цьому конденсаторі, обмежена до 10 - 11 В стабілітрон VD1, живить мікросхеми. З пульсуючої напруги на резисторі R4 тригер Шмітта, виконаний на елементах DD3.1 і DD3.2 формує імпульси з частотою 50 Гц і крутими перепадами. Ці імпульси подані на рахункові входи лічильників DD4 і DD5. Перший (DD4) формує вимірювальний інтервал тривалістю 0,2 с (десять періодів мережевої напруги), по закінченні якого диференціюється ланцюг R9, С3 формується імпульс паралельного завантаження двійкового коду, сформованого лічильником DD2, в лічильник DD5. Сигнал з виходу переносу (виведення 7) лічильника DD5 управляє комутуючим навантаженням польовими транзисторами VT1 іVТ2.
Лічильник DD5 працює на віднімання. Після завантаження в нього будь-якого, крім 0000, двійкового коду на виході перенесення буде встановлений високий рівень. В результаті транзистори VT1 і VT2 відкриються, на навантаження надійде мережева напруга. Транзистори включені зустрічно-послідовно для комутації змінної напруги. Їх відкриття завжди відбувається в момент переходу мережевої напруги через нуль, що забезпечує низький рівень перешкод. Діоди VD5 і VD6 обмежують викиди напруги на затворах транзисторів.
Припустимо, в лічильник DD5 завантажений двійковий код 0101, відповідний десятковому числу 5. Після впливу на рахунковий вхід п'яти імпульсів, наступних з частотою мережі, рівень на виході перенесення стане низьким і заблокує подальше проходження рахункових імпульсів через елемент DD3.3. Транзистори VT1 і VТ2 при такому рівні на затворах будуть закриті. Цей стан збережеться до наступного імпульсу паралельного завантаження. Після нього описаний цикл, в якому з кожних десяти періодів мережевої напруги в навантаження надходять тільки п'ять, повториться. Це число можна змінювати від 0 до 9 установкою відповідного коду на входах паралельного завантаження лічильника DD5, регулюючи, таким чином, потужність, що надходить в навантаження, від 0 до 90% максимальної ступенями по 10%. Код для завантаження в лічильник DD5 формує на своїх виходах лічильник DD2. Перетворювач коду DD6 і індикатор НG1 служать для відображення коду. Цифра на індикаторі відповідає відносному рівню потужності в десятках відсотків. Імпульси, що змінюють стан лічильника DD2, виробляє генератор на елементі (тригері Шмітта) DD1.4. Напрямок рахунку визначає RS-тригер з елементів DD1.2 і DD1.3. Якщо на виводі 10 лічильника DD2 високий рівень, рахунок піде в бік збільшення накопиченого числа, в іншому випадку - в бік його зменшення.
Коли жодна з кнопок SВ1, SВ2 не натиснута, на виході елемента DD1.1 встановлено низький рівень. Відкритий діодVD4 перешкоджає зарядці конденсатора С2 до порога перемикання елемента DD1.4. Генератор не працює, стан лічильника DD2 не змінюється.
Натискання на кнопку SВ2 "+" переводить RS-тригер в стан з високим рівнем на виході елемента DD1.3 і на вході керування напрямком рахунку лічильника DD2. Одночасно низький рівень на вході (висновок 1) елемента DD1.1 робить рівень на його виході високим, що призводить до закривання діода VD4 і дозволяє роботу генератора імпульсів. Кожен з них збільшує число в лічильнику на одиницю.
Якщо натиснути на кнопку SВ1 "-", RS-тригер перейде в протилежний стан, інші процеси підуть аналогічно, але число в лічильнику буде зменшуватися. При одночасному натисканні на дві кнопки рахунок піде на збільшення, так як кнопка SВ2 в цій ситуації має пріоритет. Так як вихід перенесення лічильника DD2 з'єднаний з виводом 6 елемента DD1.4, при коді 0000 під час роботи на віднімання або коді 1001 під час роботи на складання низький рівень, встановлений в цьому ланцюзі, блокує генератор, запобігаючи переповнення лічильника і подальший рахунок в тому ж напрямку. У пристрій можна ввести кнопку оперативного відключення навантаження. При натисканні на неї повинен бути поданий високий рівень на вхід 3 (висновок 1) лічильника DD2. Якщо відповідним підключенням до загального проводу і ланцюги харчування входів D1-D8 цього лічильника задати певний код, натискання на згадану кнопку встановить його на виходах лічильника, переводячи регулятор в режим із заданим рівнем потужності навантаження. Якщо вхід R (висновок 15) лічильника DD4 з'єднати не з виводом 12, а з висновком 11 (виходом 9), потужність можна буде регулювати дев'ятьма кроками по 11,1% в інтервалі 0 ... 100%.
В таблиці 1.2 представлена порівняльна характеристика регулятора потужності з аналогами.
Таблиця 1.2 – Порівняльна характеристика регулятора потужності з аналогами
Параметр |
Досліджувальний пристрій |
Аналог 1 |
Аналог 2 |
Діапазон діючих значень комутуючої змінної напруги, В |
12-220 |
220 |
220 |
Дозвіл (кількість градацій) діючого значення навантаження на напругу |
100 |
100 |
50 |
Допустимий робочий діапазон температур навколишнього середовища, °С |
-40-+85 |
-30-+60 |
-30-+75 |
Відносна вологість |
не більше 60% при температурі +35°С |
||
Розміри, мм |
58х62х25 |
60х70х30 |
30х85х34 |
Вага, г |
700 |
760 |
840 |
1.3 Розробка структурної, електрично принципової схеми, опис роботи
Структурна схема регулятора потужності на мікроконтролері представлена на кресленні К КрНУ ДП 04.01.000 Е1.
Напруга від блоку живлення надходить на такі блоки як: блок мікроконтролера, блок індикації, блок перевірки, блок кнопок та блок регулятора потужності.
У блоці кнопок знаходься перемичка на два режими:
постійний трум 220 В;
змінний струм 12-220 В.
Інформація про обраний режим у блоці кнопок надходить до блоку мікро контролера звідти на блок перевірки, та повертаеться назад на блок мікроконтролера. З блок мікроконтролера інформація йде на блок регулятора потужності потім на блок індикації, та виводить на екран.
Схема електрично принципова представлена на креслені К КрНУ. ДП. 06.01.000. Е3. Опис роботи схеми в наступному.
Основою регулятора потужності (див. рис. 2) є мікроконтроллер DD1 типу AT89C2051 фірми ATMEL. Для живлення схеми регулятора використаний малопотужний трансформатор T1, що разом із застосуванням оптотиристор забезпечує гальванічну розв’язку від мережі. Це робить пристрій більш електробезпечним. Ще однією корисною властивістю регулятора є те, що він може бути використаний з навантаженнями, розрахованими на різний робочу напругу. Для цього достатньо подати на вхід тиристорів необхідну напругу з додаткового трансформатора. Наприклад, регулятор можна використовувати для живлення низьковольтного паяльника. Необхідно лише, щоб напруга і струм не перевищували максимально допустимих для застосованих тиристорів. Регулювання потужності в навантаженні здійснюється за допомогою кнопок SB1 і SB2. Коротке натискання однієї з кнопок викликає зміна потужності на один крок. При утриманні кнопки відбувається монотонне зміна потужності. Одночасне натискання двох кнопок вимикає навантаження, якщо до цього вона була включена або включає максимальну потужність, якщо навантаження було вимкнено. Для індикації потужності в навантаженні служать світлодіодні семисегментний індикатори HG1 — HG3. Для зменшення кількості елементів використана динамічна індикація, яка реалізована програмно. Вбудований в мікроконтроллер аналоговий компаратор здійснює прив’язку до мережевої напруги. На його входи через обмежувачі R17, R18, VD1, VD2 поступає змінна напруга з вторинної обмотки трансформатора живлення. Роль обмежувача для негативної полярності виконують діоди випрямного моста. Компаратор відновлює знак мережевої напруги. Перемикання компаратора відбуваються в моменти переходу мережевої напруги через нуль. Вихід компаратора опитується програмно, і як тільки виявляється зміна його стану, на вихід управління тиристорами (порт мікроконтролера INT0) видається керуючий рівень для включення тиристорів. Якщо поточний напівперіод підлягає пропуску, то керуючий рівень не видається. Потім на 4 мс включається індикатор HG3. У цей час відбувається перевірка натискання кнопок і, якщо потрібно, змінюється значення поточної потужності. Потім знімається керуюча напруга з тиристорів, і на 4 мс включаються індикатори HG1 і HG2. Після цього протягом 4 мс очікується нова зміна стану компаратора. Якщо зміни не відбувається, система все одно починає цикл, не прив’язавшись до мережі. Тільки в цьому випадку тиристори не відкриваються. Це зроблено для того, щоб індикація нормально працювала навіть без імпульсів прив’язки до частоти мережі. Такий алгоритм роботи, однак, накладає деякі обмеження на мережеву частоту: вона повинна мати відхилення від 50 Гц не більше 20%. На практиці відхилення частоти мережі значно менше. Сигнал з порту INT0 надходить на ключ, виконаний на транзисторах VT3 і VT4, який служить для управління світлодіодами оптотиристор. Коли активний сигнал RESET мікроконтролера, на порту присутній рівень логічної одиниці. Тому в якості активного рівня обраний нуль. Для комутації навантаження використовуються два оптотиристор, включені зустрічно-паралельно. Світлодіоди оптотиристор з’єднані послідовно. Ток світлодіодів задається резистором R16 і дорівнює приблизно 100 мА. Регулятор може працювати в двох режимах з різним кроком регулювання потужності. Вибір режиму роботи здійснюється перемичкою JP1. Стан цієї перемички опитується відразу після скидання мікроконтролера. У режимі 1 крок регулювання потужності становить 1%. При цьому на індикаторі відображаються цифри від 0 (0%) до 100 (100%). У режимі 2 крок регулювання потужності становить 10%. При цьому на індикаторі відображаються цифри від 0 (0%) до 10 (100%). Вибір числа градацій 10 в режимі 2 обумовлений тим, що в деяких випадках (наприклад, управління електроплитою) не вимагається малий крок регулювання потужності. Якщо регулятор передбачається використовувати тільки в режимі 2, то індикатор HG1 і резистори R8, R9 можна не встановлювати. Взагалі кажучи, регулятор дозволяє довільно задати число градацій потужності для кожного з режимів. Для цього необхідно в код програми за адресою 0005H занести бажане значення градацій для режиму 1, а за адресою 000BH — для режиму 2. Потрібно тільки пам’ятати, що максимальна кількість градацій в режимі 1 повинно бути не більше 127, а в режимі 2 — не більше 99, оскільки в цьому режимі індикація сотень неможлива. При струмі навантаження до 2 А оптотиристор можна використовувати без радіаторів. При більшому струмі навантаження оптотиристор необхідно встановити на тепловідвід площею 50 — 80 см 2 . При використанні регулятора з напругою менше 50 В оптотиристор можуть бути будь-якого класу по напрузі. При роботі з мережевим напругою клас оптотиристор повинен бути не нижче 6. Як трансформатора живлення можна застосувати будь-який малопотужний трансформатор з напругою вторинної обмотки 8 — 10 В (змінна) і допустимим струмом навантаження не менше 200 мА
1.4 Обгрунтування бази, яка використовується в пристрої
Одно кришталевій 8-розрядній мікроконтролер АТ89С2051 фірми АТМЕL з Flash ПЗУ.
Живлення МК-подають на виводи 20 VCC та 10 GNG:
позитивна напруга подаеться на вивід з макси мальним порядковим числом, а спільний дріт- на вивід з вдвоє меншим номером. Допустимий розкид напруги живлення 2,7-6В для максимальних частот 0-12мГц і 4-6В для тактових частот 12-24мГц. Максимальна напруга VCC, яке не призводить до виходу МК зі строю, складає 6,6В.
Тактовій генератор. Всередині МК знаходяться осциляторний вузол. До його складу входить підсилювач інвертор, який здійснює зсув фаз на 180(рисунок 1.1)

Рисунок 1.1 – Пісидювач інвектор
Між входом XT1 і виходом XT2 допускаеться вмикати керамічний, або кварцовій резонатори, приклад(риснок 1.2):

Рисунок 1.2 – Керамічний, або кварцовий резонатори
Кварцовий резонатор ZQ в даній схемі еквівалентний високодобротній індуктивності, створюючий разом з С1, С2 паралельний коливальний контур.Це дає можливості викликати умови для автогенерації. Це тільки два приклади підключення АТ89С2051.
Конфігурація виводів згідно справочним даним приведена на рисунку 1.3
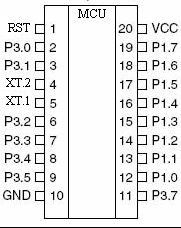
Рисунок 1.3 - Конфігурація виводів згідно справочним даним
У таблиці 1.3 представлені основні параметри мікроконтролера АТ89С2051.
Таблиця 1.3 - Основні параметри мікроконтролера АТ89С2051
Параметр |
Значення |
максимальна частота роботи Fmax, мГц |
24 |
вх/вих |
15 |
FLASH ПЗУ,Кб |
2 |
Корпус |
S01C-20 |
Вихід |
аналоговий |