

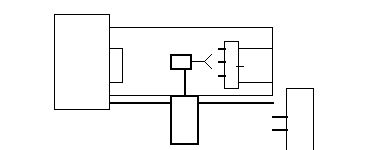
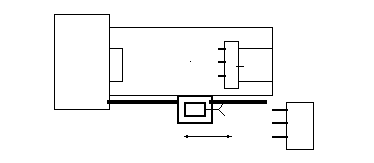
4. Компоновка участка.
Задача робота состоит в следующем:
Робот перемещаясь от пристаночного механизма с инструментами захватывает инструмент;
Затем он перемещается к револьверной головке;
Робот наклоняется револьверной головке и вставляет в неё инструмент
После чего робот поворачивается и занимает исходное положение.
Далее производится обработка детали. Позиция обработки находится непосредственно в станке.
Компоновка участка:
5. Анализ динамики исследуемого объекта.
Анализ динамики ПР по известным зависимостям обобщенных координат от времени решается при допущении, что:
Все звенья манипулятора считаются абсолютно жесткими;
Свойства и работа приводов не учитываются;
Не учитываются люфты и пары трения.
Данный анализ производится с целью определения нагрузок на двигатель, для его выбора по нагрузочным статическим и динамическим характеристикам. Двигатель выбирается с некоторым запасом, чтобы не учтенные факторы не сказались критично. В данной работе решается обратная задача моделирования динамики робота. Она заключается в следующем.
Известно по какой траектории движется рабочий орган робота. Требуется определить усилие в приводах.
В данной работе будем рассматривать только две степени свободы, с углом поворота и перемещениемS
где – угол наклона робота
Исходные данные ПР :
-
Наименование
Данные
Длина руки
Масса оператора
Масса инструмента
Закон изменения угла поворота

Запишем выражения для определения усилий на приводах.
Для первого привода.

Для второго привода.
![]()
Подставляя значения в заданные выражения, получаем следующие данные.
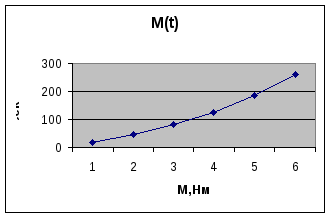
Для первого привода.
|
T, сек |
M(t), Н*м |
|
1 |
18,53613 |
|
2 |
45,09776 |
|
3 |
79,49803 |
|
4 |
125,2303 |
|
5 |
186,1518 |
|
6 |
262,8215 |
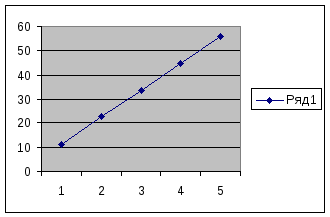
Для второго привода
|
T, сек |
Q(t), Н |
|
1 |
11,2 |
|
2 |
22,4 |
|
3 |
33,6 |
|
4 |
44,8 |
|
5 |
56 |
 Блок
– схема.
Блок
– схема.



























 ДА
ДА



 НЕТ
НЕТ


7. Сеть Петри.




























 k1
k2
k2
k3
k4
k5
k6
k1
k2
k2
k3
k4
k5
k6



















k11 k10 k9 k8k7
где,
А1– Робот в исходном положении;
А2– перемещение к РГ;
А3– поворот на заданный угол;
А4– захват инструмента;
А5– отвод манипулятора;
А6– перемещение к ИМ;
А7 – установка инструмента в ИМ;
А8– захват следующего инструмента;
А9– перемещение к РГ;
А10– поворот на заданный угол;
А11 – установка инструмента в РГ;
А12– отвод манипулятора;
8. Циклограмма.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
|
|
ПР перемещается к РГ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
ПР наклоняется к РГ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
Захват инструмента
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
ПР выпрямляется
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |||||||||||||||
|
|
Перемещается к ИМ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
Вставляет инструмент в ИМ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
Захват другого инструмента
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
Перемещение к РГ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
Вставляет инструмент в РГ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
ПР становится в исходное положение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||
|
|
Обработка по программе |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| ||||||||||||||





















Выводы
В ходе выполнения данной курсовой работы был проведен расчет динамики (обратная задача) процесса смены инструмента на обрабатывающем центре типа ИР – 500 и обоснована производственная и экономическая необходимость внедрения автоматизированных технологий.
Был проведен расчет усилий возникающих при повороте оператора и перемещении (выдвижении или втягивании) руки манипулятора. Также была построена циклограмма работы робота и станка.