

Расчет сар на заданную степень затухания.
Показатели качества переходного процесса.

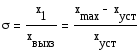
ст – статическая ошибка
tp – время регулирования
3. х1 – максимальная динамическая ошибка
 перерегулирование
перерегулирование
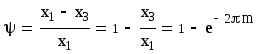
5. степень затухания
Метод расширенных АФХ.
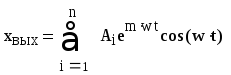
Решение однородного линейного дифференциального уравнения имеет вид:
 если среди корней
есть pi=-αjw
если среди корней
есть pi=-αjw
 pi=-mwjw
pi=-mwjw
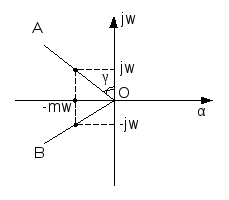
![]()
Характеристика системы, когда вместо оператора р подставляется p=-mwjw, обозначается W(m,jw) и называется расширенной АФХ системы.
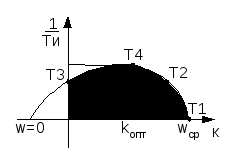
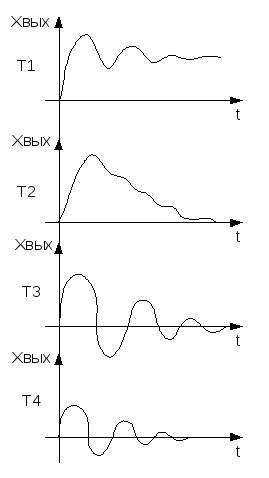
Совокупность параметров настройки регулятора, обеспечивая расположение корней характеристического уравнения на контуре АОВ образует в плоскости параметров настройки регулятора внутри области устойчивости так называемую линию равной степени затухания.
Характеристическое уравнение системы обычно имеет вид:
![]()
Запишем РАФХ:
![]()
В показательной форме:
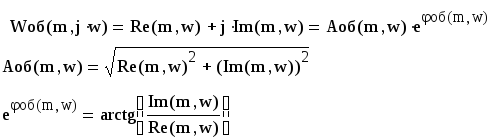
![]()
Отсюда видно:
Методика расчета параметров настройки регулятора по методу РАФХ:
задаемся степенью затухания: ψ→m
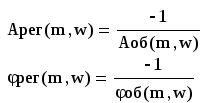
записываем выражение для РАФХ объекта в показательной форме
записываем выражение для РАФХ регулятора в показательной форме
Приравниваем амплитуды и фазы объекта и регулятора:

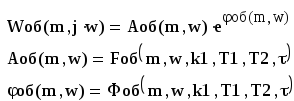
Решение системы уравнений относительно двух параметров относительно Ти и К представляем в виде:
Подставляем численные значения k1, T1, T2, τ, m

Для регулятора с двумя параметрами настройки, системы решения пункта 6 представляется на плоскости и называется линией равной степени затухания.
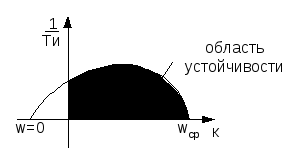
Для ПИД-регулятора, задавшись численными значениями времени предварения Тп=const, строят семейство линий равной степени затухания, которые образуют поверхность равной степени затухания.
2. Расчет оптимальных настроек в одноконтурной сар


апериодическое звено колебательный процесс
J – функционал, когда каждому виду функций соответствует число.
Задача поиска оптимальных параметров настройки можно было сформулировать следующим образом: найти k*, Ти*, Тп* при которых обеспечивается минимум функционала.
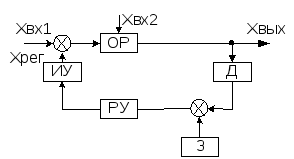
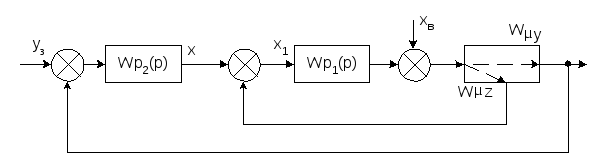
Понятие каскадной системы: расчет основного регулятора
Если среди вспомогательных параметров координат объекта, можно выделить такую, которая отзывается на возмущение быстрее, чем основной регулируемый параметр, то путем введения дополнительного контура можно построить так называемую каскадную систему регулирования.
Каскадными принято называть системы, в которых выходной сигнал одного из регулятора направляются в качестве задания на другой регулятор.
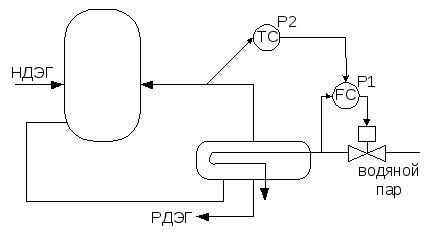
В качестве параметра, который отзывается на возмущение быстрее, чем регулируемый параметр, здесь расход.
Принцип действия каскадной системы: основные возмущения системы компенсируются быстродействующим регулятором Р1, а оставшиеся возмущения – Р2 путем изменения задания регулятору Р1. (Р1 – вспомогательный или стабилизирующий регулятор, Р2 – основной или корректирующий регулятор)
 μ
– регулирующее воздействие
μ
– регулирующее воздействие
Wμy – передаточная функция по основному каналу
Wμz – передаточная функция по вспомогательному каналу.
Расчет двухконтурной системы сводится к расчету двух одноконтурных систем.
Необходимо выполнение условий wр1>>wp2

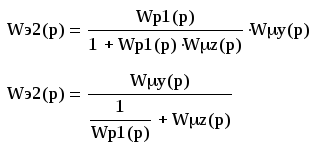
Если на рабочей
частоте wp2
выполняется условие :
![]()

Далее рассчитывают параметры настройки регулятора любым из известных методов.