

Единое информационное пространство.

Дирекция
Руководство
MES-системы
Автоматизация. SCADA-системы.
Верхний уровень – OLAP. Это система формирования отчетов. Вопрос формулируется с рядом ограничений. В результате, учет ограничений ведет к тому, что вопрос формулируется сразу в нескольких плоскостях. Отчет на такой запрос обычно представляется в виде куба ( не всегда трехмерного, обычно больше). На основании этих отчетов принимаются решения о стратегии действий. Пользователи – высший менеджмент.
Второй сверху уровень –ERP. Это корпоративная информационная система. Автоматизация учета и управления. Обычно решает следующие вопросы: ведение конструкторских и технологических документаций, формирование планов, управление запасами и закупками, финансовые функции. Пользователи: сотрудники финансово-хозяйственного управления, технологи, плановики.
Третий сверху уровень – MES. Это системы управления производством. Использует управляющую информацию с уровня планирования (ERP) и управляет деятельностью производства (SCADA). Преследует цели максимальной эффективности и минимальной стоимости выполнения процессов. Реализация MES - manufacturing execution systems. APS - advanced planning and scheduling (долгосрочное планирование и составление расписаний). EAM- enterprise asset management (управление активами предприятия). Пользователи – руководители пр-ва, служба главного механика и пр.
Нижний уровень – SCADA. Это диспетчиризация, управление и сбор данных с технологического процесса. Наиболее распространенный способ построения АСУТП. Объединяет и связывает между собой аппаратное обеспечение контроля над ТП ( датчики, контроллеры) с одной стороны и диспетчеров, следящих за этим процессом с другой. Пользователи: диспетчеры и операторы ТП.
Место и задачи MES систем в едином информационном пространстве.
Это системы управления производством. Использует управляющую информацию с уровня планирования (ERP) и управляет деятельностью производства (SCADA).
Задачи:
Контроль состояния и распределение ресурсов (Resources Allocation & Status - RAS)
Оперативное/Детальное планирование (Operation/ Detailed Scheduling - ODS)
Диспетчеризация производства (Dispachtching Production Units - DPU)
Управление документами (Document Control - DC)
Сбор и хранение данных (Data Collection/ Acquisition - DCA)
Управление персоналом (Labour Management - LM)
Управление качеством продукции (Quality Management - QM)
Управление производственными процессами (Process Management - PM)
Управление техобслуживанием и ремонтом (Maintenance Management - MM)
Отслеживание истории продукта (Product Tracking & Genealogy - PTG)
Анализ производительности (Performance Analysis - PA)
Место и задачи SCADA систем в едином информационном пространстве.
Это диспетчиртзация, управление и сбор данных с технологического процесса.
Задачи:
Обмен данными с УСО (устройства связи с объектом, то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
Обработка информации в реальном времени.
Отображение информации на экране монитора в удобной и понятной для человека форме.
Ведение базы данных реального времени с технологической информацией.
Аварийная сигнализация и управление тревожными сообщениями.
Подготовка и генерирование отчетов о ходе технологического процесса.
Осуществление сетевого взаимодействия между SCADA ПК.
Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
Критерии SCADA систем.
Критерии оценки SCADA систем, которые в первую очередь должны интересовать пользователя можно разбить на три основные группы:
Технические характеристики
Стоимостные характеристики
Эксплуатационные характеристики
Технические:
Программно-аппаратные платформы для SCADA-систем. Анализ перечня таких платформ необходим, поскольку от него зависит ответ на вопрос, возможна ли реализация той или иной SCADA-системы на имеющихся вычислительных средствах (DOS/MS, Windows, OS/2, SCO UNIX, VMS, MS Windows/NT).
Имеющиеся средства сетевой поддержки. Одной из основных черт современного мира систем автоматизации является их высокая степень интеграции. В любой из них могут быть задействованы объекты управления, исполнительные механизмы, аппаратура, регистрирующая и обрабатывающая информацию, рабочие места операторов, серверы баз данных и т.д. Очевидно, что для эффективного функционирования в этой разнородной среде SCADA-система должна обеспечивать высокий уровень сетевого сервиса.
Встроенные командные языки.
Поддерживаемые базы данных. Одной из основных задач систем диспетчерского контроля и управления является обработка информации: сбор, оперативный анализ, хранение, сжатие, пересылка и т. д. Таким образом, в рамках создаваемой системы должна функционировать база данных.
Графические возможности.
Стоимостные:
Стоимость программно-аппаратной платформы;
Стоимость системы;
Стоимость освоения системы;
Стоимость сопровождения.
Эксплуатационные:
Показатели этой группы критериев наиболее субъективны. Это тот самый случай, когда лучше один раз увидеть, чем семь раз услышать. К этой группе можно отнести:
Удобство интерфейса среды разработки - "Windows - подобный интерфейс", полнота инструментария и функций системы;
Качество документации - ее полнота, уровень русификации;
Поддержка со стороны создателей - количество инсталляций, дилерская сеть, обучение, условия обновления версий и т. д.
Состав SCADA систем.
SCADA—система обычно содержит следующие подсистемы:
Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им.
Диспетчерская система — собирает данные о процессе и отправляет команды процессу (управление)
Абонентский оконечный блок, либо УСО (RTU, англ. Remote Terminal Unit), подсоединяемый к датчикам процесса. Преобразует сигнал с датчика в цифровой код и отправляет данные в диспетчерскую систему.
Программируемый Логический Контроллер (PLC, англ. Programmable Logic Controller) используется как полевое устройство из-за экономичности, универсальности и гибкости нежели RTU специального назначения.
Коммуникационная инфраструктура для реализации промышленной сети.
1. Сторонние системы.
2. OPCDA:
Trends-основные направления, HMI-разработка экранных форм, Сервер историй, Сервер алармов-тревог.
3. Протоколы: TM120
Modbus, CAN, МЭК, Ethernet.


Функции SCADA систем.
1. Автоматизированная разработка позволяет создавать ПО системы автоматизации без реального программирования.
2. Средства сбора первичной информации от устройств нижнего уровня.
3. Средство управления и регистрации сигналов об аварийных ситуациях.
4. Средство хранения информации и возможность дальнейшей ее обработки
5. Средство обработки первичной информации.
6.Средство визуализации представления информации в виде гистограмм, графиков и проч.
7. Возможность работы прикладной системы с набором параметров рассматриваемых как единое целое.
Технические характеристики SCADA систем.
сферы применения;
типы подключаемого оборудования;
операционные системы и требования к аппаратному обеспечению;
временные характеристики системы;
зыки программирования, используемые для описания ТП;
структура системы;
возможность работы в режиме реального времени;
графические возможности системы;
ценовые характеристики;
ограничения системы;
примеры внедрения системы.
Модульный состав SCADA систем на примере Infinity Suite.


1. Сторонние системы.
2. OPCDA:
Trends-графическое представление технологических параметров.
HMI-разработка экранных форм
Сервер историй
Сервер алармов-тревог
3. Протоколы: TM120
Modbus
CAN
МЭК
Ethernet.
Структура
-Централизованная система безопасности и аудита
-Единая система администрирования
-Диагностика, резервирование оборудования и программных компонентов.
-Объединенное конфигурирование и проектирование технологических систем.
-Открытость и масштабируемость.
Функции:
сбор данных от подчиненных устройств (контроллеров) и передача управляющих воздействий подчиненным устройствам;
пересчет значений, получаемых с контроллеров, из физических единиц измерения в инженерные;
предоставление доступа ко всей оперативной информации по интерфейсу ОРС DA;
обмен данными со сторонними ОРС серверами;
отслеживание достоверности технологических сигналов;
логическая обработка технологических сигналов;
генерация сообщений о событиях, происходящих в системе, трансляция в локальную сеть;
ведение исторического журнала событий;
сохранение истории изменения технологических сигналов;
резервирование серверов ввода/вывода с синхронизацией исторических данных;
резервирование исторической информации.
Алармы. Виды алармов.
Alarms (тревоги) и Events (события) состояние тревоги, некоторое сообщение, предупреждающее оператора о возникновении определенной ситуации.
Используются для отображения ситуаций в технологическом процессе, которые требуют немедленного внимания.
Например:
достижение предельных значений параметра;
обнаружение какого-либо события;
критические ситуации.
Аларм называется подтвержденным (квитированным) после того, как оператор отреагирует на сообщение об аларме.
Парметры:
В OPC AE в качестве параметров указываются:
источник события;
время;
тип;
категория события
важность;
сообщение;
прочее (по желанию разработчика сервера).
Приоритет алармов:
Алармы Диапазон приоритетов
Критичные 0 и 1
Существенные от 2 до 4
Предупреждающие от 5 до 7
Информационные 8 и 9
0 – критичный аларм, выдающий звуковое оповещение
до тех пор, пока он не будет квитирован.
Виды:
Дискретные алармы:
срабатывают при изменении состояния дискретной переменной.
On или True (переход из 0 в 1);
Off или False (переход из 1 в 0).
Аналоговые алармы:
базируются на анализе выхода значений переменной за указанные верхние и нижние пределы:
Hi и HiHi – верхний и выше верхнего;
Lo и LoLo – нижний и ниже нижнего;
Return to normal – возврат в норму;
Deviation Down и Deviation Up - предельное отклонение вверх и вниз;
Rate of Change – скорость изменения.
Условия для аналоговых алармов:
HiHi – значение аналогового сигнала (Value) переходит из Value < HiHi в Value ≥ HiHi;
Hi – Value переходит из Value<Hi в Value ≥ Hi;
LoLo – Value переходит из Value > LoLo в Value ≤ LoLo;
Lo – Value переходит из Value > Lo в Value ≤ Lo;
Return to normal – при предыдущем изменении Value выполнилось одно из условий (HiHi, Hi, LoLo, Lo), а при текущем изменении ни одно из этих условий не выполнилось.
Порядок проверки условий:
HiHi
Hi
LoLo
Lo
Return to normal
ОРС технология.
OPC (OLE for Process Control) – промышленный стандарт, созданный консорциумом всемирно известных производителей оборудования и программного обеспечения при участии Microsoft. Этот стандарт описывает интерфейс обмена данными между устройствами управления технологическими процессами. Главной целью было предоставить разработчикам систем диспетчеризации некоторую независимость от конкретного типа контроллеров. OPC основывается на технологии OLE/COM/DCOM компании Microsoft, Inc.
ОРС-сервер – непосредственно взаимодействует с аппаратурой ТП
ОРС-клиент – получает данные от ОРС сервера для дальнейшей обработки и передает управляющие команды ОРС-серверу.
Довольно много программ-клиентов может получать данные из различных источников и делать их доступными для драйверов независимых разработчиков. Но при этом возникают следующие проблемы:
Каждая программа диспетчеризации должна иметь драйвер для конкретного устройства АСУ (Рисунок 1).
Возникают конфликты между драйверами различных разработчиков, что приводит к тому, что какие-то режимы или параметры работы оборудования не поддерживаются всеми разработчиками ПО.
Модификации оборудования могут привести к потере функциональности драйвера.
Конфликты при обращении к устройству – различные программы диспетчеризации не могут получить доступ к одному устройству одновременно из-за использования различных драйверов.
OPC проводит четкую разграничительную линию между производителями оборудования и разработчиками драйверов. Данная технология предоставляет механизм сбора данных из различных источников и передачу этих данных любой клиентской программе вне зависимости от типа используемого оборудования. Это позволяет разработчикам сосредоточиться на производительности и оптимизации работы серверной части, которая отвечает за сбор данных.

Технология ОРС определяет 2 класса программ: ОРС сервер, непосредственно взаимодействующий с аппаратурой телемеханики, и ОРС клиент, получающий данные от ОРС сервера для дальнейшей обработки и передающей в ОРС сервер команды управления.
Преимущества:
OPC был разработан для обеспечения доступа клиентской программы к нижнему уровню технологического процесса в наиболее удобной форме. Широкое распространение технологии OPC в промышленности имеет следующие преимущества:
Независимость в применении систем диспетчеризации от используемого в конкретном проекте оборудования.
Разработчики программного обеспечения не должны постоянно модифицировать свои продукты из-за модификации оборудования или выпуска новых изделий.
Заказчик получает свободу выбора между поставщиками оборудования, а также имеет возможность интегрировать это оборудование в информационную систему предприятия, которая может охватывать всю систему производства, управления и логистики.
Архитектура:
Стандарт обмена данными OPC базируется на распространенной общепринятой схеме Клиент-Сервер. Эта архитектура позволяет подключить множество клиентов к одному серверу. И наоборот, данный стандарт позволяет использования одним клиентом различных ОРС-серверов.
Применение ОРС в промышленных системах:
Коммуникационный стандарт OPC позволяет использовать его для обмена данными в индустриальных информационных системах (Рисунок 2). В нижней части рисунка 2 (Field Management), показаны три компьютера с установленными OPC-серверами, которые поддерживают различные спецификации OPC (см. далее). Каждый компьютер может иметь OPC-сервера с различными спецификациями. Существуют сервера, которые обмениваются данными с АСУ, построенной на ПЛК (ПЛК – Программируемые Логические Контроллеры). Они разработаны на базе коммуникационного протокола (например, AS511, RK512, S-bus, Modbus, DF1 и т.д.), и "распознаются" подключенным оборудованием (например, ПЛК). Доступ к протоколам, хранящимся в базе данных, обеспечивается OPC-серверами, соответствующими спецификациям OPC Historical Data Access.
В центральной части иллюстрации (Process Management) показаны еще три компьютера. На этих компьютерах установлен OPC-клиент – программа диспетчеризации – SCADA HMI (Supervisory Control And Data Acquisition Human Machine Interface). Соединение с OPC-серверами происходит через локальную сеть (LAN), что расширяет возможности в построении топологии сбора данных при помощи OPC-серверов.
OPC-серверы опираются на коммуникационный протокол представленного оборудования (например, ПЛК). Не смотря на попытки увеличить в коммуникациях долю стандартных протоколов (Profibus, Interbus, CANBus и т.д.), сейчас трудно сказать, на основании чего лучше строить системы обмена данными: на базе специфических протоколов производителей оборудования или более стандартных протоколов полевых шин. По этой причине номенклатура OPC-серверов практически копирует номенклатуру наиболее популярных систем автоматического управления.
В дальнейшем данные могут подыматься выше уровня Process Management для использования в системах управления и планирования производством, например ERP (Enterprise Resource Planning) или MES (Manufacturing Execution Systems) на уровне Business Management. Это позволяет использовать реальные данные всеми подразделениями предприятия, которые в них нуждаются.

СвязтОРС сервера с процессором:
Первый шаг в конфигурации OPC-клиента – установить на компьютер OPC-сервер (локальный или сетевой). При установлении связи OPC-сервера к OPC-клиенту, технология COM предоставляет механизм сканирования доступных OPC-серверов на указанном компьютере. Это позволяет быстро установить соединение с OPC-сервером. Это сканирование называется OPC server browsing.
Второй шаг – это связать данные из конфигурации OPC-сервера с конфигурацией OPC-клиента. Обеспечивается это с помощью загрузки данных, которая поддерживается и OPC-сервером и OPC-клиентом. После этого необходимо связать данные из OPC-клиента с данными из OPC-сервера по адресному пространству. Если OPC-сервер или OPC-клиент не поддерживают загрузку данных/item browsing, конфигурирование OPC-клиента превращается в довольно длительную работу.
Динамическое добавление данных/Dynamic adding of items предоставляет еще более удобную методику конфигурирования OPC-клиента. С ее помощью можно создавать (или удалять) и сразу же устанавливать связь с новыми источниками данных в OPC-сервере, не останавливая ни сервер, ни клиент. В настоящее время, эта функция реализована всего в нескольких OPC серверах (клиентах), но удобство, которая она предоставляет при конфигурировании OPC-клиента, должно привести к ее широкому распространению.
OPC Common Definitions and Interfaces общие для всех OPC-спецификаций интерфейсы.
Data Access Custom Interface Standard спецификация COM-интерфейсов для обмена оперативными данными, программирование на C++.
Data Access Automation Interface Standard спецификация COM-интерфейсов для обмена оперативными данными, программирование на языках типа Visual Basic.
OPC Batch Custom Interface Specification спецификация COM-интерфейсов конфигурирования оборудования, программирование на C++.
OPC Batch Automation Interface Specification спецификация COM-интерфейсов для конфигурирования оборудования, программирование на языках типа Visual Basic.
OPC Alarms and Events Interface Specification спецификация COM-интерфейсов для обслуживания событий (event) и нештатных ситуаций (alarm), программирование на C++.
Historical Data Access Custom Interface Standard спецификация COM-интерфейсов для работы с хранилищами данными, программирование на C++.
OPC Security Custom Interface спецификация COM-интерфейсов для обработки прав доступа к данным, программирование на C++.
Спецификации ОРС технологии.
Используя спецификация ОРС производитель аппаратных средств имеет возможность разработать программу – сервер, обеспечивающую доступ к данным программ – клиентов различных производителей программного обеспечения. В свою очередь производители ПО имеют возможность получать данные от систем по стандартному интерфейсу.
Типы спецификаций:
Стандарт OPC был создан на базе спецификаций OPC. В настоящее время получили наибольшее распространение следующие спецификации:
OPC Data Access 1.0 и 2.0 – обеспечивает доступ к данным в режиме "реального времени".
OPC Alarm & Events – обеспечивает OPC-клиента информацией о специальных происшествиях и тревогах.
OPC Historical Data Access – обеспечивает доступ к протоколам и хроникам, хранящимся в базах данных.
OPC Batch – отправляет рецепты дозирования в технологический процесс и отслеживает их выполнение.
Сейчас в разработке находятся еще две специфиации:
OPC Data Access 3.0
OPC XML
Рисунок 2 демонстрирует пример связи OPC-сервера и OPC-клиента при использовании одной OPC спецификации. Однако в спецификации OPC Data Access необходимо следить за использованием версии данной спецификации: сервер OPC Data Access 1.0 может общаться только с клиентом OPC Data Access 1.0 client. Поэтому удобней, если OPC-сервер поддерживает несколько версий OPC-спецификации.
В настоящее время, OPC Foundation разрабатывает новую спецификацию – OPC XML. Ее цель – разработать гибкий и удобный интерфейс для обмена данными через OPC, используя XML (Extensible Markup Language) в приложениях Internet/Intranet. Функции XML позволяют очень легко записывать любые структуры данных и, в то же время, передавать данные в виде XML-файлов, удобных для пересылки через Internet.
Один из необходимых компонентов для работы OPC-коммуникаций – COM и его сетевая версия DCOM. DCOM – стандартный компонент для операционных систем Windows NT 4.0, Windows 2000 и Windows 98. Для работы в Windows 95 DCOM нужно установить. Все эти операционные системы позволяют передавать данные в рамках одного компьютера или через локальную сеть. В Windows CE сетевые возможности появились в версии 3.0. Сейчас стандарт OPC был разработан и для операционной системы Linux.
Телемеханика ТС, ТИ, ТУ…
Телеуправление (ТУ), Телеизмерения (ТИ), Телесигнализация (ТС), Телерегулирование (ТР) — базовые функции системы телемеханики или АСУТП. Телеуправление (ТУ) (в англоязычных источниках DO — Digital Output) обеспечивает дистанционное управление объектом контроля. Управление начинается с выдачи оператором (диспетчером) команды телеуправления с ЭВМ или пульта управления. Команды ТУ обычно двухпозиционные: ТУ Включить и ТУ Отключить. Команда ТУ передается с пункта управления (ПУ) на контролируемый пункт (КП) по каналу связи. Контроллер КП, получив команду ТУ, прове-ряет ее достоверность и выдает электрический сигнал на исполнительное устройство (например, включает пусковое реле электродвигателя). Для контроля выполнения команды контроллер КП передает на ПУ квитанцию ТУ. Применяются также более сложные алгоритмы выдачи ТУ, например, с промежуточным контролем готовности исполнительных цепей. Для защиты команд ТУ от искажений при передаче применяют специальное кодирование, например, передают команду дважды, в прямом и инверсном виде и т.п. Обычно в одном цикле управляют только одним объектом. Телесигнализация (ТC) (DI — Digital Input) используется для дистанционного контроля дискретных изменений состояния объекта, например, включен/выключен, движется/стоит, норма/авария и т.п. Для получения данных объект оснащают датчиками. В простейшем случае применяют двухпозиционные контактные переключатели, но могут исполь-зоваться и многопозиционные переключатели. Контроллер КП опрашивает состояние датчиков и при изменении состоя-ния передает информацию о событии на ПУ в короткой посылке, обычно называемой ТелеСигналом. Контроллер ПУ при получении ТС передает его для обработки в ЭВМ (и на контроллер щита) для оповещения диспетчера и отображения изменившегося состояния объекта. Телеизмерения (ТИ) (ТИТ — ТИ Текущие) (AI — Analog Input) используют для получения количественной оценки характеристик контролируемого процесса, например, температуры, напряжения, тока, давления и пр. Для измерения на объекте используют преобразователи, которые преобразуют физические параметры в нормированные электрические сигналы. Контроллер КП измеряет значения этих сигналов и по запросам ПУ или спорадически передает их на ПУ в цифровом виде. ТИ поступают на ЭВМ и щит для отображения. ЭВМ следит за уровнями измерений и предупреждает оператора о превышении заданных пороговых значений (уставок). Важным параметром телеизмерений является точность. В старых системах обычно использовались 8-разрядные аналого-цифровые преобразователи (АЦП), которые обеспечивают погрешность измерения более 0,8% для однополяр-ных сигналов и более 1,6% для двуполярных. Современные системы оснащают 10...14-разрядными АЦП, что позволяет достичь точности измерений 0,25...0,1%. Дальнейшее повышение точности ограничивается наличием наводок на измери-тельные цепи. Для ослабления наводок от промышленной силовой сети с частотой 50 Гц в контроллерах КП применяют алгоритмы цифровой фильтрации. Телерегулирование (ТР) (AО — Analog Output) обеспечивает дистанционное задание уровня воздействия на объект управления. Управление начинается с задания оператором величины воздействия, а затем выдачей команды с ЭВМ. Команда ТР передается с пункта управления (ПУ) на контролируемый пункт (КП) по каналу связи. Контроллер КП, получив команду ТР, проверяет ее достоверность и выдает сигнал заданного уровня на исполнительное устройство (например, открывает вентиль на 56%). Кроме ручной выдачи управления применяется и автоматизированная выдача. В данном случае на ЭВМ устанавливают программу с алгоритмом вычисления величины управления. Для предотвращения "удара" при выдаче телерегулирования применяют плавное изменение выходного сигнала до достижения заданного уровня. Эту задачу обычно выполняет контроллер КП.
Определение телемеханики.
Телемеханика - область науки и техники, предметом которой является разработка методов и технических средств передачи и приёма информации (сигналов) с целью управления и контроля на расстоянии.
Специфическими особенностями телемеханики являются:
удалённость объектов контроля и управления;
необходимость высокой точности передачи измеряемых величин;
недопустимость большого запаздывания сигналов;
высокая надёжность передачи команд управления;
высокая степень автоматизации процессов сбора информации.
Назначение:
Телемеханизация применяется тогда, когда необходимо объединить разобщённые или территориально рассредоточенные объекты управления в единый производственный комплекс (например, при управлении газо- и нефтепроводом, энергосистемой, ж.д. узлом), либо когда присутствие человека на объекте управления нежелательно (например, в атомной промышленности, на химических предприятиях) или невозможно (например, при управлении непилотируемой ракетой). Внедрение телемеханических систем позволяет сократить численность обслуживающего персонала, уменьшает простои оборудования, освобождает человека от работы во вредных для здоровья условиях.
Когда присутствие человека на объекте управления неэелательно или невозможно.
Область применения:
Предприятия химической, атомной, металлургической, горнодобывающей промышленности, электрические станции и подстанции, насосные и компрессорные станции (на нефте- и газопроводах, в системах ирригации, тепло- и водоснабжения), ж.д. узлы и аэропорты, усилительные и ретрансляционные установки на линиях связи, системы охранной сигнализации и т. д.
Тенденции развития:
В современной системе телемеханики большое внимание уделяется программному обеспечению системы и интеграции с действующими системами и программными комплексами. Стандартом стало графическое представление схем контролируемого процесса (мнемосхем) с "живым" отображением текущего состояния, управление объектом с кадров мнемосхем.
В программном обеспечении наблюдается тенденция к стандартизации программных интерфейсов систем сбора данных и обрабатывающих программ (технология OPC), возрастает потребность экспорта собранных данных в специализированные программы (расчета режимов, планирования, аналитические, АРМ специалистов). В условиях усложнения систем повышается роль средств диагностики и отладки.
С технической стороны в системах всё чаще используются современные скоростные каналы связи (оптоволокно, езернет) и беспроводные технологии (например, транкинговая и сотовая связь). Вместе с тем сохраняется потребность стыковки с морально (а иногда и физически) устаревшими "унаследованными" системами, с сохранением их протоколов связи. На контролируемых объектах всё чаще возникает необходимость стыковки с локальными технологическими системами.
Наряду с усложнением самих систем и их программного обеспечения наблюдается изменение требований к реализуемым функциям. К традиционным функциям телемеханики (телесигнализация, телеизмерение, телеуправление) добавляются функции энергоучета, транспорта данных с локальных автоматических приборов. К обычным функциям контроля за изменением состояния и превышения предельных значений добавляются возможности текущих расчетов и логического анализа (например, балансные расчеты).
АСУТП и диспетчерское управление.
Непрерывную во времени картину развития АСУТП можно разделить на 3 этапа:
Внедрение систем автоматического регулирования (САР). Объектами управления на этих этапах являются различные параметры, установки, агрегаты, решение задач стабилизации программного управления слежения. У человека функция настройки параметров, расчета задания.
Автоматизация технологических процессов. Объектом управления становится рассредоточенная в пространстве система. С помощью САУ реализуются все наиболее сложные задачи управления. Решаются задачи оптимального и адаптивного управления. Проводится идентификация объекта и состояния системы. Характерные особенности – это внедрение систем телемеханики в управление ТП. Человека все более удаляется от объекта управления. Между ними выстраивается целый ряд объектов, исполнительных систем, средств телемеханики, измерительных механизмов.
Автоматизированные системы управления ТП характеризуются развитием человеко-машинных систем управления, методов и моделей исследования операций, диспетчированием управления на основе использования автоматизированных систем сбора данных.
Классическая схема телемеханики. Классификация 2-хуровневой системы.

Верхний уровень: ПУ, МЩ
Нижний: КП, ТУ, ТИ, ТС.
Контроль и управление системой осуществляется с пульта, где есть диспетчер, аппаратура ТМ(ЭВМ) МЩ мнемонический щит-отражает состояние объекта. Объекты контроля находятся на контролируемом пункте КП одном или нескольких.
Взаимодействие м\у ПУ и КП происходит по налаженной связи(оптика, телефония)
При подключении ПУ к КП и КС должны иметь уникальный номер.
Данные м\у ПУ и КП передаются короткими массивами-кадрами, фреймами, посылками.
Посылки содержат адресную часть, собственно данные и проверочный код.
Аппаратура: контроллер-собирает инфу об объекте датчиками и преобразователями. Датчики вкл\выкл(2 позиции обычно)
Контроллер следит за параметрами и при изменении одного из них сигнализирует на пульт управления диспетчеру-мигает и пищит лампа.
Чтобы количественно отразить изменение сигнала применяют преобразователи которые преобразуют физические параметры в нормированные электрические сигналы.
Если диспетчер хочет вмешаться, то он передает в систему сигналы телеуправления
Сигнал поступает на контроллер определенного КП, где он его проверяет достоверность, запускает исполнительный механизм и и отправляет квитанцию о выполнении действия.
Задачи ПУ:
Прием данных с КП по КС
Организация опроса КП при использовании 1го канала связи при подключении к нескольким КП
Передача на КП команд управления
Передача данных и прием команд
Переадресация передачи данных на верхний уровень и прием команд с верхнего уровня
Фильтрация, преобразование и передача данных при интеграции с системами других производителей.
Контроллер пункта и контроллер контрольного пункта
КП в телемеханике и АСУТП
КП - место размещения объектов контроля и управления, а так же аппаратуры, выполняющей функции Контроля и Управления, обычно называют контроллеры КП. КП обычно 1 контроллер установленный на объекте.
Функции кп:
Опрос датчиков и преобразователей
Передает их на ПУ, реализуя функции ТУ и ТС,
Выполнение команд ТУ.
Автоматизированные системы управления ТП. Компоненты систем контроля и управления и их назначение.
Нижний уровень – уровень объекта, контроллеры и т.д.
Различные датчики для сбора информации о ТП, электроприводы, механизмы. Датчики поставляют информацию локальным логически интеллектуальным контроллерам.
Функции ЛЛИК:
Сбор и обр-ка инфы о параметрах ТП
Управление приводами и др. исп. Механизмами.
Решение задач логического автоматического управления и др.
Для критический с точки зрения объектов рекомендуется использовать контроллеры реального времени.
Информация с ЛЛИК направляется в сеть диспетчерского пункта непрерывно или через контроллеры верхнего уровня. В зависимости от поставленной задачи КВУ(концентраторы, интеллект. Комм. Контроллеры) реализует различные функции:
Сбор данных с локальных контроллеров
Обработка данных включая масштабирование.
Поддержание единого времени в системе
Синхронизация работы подсистем
Организация архивов по выбранным параметрам
Обмен инфой м\у локальным контроллером и верхним уровнем
Работа в автономном режиме при нарушении связи с ВУ
Резервирование КС
КМУ обычно объеденены в промышленную сеть
Верхний уровень:
Диспетчерский пульт включает 1 или 2 станции управления(АРМ оператора или диспетчера), сервер БД и рабочие места специалистов.
Станции управления отображают ход ТП и оперативное управление
АРМ оператора. Станция управления Micro SCADA
SCADA - это уровень промышленного сервера и сети автоматизированных рабочих мест (АРМ) операторов, диспетчеров, установленных в различных помещениях и зданиях. АРМ реализованы на базе комплексов диспетчерского управления и сбора данных (SCADA системы). Автоматизированные рабочие места (АРМ) верхнего уровня АСУТП образуют единый информационно-вычислительный комплекс (ИВК). АРМы выделяются как полностью дублирующие (равноправные по получаемым данным и по функциям управления) друг друга рабочие места (АРМ оператора-технолога), так и как технологически ориентированные рабочие места, адекватно учитывающие специфику работы персонала и технологии участка производства(АРМ-геолога, АРМ-гл.инженера, АРМ-энергетика и т.д.).
На этом уровне осуществляется наблюдение за технологическим процессом. Технологический процесс на экране монитора представляется в виде мнемосхемы, при этом параметры технологического процесса могут отображаться в реальном масштабе времени как в цифровом виде, так и посредством анимированных изображений, изменяющих свой цвет, размер, положение, внешний вид – в зависимости от состояния соответствующего параметра(мнемосхемы, панели сигнализации, тренды, графики и т.п.).
Помимо функций визуализации состояния технологического процесса, системы диспетчеризации обеспечивают регистрацию и архивацию значений технологических параметров, формирование, протоколирование и выдачу сигналов тревог (визуальных, звуковых), протоколирование действий персонала, расчет текущих технико-экономических показателей и формирование оптимальных регламентов работы оборудования, которые передаются для исполнения на уровень управления процессом.
С целью обеспечения независимости ПО SCADA от программных и аппаратных особенностей промышленной сети и контроллеров разработана спецификация OPC (OLE for Process Control), позволяющая независимым разработчикам программного обеспечения и аппаратных средств, создавать совместимые между собой продукты.
Micro SCADA системы реализуют базовые ф-ции, присущие SCADA верхнего уровня, но направлены на решение задач узкого направления
ОРС стандарт, применения ОРС серверов в АСУ. Программная компановка.
Возможности ОРС-серверов в АСУ-предприятии

-ОРС-сервер(потребитель снизу) тот кто создает плату сбора данных и снабжает ее не только драйвером, но и реализ. ОРС-сервер, работающий с этой платой через драйвер или напрямую. Тем самым производитель оборудования автоматизации передает свободный доступ к своей плате.
Орс-сервером можно снабдить контроллер, плату ввода\вывода лишь юы это могло поставлять или применять данные.
-ОРС-клиент(потребитель сверху
ОРС-сервер поставляет данные, клиент потребляет.
-Получение данных клиентом от сервера, 3 способа
1) синхронное чтение(посылка списка клиентом, интересующих параметров и ожидание когда сервер его выполнит
2)асинхронное чтение. Клиент посылает запрос, а сам продолжает работать. Когда сервер выполняет запрос, клиент получает уведомление(через интерфейс соответствующего COM объекта, реализованного в клиенте.
3)подписка. Клиент передает серверу список переменных, а сервер регулярно присылает инфу об изменении переменных из этого списка.
Эти списки с терминологии ОРС-группы
Каждый клиент может поддерживать много групп с разной скоростью обновления. Запись данных ничем не отличается от чтения за исключением того, что нед записи по подписке
Стандарты Драйвер
OPC Common Definitions and Interfaces общие для всех OPC-спецификаций интерфейсы.
Data Access Custom Interface Standard спецификация COM-интерфейсов для обмена оперативными данными, программирование на C++.
Data Access Automation Interface Standard спецификация COM-интерфейсов для обмена оперативными данными, программирование на языках типа Visual Basic.
OPC Batch Custom Interface Specification спецификация COM-интерфейсов конфигурирования оборудования, программирование на C++.
OPC Batch Automation Interface Specification спецификация COM-интерфейсов для конфигурирования оборудования, программирование на языках типа Visual Basic.
OPC Alarms and Events Interface Specification спецификация COM-интерфейсов для обслуживания событий (event) и нештатных ситуаций (alarm), программирование на C++.
Historical Data Access Custom Interface Standard спецификация COM-интерфейсов для работы с хранилищами данными, программирование на C++.
OPC Security Custom Interface спецификация COM-интерфейсов для обработки прав доступа к данным, программирование на C++.
Формы получения данных от ОРС клиентов СОМ объект.
Существует три основных способа получения OPC-клиентом данных от OPC-сервера: синхронное чтение, асинхронное чтение и подписка. При синхронном чтении клиент посылает серверу запрос со списком интересующих его переменных и ждёт, когда сервер его выполнит. При асинхронном чтении клиент посылает серверу запрос, а сам продолжает работать. Когда сервер выполнил запрос, клиент получает уведомление (через интерфейс соответствующего COM-объекта, реализованного в клиенте!). И, наконец, в случае подписки клиент передаёт серверу список интересующих его переменных, а сервер затем регулярно присылает клиенту информацию об изменившихся переменных из этого списка (опять же, через интерфейс соответствующего COM-объекта клиента!). Эти списки в терминологии OPC называются группами. Каждый клиент может поддерживать одновременно много групп с разной скоростью обновления.
Интеграция и ОРС. Уровни интеграции.
нижний уровень полевые шины (fieldbus) и отдельные контроллеры;
средний уровень цеховые сети;
уровень АСУ ТП уровень работы систем типа SCADA;
уровень АСУ П уровень приложений управления ресурсами предприятия.
Перечислим несколько детальнее, где может найти себе работу OPC-сервер.
OPC поверх драйвера
Если имеется оборудование, например плата АЦП, управляемая через драйвер на компьютере с Windows или другой ОС, поддерживающей COM/DCOM, то это самый главный кандидат на то, чтобы непосредственно поверх драйвера был реализован OPC-сервер.
Замена устройства не потребует изменения остальных приложений: драйвер изменился, но OPC-интерфейс поверх него остался прежний.
Имеется устройство, управляемое через какой-нибудь сетевой протокол. В этом случае вполне типична реализация OPC-сервера, получающего данные по этому протоколу. Единственная особенность в этом случае предусмотреть механизмы восстановления связи в случае сбоев.
OPC для ОС
Несколько более сложная схема, когда некоторые управляющие приложения работают на компьютере, где не поддерживается COM/DCOM. В этом случае возможна реализация двухкомпонентного OPC-сервера. На стороне ОС, не поддерживающей COM, устанавливается сетевой модуль, который с одной стороны связан с приложением(ями), а с другой стороны связан через сеть с OPC-сервером. Заметим, что сетевой модуль может быть стандартным, как, например, ISaNet в системе ISaGRAF. Тогда необходимо разрабатывать только OPC-сервер. По такому принципу создан, например, OPC-сервер ISaGRAF от фирмы РТСофт (www.rtsoft.ru). Другая разновидность сетевой модуль создаётся специально для OPC-сервера. Возможна даже реализация, когда этот модуль не ориентирован на конкретное приложение, а предоставляет некоторый API-интерфейс для любых приложений, желающих обслуживаться с помощью OPC. Пример такого решения OPC-сервер для операционной системы OS-9, разработанный в компании РТСофт (www.rtsoft.ru).
Ещё одна разновидность OPC-сервера шлюз к сети полевой шины, такой как Profibus или Lonworks. С точки зрения реализации это очень похоже на предыдущие случаи. Скорее всего, на компьютере с ОС Windows будет установлен адаптер fieldbus-сети, а OPC-сервер будет работать с этой сетью через драйвер адаптера. В Internet можно найти немало таких примеров.
Идея такой схемы достаточно очевидна. Сеть полевой шины работает в жёстком реальном времени, а OPC предоставляет менее требовательный шлюз к этой сети из приложений более высокого уровня.
Назначение систем автоматики. Сложность системы, интеллектуальные датчики.
Системы автоматики предназначены для управления технологическим оборудованием по заданным алгоритмам в автоматическом или полуавтоматическом режиме, а также для сбора, обработки и передачи информации о состоянии объекта на рабочее место диспетчера. Системы автоматики являются программируемыми проектно-компонуемыми изделиями. Применяются для построения систем автоматизации самых различных технологических объектов.
Интеллектуальные датчики
Создание микропроцессора, а затем и персонального компьютер (ПК) IBM в 1980-х гг. привело к развитию аппаратно-программных средств обработки данных. Стало доступно множество плат для сбора данных, подключаемых к шине IBM с комплексным программным обеспечением (ПО) для сбора, обработки, анализа и отображения информации. Такие инструменты были названы «интеллектуальными». Чаще стали появляться интеллектуальные датчики с встроенными микропроцессорами, которые позволяют производить обработку информации непосредственно в самом датчике. Устройства с микропроцессором получают название «интеллектуальные датчики».
Перед применением интеллектуальных датчиков важно понять ограничения, накладываемые на результаты измерений вследствие использования цифровых систем. Обычно информация, получаемая с датчика - аналоговая, плавно меняющаяся функция времени. Однако при использовании такой информации в интеллектуальных датчиках в цифровой системе она должна удовлетворять двум ограничениям. Во-первых сигнал, поступающий на интеллектуальный датчик должен быть дискретизирован по времени. Иногда это называется дискретной выборкой по времени, или просто дискретизацией. Во время обработки полученных значений измерении, система находится в выключенном состоянии, при этом часть измеряемой информации (если она измеряется не интеллектуальными датчиками) может быть потеряна. Разрешение измеряемой информации будет уменьшено из-за того, что цифровая система работает с фиксированным количеством бит информации. Следовательно, поступающая информация на интеллектуальные датчики становится дискретной по амплитуде
Термин «интеллектуальные» для первичных устройств подразумевает наличие микропроцессора внутри.
Интеллектуальный датчик может давать более точные показания благодаря применению числовых вычислений для компенсации нелинейности чувствительного элемента или температурной зависимости; имеет возможность работать с большой разновидностью разных типов чувствительных элементов, а также производить два и более измерений параметров (например объем, расход, температуру – в массу); позволяет производить настройку на другой диапазон измерений, осуществлять самодиагностику, что упрощает тех. обслуживание. Может быть размещен на больших расстояния от вычислительных устройств.
Сложность системы – это свойство, обусловленное внутренней закономерностью системы, которое определяет несколько важных параметров, включая пространственную структуру и свойства протекающих в этой структуре процессов. Такое определение сложности понимается как определенная физическая характеристика природы.
Иногда сложность и нелинейность рассматриваются как синонимы. Так как именно нелинейность внутренних закономерностей лежит в основе сложности природных систем. Чем сложнее какой-либо процесс или чем сложнее геометрическая форма какого-нибудь объекта, тем более она нелинейна. Правда, сложность нелинейности начали изучать с недавних пор. Вообще сложным является все, что во времени меняется неравномерно или не имеет простую геометрическую форму. Достаточно сложными могут быть и некоторые линейные системы (например, войсковые соединения). Сложность заключается, в первую очередь, в разнообразии природы, в избыточности функций и форм.
Сегодня можно выделить две основные формы сложности систем: структурную (геометрическую) и динамическую. Очевидно, что в принципе можно выделить и другие формы сложности систем. Например, иерархическую и алгоритмическую сложность. Алгоритмическая сложность лежит во многих программных системах. Это наиболее сложные объекты, создаваемые человеком, хотя их структура и динамика относительно просты.
Динамическая, структурная, алгоритмическая и иерархическая сложность систем привлекает больше внимания потому, что человек именно с проявлением нелинейности природы имеет ежедневные отношения.
Сложность системы является качественной характеристикой, для которой до сих пор не существует формальных методов оценки. Интуитивно показатель сложности должен каким-то образом характеризовать сложность структуры и поведения системы, а также трудности, связанные с ее изучением, созданием и использованием. Кроме того, из двух идентичных систем обычно выбирают менее сложную, поэтому сложность должна иметь и относительную оценку. Необходимость оценки сложности систем обусловлена потребностью в определении эксплуатационных, технологических, технико-экономических и проектных характеристик создаваемых или существующих систем. Эти характеристики должны давать интегральную оценку системы, независимо от вида системы, а также основания для принятия решений о выборе принципов построения проектируемых и методов изучения существующих систем. Известны подходы, в которых сложность системы определяется: · количеством элементов и связей системы; · числом состояний системы; · объемом вычислений, необходимых для изучения системы; · количеством двоичных разрядов, необходимых для описания системы. Эти подходы являются узконаправленными и не позволяют в полной мере оценить сложность системы.
Структура СА



При разработке проекта автоматизации в первую очередь необходимо решить вопросы выбора структуры управления, т.е. с каких мест те или иные участки объекта будут управляться, где будут размешаться пункты управления, операторские помещения, какова должна быть взаимосвязь между ними.
Под структурой управления понимается совокупность частей автоматической системы, на которые она может быть разделена по определенному признаку, а также пути передачи воздействий между ними Графическое изображение структуры управления называется структурной схемой. Хотя исходные данные для выбора структуры управления и ее иерархии с той или иной степенью детализации оговариваются заказчиком при выдаче задания на проектирование, полная структура управления должна разрабатываться проектной организацией.
Выбор структуры управления объектом автоматизации оказывает существенное влияние на эффективность её работы, снижение относительной стоимости системы управления, ее надежности, ремонтоспособности и т.д.
Централизованные системы автоматики. Распределенные системы.
Централизованные системы
Необходимость горячего резервирования центрального процессора
Сложности при внедрении
Сложная исполняемая программа
Уникальность исполняемой программы для каждой станции
Мощный и как следствие дорогой центральный процессор
Невозможность незапланированного наращивания системы
Распределенные системы
Упрощение прикладного программного обеспечения за счет разбиения общей программы управления на ряд простых подпрограмм
Повышение быстродействия системы за счет распараллеливания вычислений
Возможность пространственного приближения интеллекта к технологическому узлу и сокращение затрат на кабельную продукцию
Повышение живучести системы без 100%-го резервирования интеллектуальных ресурсов
Возможность резервирования интеллектуальных технических ресурсов в соответствии с принятыми правилами
Возможность незапланированного наращивания системы
Возможность проведения последовательной реконструкции технологического объекта
Возможность создания нормализованных программно-технических комплексов, построенных по модульному принципу
Распределенные системы автоматики (РСА) на базе микропроцессорных контроллеров в настоящее время находят все большее применение в различных отраслях промышленности. Это связано со многими очевидными преимуществами, которые такие системы имеют по отношению к централизованным. К таким преимуществам относятся:
существенное сокращение затрат на кабельную продукцию, так как модули ввода/вывода могут располагаться в непосредственной близости от датчиков (в специальном исполнении такие модули могут располагаться даже во взрывоопасных зонах);
сокращение затрат на проектирование и строительно-монтажные работы;
возможность «горячей» замены модулей при их обслуживании и ремонте (при этом количество отключаемых каналов ввода/вывода относительно небольшое за счет использования малоканальных модулей);
в распределенных системах с резервированием использование малоканальных модулей позволяет резервировать только критичные (наиболее ответственные) каналы ввода/вывода, а остальные каналы оставлять без резервирования, что существенно удешевляет систему;
наличие «интеллекта» в модулях ввода/вывода позволяет иметь более глубокую диагностику каналов ввода/вывода, а передача информации процессорному устройству по последовательному каналу с использованием стандартных протоколов обеспечивает высокую достоверность передачи входных/выходных данных;
наличие встроенных блоков питания датчиков (аналоговых: типа 4…20 мА и дискретных: типа «сухой контакт») в модулях для РСА существенно упрощает схемотехнику контроллера и увеличивает его надежность.
К недостаткам РСА можно отнести более высокую стоимость канала модуля ввода/вывода в связи с использованием интеллектуальных малоканальных модулей, но с учетом снижения стоимости кабельной продукции этот недостаток с лихвой окупается. Другим недостатком является то, что удаленные модули ввода/вывода, подключенные, как правило, по интерфейсу RS-485, могут потерять связь с процессорным устройством при физическом повреждении кабеля или при выходе из строя интерфейсного буферного устройства и т.п. Однако этого можно избежать, если использовать двухинтерфейсный последовательный канал. Затраты на использование двух интерфейсных кабелей с лихвой окупятся увеличением надежности системы. РСА могут быть выполнены с использованием различных сетевых структур (магистральных, кольцевых, радиальных, комбинированных и др.). По распределению «интеллекта» РСА можно условно разделить на системы с распределенными процессорными устройствами, выполняющими алгоритмы локального управления, и РСА с централизованным «интеллектом». В последнем случае в качестве центрального устройства используется высокопроизводительное процессорное устройство (как правило, с резервированием), а остальные более простые и дешевые процессорные устройства выполняют роль концентраторов данных. К ним подключаются модули удаленного ввода/вывода.

Структурные схемы АСУ. Экранные формы.



Определение ПЛК. Достоинства ПЛК
Программируемый логический контроллер (ПЛК, PLC) – это программно управляемый дискретный автомат, имеющий некоторое множество входов, подключенных посредством датчиков к объекту управления, и множество выходов, подключенных к исполнительным устройствам.
ПЛК предназначены для работы в режиме реального времени в
условиях промышленной среды.
Изначально ПЛК предназначались для управления последовательными логическими процессами.
Современные ПЛК помимо логических операций способны выполнять цифровую обработку сигналов, управление приводами, регулирование, функции операторского управления.
Первые ПЛК были применены в США для автоматизации конвейерного сборочного производства в автомобильной промышленности (фирма Модикон, 1969 г.)
Сейчас ПЛК работают в энергетике, области связи, в химической промышленности, в сфере добычи, транспортировки нефти и газа, в системах обеспечения безопасности, в коммунальном хозяйстве, используются в автоматизации складов, производстве продуктов питания, на транспорте, в строительстве и т.д.
Достоинства:
Переносимость программ благодаря стандартизации
языков программирования
Широкие функциональные возможности
Возможность быстрой замены
Простота эксплуатации
Простота программирования
Режим реального времени
Ремонтопригодность
Надежность в условиях промышленной среды
Возможность системной интеграции
Ф изически
стандартный ПЛК представляет собой
блок, имеющий определенный набор входов
и выходов для подключения датчиков и
исполнительных механизмов. Логика
управления описывается программно на
основе микроконтроллерного ядра.
Абсолютно одинаковые ПЛК могут выполнять
совершенно разные функции. Причем для
изменения алгоритма работы не требуется
каких-либо переделок аппаратной части.
Задачей прикладного программирования
ПЛК является только реализация алгоритма
управления заданной логикой. Опрос
входов/выходов контроллер осуществляет
автоматически не зависимо от способа
физического соединения. Эту работу
выполняет системное ПО.
изически
стандартный ПЛК представляет собой
блок, имеющий определенный набор входов
и выходов для подключения датчиков и
исполнительных механизмов. Логика
управления описывается программно на
основе микроконтроллерного ядра.
Абсолютно одинаковые ПЛК могут выполнять
совершенно разные функции. Причем для
изменения алгоритма работы не требуется
каких-либо переделок аппаратной части.
Задачей прикладного программирования
ПЛК является только реализация алгоритма
управления заданной логикой. Опрос
входов/выходов контроллер осуществляет
автоматически не зависимо от способа
физического соединения. Эту работу
выполняет системное ПО.
Состав ПЛК. Технические характеристики.
Состав ПЛК:
модуль процессора;
модули дискретных входов постоянного тока;
модули дискретных выходов постоянного тока;
модули дискретных выходов переменного тока с развязкой по питанию;
модуль индикации и клавиатуры;
платы коммутации;
объединительная плата.
Технические характеристики:
Количество дискретных входов
Количество дискретных выходов
Количество аналоговых входов (10 бит)
Количество программ содержащихся во FLASH
Количество одновременно выполняемых программ
Объем доступной памяти программ FLASH
Время отклика на внешнее событие
Физический интерфейс
Напряжение питания
Потребляемая мощность (от количества модулей)
Время реакции ПЛК. Режим реального времени и ограничения ПЛК.

Для ПЛК время реакции зависит от распределения возникновения события и начала фазы чтения входов. Время реакции не превышает удвоенного времени сканирования.
Помимо времени реакции ПЛК существенное значение имеет время реакции датчиков и исполнительных механизмов. Существуют ПЛК которые реализуют команды непосредственного доступа к аппаратуре входов/выходов, что позволяет формировать отдельные сигналы с длительностью цикла меньше длительности рабочего цикла. Для уменьшения времени реакции сканирования контроллеров, алгоритм программы разбивается на несколько задач с различным периодом выполнения. Время цикла сканирования является базовым показателем быстродействия ПЛК.
При измерении времени рабочего цикла пользовательская программа должна совершать 1000 логических команд. Ориентировочно о скорости обработки различных типов данных можно судить по тактовой частоте и разрядности центрального процессоры. Хотя нет ничего удивительного, что 8-ми разрядные ПЛК оказываются быстродейственнее 32-х разрядных при выполнении битовых операций. Объясняется это тем , что в 8-ми разрядных процессорах более распространена аппаратная поддержка с битами, а в РС современных процессорах для выделения бита необходимо использовать логические команды и циклические сдвиги.

Входы/выходы ПЛК.


Автоматы и алгоритмы.
Алгоритм – это точно определенная, возможно циклически повторяемая инструкция по преобразованию входных данных в выходные.
Формы представления алгоритмов:
Например описание алгоритма Евклида нахождения НОД (наибольшего общего делителя) двух целых положительных чисел может быть представлено в виде трех шагов.
Шаг 1: Разделить m на n. Пусть p – остаток отделения.
Шаг 2: Если p равно нулю, то n и есть исходный НОД.
Шаг 3: Если p не равно нулю, то сделаем m равным n, а n равным p.

Машина Поста (МП) – абстрактная машина, которая работает по алгоритмам, разработанным человеком, и обладает следующим свойством: если для решения задачи можно построить машину Поста, то она алгоритмически разрешима.

Команды машины Поста:
n. → a - Cдвиг каретки вправо и переход к строке a
n. ← a - Сдвиг каретки влево и переход к строке a
n. v a - Запись метки и переход к строке a
n. ´ a - Удаление метки и переход к строке a
n. ? a, b - Проверка состояния ячейки; если ячейка пустая, то перейти к строке a, иначе перейти к строке b
n. ! - Останов
Машина Тьюринга (МП) – представляет собой некоторое автоматически действующее устройство управления (УУ), способное находиться в конечном числе внутренних состояний: S = {s0, s1, …, sp} (от англ.state), и снабженное бесконечной внешней памятью – лентой (Л). Среди состояний имеются два выделенных – начальное (s1) и заключительное (s0). Лента разделена на ячейки (клетки) и не ограничена влево и вправо.

Автомат:
Первые ЭВМ рассматривались как преобразователи дискретных данных. Поэтому в литературе было достаточно распространено альтернативное название для ЭВМ –дискретные, или цифровые автоматы (устройства, машины).
«автомат» – это «аппарат(машина, прибор, устройство), после включения самостоятельно выполняющий ряд заданных операций». Слово «абстрактный» можно переводить как «существующий только с математической точки зрения». Это слово используется потому, что с математической точки зрения множества состояний, входных и выходных символов у автомата могут быть бесконечными множествами. Разумеется, все существующие на практике цифровые устройства, будучи представлены в виде абстрактного автомата, имеют конечные множества S, I, O. В рамках теории автоматов модели таких устройств называются конечными автоматами.
Для формализации решения задач синтеза дискретных устройств была предложена математическая модель в виде абстрактного автомата, во многом сходная с машиной Тьюринга. Абстрактный автомат A задается шестеркой:
A = (S, I, O, Fs, Fo, s1), у которого:
1. S = {s1, . . . , sk, . . . , sK} – множество состояний (алфавит состояний);
2. I = {i1, . . . , im, . . . , iM} – множество входных символов (входной
алфавит);
3. O = {o1, . . . , on, . . . , oN} – множество выходных символов (выход-
ной алфавит);
4. Fs : S х I - S – функция переходов, отображающая DFs в поле S х I в S.
Другими словами, функция Fs некоторым парам состояние – входной сим-
вол (sk, im) ставит в соответствие состояние автомата sj = Fs (sk, im), sj принадлежит S ;
5. Fo : S х I - O – функция выходов, отображающая DFo в поле S х I в O.
Функция Fo некоторым парам состояние – входной символ (sk, im) ставит в соответствие выходные символы автомата, on = Fs (sk, im), on принадлежит O ;
6. s1 принадлежит S – начальное состояние автомата.
Обозначения выбраны по следующим соображениям: A – от «automaton», S / s – от «state», I / i – от «input», O / o – от «output», F – от«function».
Автомат называется полностью определенным, если DFs = DFo = S х I.

Автоматы Мили и Мура


Один из мощных разделов теории автоматов – математическая лингвистика, в частности, широко используемая при создании трансляторов языков программирования.
Другая широчайшая область их применения – конструирование информационно-управляющих систем, в котором «входная» и «выходная» ленты служат для общения с внешней средой, например с объектом управления. «Входная лента» подменяется потоком данных о состоянии объекта управления, а «выходная лента» – сигналами управления, формируемыми управляющим алгоритмом.
Синтез конечного автомата. Системный подход
При построении сложного дискретного устройства выделяется несколько этапов:
На 1 этапе, называемом этапом блочного синтеза, осуществляется разбиение схемы автомата на отдельные более простые блоки-автоматы и определяется общий план обмена данными между этими блоками;
на 2 этапе, который называется этапом абстрактного синтеза, строится алгоритм блоков в виде конечного автомата, выбирается форма описания, определяются функции-состояния без привязки к реализующим автомат элементам;
3 этап – структурный синтез, выбор логических и запоминающих элементов (триггеров, И-НЕ сборок и т. п.) для построения спроектированных блоков, и на основе специальных формальных методик – так называемых «канонических уравнений» – общая задача синтеза автомата-блока сводится к синтезу схем из элементов дискретного действия, не обладающих памятью;
4 этапом является синтез этих по следних схем, называемый обычно комбинационным синтезом;
на 5 последнем этапе производятся преобразования и дополнения к спроектированным схемам с целью обеспечения надежности и устойчивости их функционирования.
Устройство ПЛК.

Характерным для современных ПЛК является использование многопроцессорных решений. В этом случае модули ввода/вывода имеют собственные микропроцессоры, выполняющие предварительную обработку данных. Модуль центрального процессора имеет выделенную скоростную магистраль данных для работ с памятью и отдельную магистраль для общения с модулями ввода/вывода.
Ещё одним вариантом построения ПЛК является мезонинная технология. Все силовые цепи устройства защиты контроллера выполняются на несущей плате. Процессорное ядро контроллера выполнено отдельно на отдельной, съемной мезонинной плате. В результате появляется возможность составлять различные комбинации процессорного ядра и различных силовых плат без корректировки ПО.
Системное ПО ПЛК. Прикладное ПО ПЛК.


МЭК 61131 Стандарты проектирования ПЛК.
Программируемым контроллерам посвящена серия стандартов Международной электротехнической комиссии (МЭК) IEC 61131 (ранее обозначавшихся как IEC 1131), которые разрабатываются в одной из рабочих групп подкомитета 65В МЭК. Серия состоит из 8 частей, которые охватывают как аппаратные средства программируемых контроллеров (АПК),так и их программное обеспечение (ПО).
IEC61131- 1 Общая информация.
IEC61131- 2 Требования к оборудованию и тестам.
IEC61131- 3 Языки программирования. (программная модель)
IEC61131- 4 Руководства пользователя.
IEC61131- 5 Спецификация сообщений.
IEC61131- 6 Промышленные сети.
IEC61131- 7 Программирование с нечеткой логикой.
IEC61131- 8 Руководящие принципы применения и реализации языков ПЛК.
Первая часть этой серии стандартов - стандарт IEC61131-1 посвящен общему описанию программируемого контроллера, включая терминологию по ПЛК, описание его структуры
и функциональных характеристик - функций обработки сигналов, интерфейсов ввода-вывода связи, человеко-машинного взаимодействия, программирования, надежности и эргономики.
МЭК 61131. Программная модель.

Основные понятия программной модели:
POU – Program Organization Unit (Компонент организации программ)
Базовые элементы программной организации: функция, функциональный блок, программа.
Program (Программа)
Самый крупный программный компонент, который может включать в себя более мелкие программные компоненты (функции, функциональные блоки).
Task (Задача)
Исполняемый элемент управления, обеспечивающий выполнение (периодическое или по прерываниям) программы, ассоциированной с этой задачей.
Resource (Ресурс)
Элемент, соответствующий процессору ПЛК, снабженному собственной системой исполнения. В ресурс загружается одна или несколько задач для исполнения.
Configuration (Конфигурация)
Множество ресурсов, взаимодействующих определенным образом.
Инструменты программирования ПЛК.
Для программирования ПЛК обычно применяют ПК.
Процесс разработки и отладки осуществляется при помощи специализированных комплексов программ.
Специализированные фирмы предлагают сегодня очень мощные комплексы с поддержкой МЭК - языков.
Комплексы, пользующиеся наибольшей известностью в мире:
CoDeSys SoftCONTROL
ISaGRAF iCon-L
MULTIPROG wt OpenPCS
Инструменты комплексов программирования ПЛК:
Встроенные редакторы: классические ассемблеры и компиляторы для перевода текста в код.
Текстовые редакторы: быстрый ввод текстовых элементов, автоматическое объявление переменных, проверка синтаксиса и автоформатирование ввода, автонумерация строк.
Графические редакторы: автотрассировка соединений компонентов, автоматическая расстановка компонентов, автонумерация цепей, произвольное масштабирование изображения.
Средства отладки: унифицированный механизм соединения с ПЛК, выполнение программы в режиме реального времени, останов, сброс ПЛК, мониторинг значений переменных, пошаговое выполнение программы и т.д.
Средства управления проектом: создание и удаление компонентов, настройка транслятора, управление библиотеками, документирование проекта.
Функция. Функциональные блоки.
Function (Функция)
Имеет один или более входов (отсутствие входов не допускается);
Имеет исключительно единственное выходное значение;
Не имеет «памяти» от одного вызова до другого, и всегда будет возвращать один и тот же выход при получении одних и тех же входов;
При каждом вызове функции значения всех входов должны быть заданы;
Может вызывать другие функции, но не разрешается вызывать функциональные блоки.
Function Block (Функциональный блок)
Может иметь один, более одного или ни одного входа;
Может иметь один, более одного или ни одного выхода;
Могут быть вызваны только экземпляры функционального блока, но не сам блок;
Имеет «память» от одного вызова до другого; каждый экземпляр сохраняет личную копию всех данных, связанных с этим функциональным блоком (входные, выходные, промежуточные);
При вызове функционального блока нет необходимости задавать значения всех входов; не предоставленные данные будут сохранять значение от предыдущего вызова (или значение по умолчанию, если предыдущего вызова не было);
Может вызывать функции и экземпляры других функциональных блоков.
Данные и переменные
Идентификаторы
Состоят из печатных символов и цифр.
Начинаются с буквы или знака подчеркивания.
Регистр букв не учитывается.
Символы кириллицы использовать нельзя.
Для разделения слов используют знак подчеркивания. Два знака подчеркивания подряд использовать нельзя.
Пробелы использовать нельзя.
Не должны совпадать со служебными словами.

|
|
|
|
|
|
|
|
|
|
|
Псевдонимы типов применяют, когда требуется использовать различные типы переменных для одного и того же параметра. Определяется новый тип данных: TYPE TEMPERATURA: UINT; END_TYPE Этот новый тип TEMPERATURA далее используется в программе при объявлении переменных. Если понадобится изменить тип, например на INT, это быстро можно сделать в одном месте. Псевдонимы типов удобно создавать для любых часто используемых в программе типов.
|












5-ть языков программирования стандарта МЭК 61131
В стандарте IEC 61131 – 3 определены следующие языки:
два текстовых языка программирования:
IL – Instruction List (список инструкций)
ST – Structured Text (структурированный текст)
два графических языка программирования:
LD – Ladder Diagram (лестничная диаграмма)
FBD – Function Block Diagram (диаграмма функциональных блоков)
а также конкретизирован для контроллеров высокоуровневый графический инструмент:
SFC – Sequential Function Chart (последовательная функциональная диаграмма),
введенный ранее как стандарт IEC 848.
Sequential Function Chart — язык программирования стандарта IEC61131-3. Предназначен для программирования промышленных контроллеров. Широко используется в SCADA/HMI пакетах.
SFC — графический язык, описывающий диаграмму состояний. Аналогом может служить сеть Петри с разноцветными фишками. К каждому состоянию могут быть подключены действия (подпрограммы) с определенными модификаторами. Например, модификатор N — исполнять, пока состояние активно.
Пример: Поддержание уровня жидкости в сосуде с непрерывно вытекающей жидкостью

Язык ST.
Язык ST (Structured Text) – это язык высокого уровня. Синтаксически ST представляет собой несколько адаптированный язык Паскаль.
SUM := 0 ; FOR I := 1 TO 3 DO FOR J := 1 TO 2 DO IF FLAG THEN EXIT ; END_IF ;
SUM := SUM + J ; END_FOR ;
SUM := SUM + I ; END_FOR ;






Язык IL.


GT |
Сравнение: > |
GE |
Сравнение: >= |
EQ |
Сравнение: = |
NE |
Сравнение: <> |
LE |
Сравнение: <= |
LT |
Сравнение: < |
JMP |
Безусловный переход к метке |
CAL |
Безусловный вызов функционального блока |
RET |
Безусловный выход из POU и возврат в вызывающую программу |
JMPC, JMPCN |
Условный переход к метке |
CALC, CALCN |
Условный вызов функционального блока |
RETC, RETCN |
Условный выход из POU и возврат в вызывающую программу |

Язык LD.



Язык FBD.
Язык FBD (Function Block Diagram) – графический язык программирования. Диаграмма FBD напоминает принципиальную схему электронного устройства на микросхемах. Шины питания на FBD не показывают. Выходы блоков могут быть поданы на входы других блоков либо непосредственно на выходы ПЛК.
В отдельной цепи может быть использовано несколько операций и вызовов функций. Вызовы функциональных блоков отображаются каждый как самостоятельная цепь.


Сети, ЛВС. Узкополосная. Широкополосная.
Сеть – это сложный комплекс взаимосвязанных и согласованно функционирующих программных и аппаратных компонентов (группа компьютеров соединенных между собой кабелем или другой средой передачи данных).
В зависимости от среды передачи данных сети подразделяют на
Проводные (воздушные)
Кабельные (медные и волокно-оптические)
Радиоканалы наземной и спутниковой связи
Провод — это одна неизолированная, одна или более изолированных жил, поверх которых, в зависимости от условий прокладки и эксплуатации, может иметься неметаллическая оболочка, обмотка или оплетка волокнистыми материалами или проволокой. Провода могут быть голыми и изолированными.
Кабелем называется одна или несколько скрученных вместе изолированных жил, заключенных, как правило, в общую резиновую, пластмассовую, металлическую оболочку (НРГ, КГ, АВВГ н др.). Оболочка служит для защиты изоляции жил от воздействия света, влаги, различных химических веществ, а также для предохранения ее от механических повреждении.
Элементы сети:
компьютеры;
коммуникационное оборудование;
операционные системы;
сетевые приложения.
Основная цель сети - обеспечить пользователям сети потенциальную возможность совместного использования ресурсов всех компьютеров
Использование вычислительных сетей дает предприятию следующие возможности:
разделение дорогостоящих ресурсов;
совершенствование коммуникаций;
улучшение доступа к информации;
быстрое и качественное принятие решений;
свобода в территориальном размещении компьютеров.
ЛВС – группа компьютеров, объединенных совместно используемой средой передачи данных, как правило кабелем. Используя единый кабель каждый компьютер требует только одной точки подключения к сети и при этом может свободно взаимодействовать с любым другим компонентов сети. Геометрически всегда ЛВС ограничено по размерам небольшой площадью, в силу электрических свойств кабеля, используемого для построения сети и относительно небольшим количеством компьютеров.
ЛВС обычно располагаются в пределах одного здания или несколько близкорасположенных. Для соединения между городами применяются глобальные сети (WAN). В большинстве случаев ЛВС - компьютерная сеть с узкополосной передачей и коммуникацией пакетов.
Узкополосные (baseband) системы передают данные в виде цифрового сигнала одной частоты. Сигналы представляют собой дискретные электрические или световые импульсы. При таком способе вся емкость коммуникационного канала используется для передачи одного импульса, или, другими словами, цифровой сигнал использует всю полосу пропускания кабеля. Полоса пропускания — это разница между максимальной и минимальной частотой, которая может быть передана по кабелю.
Каждое устройство в сетях с узкополосной передачей посылает данные в обоих направлениях, а некоторые могут одновременно и передавать их, и принимать. Продвигаясь по кабелю, сигнал постепенно затухает и. как следствие, может исказиться. Если кабель слишком длинный, на дальнем его конце передаваемый сигнал может исказиться до неузнаваемости или просто пропасть. Чтобы избежать этого, в узкополосных системах используют репитеры, которые усиливают сигнал и ретранслируют его в дополнительные сегменты, позволяя тем самым увеличить общую длину кабеля.
Широкополосные (broadband) системы передают данные в виде аналогового сигнала, который использует некоторый интервал частот. Сигналы представляют собой непрерывные (а не дискретные) электромагнитные или оптические волны. При таком способе сигналы передаются по физической среде в одном направлении.
Если обеспечить необходимую полосу пропускания, то по одному кабелю одновременно может идти вещание нескольких систем, таких, как кабельное телевидение и передача данных.
Каждой передающей системе выделяется часть полосы пропускания. Все устройства, связанные с данной системой (например, компьютеры), должны быть настроены таким образом, чтобы работать именно с выделенной частью полосы пропускания.
Если в узкополосных системах для восстановления сигнала используют репитеры, то в широкополосных — усилители (amplifiers).
В широкополосной системе сигнал передается только в одном направлении, поэтому, чтобы все устройства могли и принимать, и передавать данные, необходимо обеспечить два пути для прохождения сигнала. Разработано два основных решения:
разбить полосу пропускания на два канала, которые работают с различными частотами; один канал предназначен для передачи сигналов, другой — для приема;
использовать два кабеля; один кабель предназначен для передачи сигналов, другой - для приема.
В сравнении с ШС, УС могут быть протянуты на меньшее расстояние ввиду потери мощности сигнала. Предельно допустимая длина отрезка кабеля УС меньше уменьшается пропорционально падению пропускной способности.


Локальные сети. Коммутация пакетов, коммутация каналов.
Локальные - сети с коммутацией пакетов, так как компьютеры распределяют данные на отдельные небольшие пакеты перед передачей. Коммуникация ячеек отличается стабильным постоянным ростом ячеек. Тогда как размер пакетов варьируется. Большинство технологий ЛВС (Ethener, TalkinRing и т.д.) используют коммуникацию пакетов. Единственный широкополосный протокол с коммуникацией ячеек это АТМ.
На пакеты информацию делят, чтобы 2 пользователя занимали сеть только на время передачи пакета, затем отправлялись в конец очереди на передачу следующего пакета.
Наряду с коммутацией пакетов существует обратная технология, называемая коммутацией каналов (circuit switching), при которой одна сторона устанавливает прямой канал связи с другой, непосредственно перед передачей данных. ISDN –цифровая сеть связи с интеграцией услуг (используем каждый день набирая телефонный номер).
Пакет – единица информации, передаваемая между устройствами сети как единое целое.
Преимущества пакетной передачи данных:
Пакеты позволяют работать всем компонентам сети без длительных задержек, связанных с передачей большого объёма информации.
Экономия времени при повторной передаче пакета в случае обнаружения ошибки.
Топология. Способы конфигурации.
Различные способы конфигурации соединений кабелей для объединения компьютеров в ЛВС называются топологиями. Они зависят от типа потребляемого кабеля и от поддерживаемого потока.
Наиболее распространены:
Шина – реализуется кабелем прокладываемым от одного компьютера к другому в виде последовательной цепочки. Все сигналы передаваемые любым компьютером в сеть идут в обоих направлениях ко всем компьютерам. Общая шина всегда должна заканчиваться конечной нагрузкой для того чтобы сигнал не отражался и не уходил обратно. Недостаток: Если одно звено выбывает то все соединения прерываются.
Концентратор – использует отдельный кабель для каждого компьютера, проложенный от центрального устройства (НИВа). НИВ транслирует сигналы, поступающие на один из его портов на все остальные порты. В результате чего сигналы посылаемые одним узлом достигают всех компьютеров. Плюс – сеть на основе звезды более устойчива к повреждениям.
Шина-Звезда –формируется из множества звезд, концентраторы в которой соединяют в отдельные сегменты общие шины. Любой коммутатор по прежнему может связываться с другим компьютером в сети поскольку связанный с ним НИВ передает входной трафик через порты звезд.
Простейшей топологией локальной сети можно назвать сеть из двух компьютеров.
Например, если пару компьютеров, оснащенных сетевой картой, связать кабелем
(разведенным особым образом), получим сеть на основе стандарта Ethernet. Но локальная
сеть из более чем двух компьютеров всегда строится с применением топологии локальных
сетей, предусмотренной стандартами их построения.
Вот определение топологии локальной сети: под топологией вычислительной сети
понимается конфигурация графа, вершинам которого соответствуют компьютерные сети
(иногда и другое оборудование например, концентраторы), а ребрам — физические связи
между ними.
Но это определение подразумевает глобальные сети, а мы основное внимание уделяем
локальным сетям. Локальная же получится, если на место компьютерных сетей в
вершинах графа поставить отдельные компьютеры. Как бы там ни было, запомним:
топология — это способ связи нескольких компьютеров в сеть.
О простейшей топологии мы говорили в начале этого раздела: это одна связь,
соединяющая два узла. На нее похожа так называемая кольцевая топология, когда все
узлы сети соединены в кольцо. При этом данные, как правило, передаются от компьютера
к компьютеру в одном направлении. Эта топология используется в некоторых типах
локальных сетей.
Другая очень распространенная топология носит название общей шины. Эта топология
характерна для сетей Ethernet, построенных на основе коаксиального кабеля. Серьезный
минус общей шины состоит в том, что нарушение контакта в одном из соединений или
повреждение одного из отрезков кабеля разбивает сеть на два независимых сегмента,
фактически разрушая ее.
В свое время эта топология была чрезвычайно распространена: старые сети на основе
коаксиального кабеля можно встретить и сегодня.
Второй серьезный недостаток топологии общей шины состоит в том, что пропускная
способность линии делится между всеми компьютерами сети. Этого недостатка отчасти
лишена сеть, построенная по топологии «звезда». Центром такой «звезды» может быть
повторитель или коммутатор.
* Поставив в центр «звезды» повторитель, мы получаем все ту же самую «общую
шину», стянутую в точку, с отдельными линиями для каждого компьютера.
* Если сделать центром «звезды» коммутатор, который позволяет одновременное
общение нескольких компьютеров, получается качественно иная сеть.
Но если в некоторый момент сразу несколько компьютеров захотят общаться с одним и
тем же компьютером, этот «плюс» окажется несущественным. Для нас важнее другое
преимущество «звезды»: ее надежность. Повреждение одного кабеля или разъема отрежет
от сети — «звезды» всего один компьютер, а сеть в целом останется рабочей.
Недостаток «звезды» состоит в сравнительно высокой стоимости оборудования. И все же
«звездная» топология — самая распространенная сегодня топология локальных сетей по
технологии Ethernet. В качестве центра сети все чаще используется коммутатор: из-за его
дешевизны такое решение оправдывает себя даже в простой домашней сети.
Разновидностью топологии «звезда» является топология, соединяющая в иерархическую
структуру сразу несколько сетей, построенных по топологии «звезда». Дело в том, что
коммутаторы могут объединяться в иерархическую сеть. Для достаточно больших сетей
это оправданно. В результате такого объединения получаем «иерархическую звезду».
Топологии «звезда» и «иерархическая звезда» сегодня распространены больше всех: по
ним строятся и локальные, и глобальные сети.
Следующая разновидность — полносвязная топология. В этом случае каждый компьютер
сети имеет по одному интерфейсу для связи с другими. Например, в сети из пяти
компьютеров каждый из них должен иметь по четыре сетевых адаптера, а количество
связей между всеми этими компьютерами достигнет десяти.
Не слишком рационально, не так ли? Ведь в случае обычной «звезды» для пяти
компьютеров понадобилось бы всего пять связей и хватило бы пяти сетевых карт, — правда, пришлось бы «украсить» центр звезды концентратором, но это не меняет общей
картины.
Ячеистая топология — вариант полносвязной. Здесь отсутствует часть связей между
узлами. Такая топология присуща глобальным сетям: в них от некоторых узлов линии
связи могут идти к нескольким другим узлам.
Если же говорить о глобальных сетях в целом, равно как и о сложных, больших
локальных сетях предприятий, то окажется, что существуют так называемые смешанные
топологии, — несколько разнородных локальных сетей, связанных общими магистралями
в единую сеть.
В сетях любой топологии, кроме полносвязной, вынужденно применяется совместное
использование линий связи. Линии связи, используемые несколькими устройствами
передачи данных, еще называют разделяемыми линиями связи. Самым характерным
примером использования разделяемой линии передачи данных является сеть, построенная
по технологии Ethernet на базе коаксиального кабеля.
Сеть, построенная по топологии «звезда» на основе повторителя, логически очень похожа
на сеть, в основе которой лежит коаксиальный кабель. Разница лишь в том, что каждый
компьютер связан с повторителем индивидуальным кабелем в отличие от сети на
коаксиале, где компьютеры связаны одним кабелем или сегментами кабеля,
объединенными в единую линию передачи данных. Обратите внимание: в сети с
повторителем, несмотря на наличие отдельных линий связи, все кабели составляют
единую среду передачи данных. Такая сеть надежнее, чем сеть на коаксиале, но не имеет
принципиальных преимуществ перед ней. А вот звездообразная топология с
коммутатором в центре — это пример использования индивидуальных линий связи и
индивидуальной среды передачи данных. Коммутатор способен одновременно связывать
несколько компьютеров между собой, изолируя отдельные пары связанных компьютеров
от других машин.

А) Полносвязная топология
Б) Ячеистая топология
В) Общая шина
Г) Топология звезда
Д) Иерархическая звезда
Е) Кольцо
Недостатки топологий. Комбинации топологий.
Кроме рассмотренных базовых топологий нередко применяется также сетевая топология
дерево (tree), которую можно рассматривать как комбинацию нескольких звезд. Причем,
как и в случае звезды, дерево может быть активным или истинным (рис. 1.13) и
пассивным (рис. 1.14). При активном дереве в центрах объединения нескольких линий
связи находятся центральные компьютеры, а при пассивном — концентраторы (хабы).
 Топология
активное дерево
Топология
активное дерево
 Топология
пассивное дерево К-концентраторы
Топология
пассивное дерево К-концентраторы
Довольно часто применяются комбинированные топологии, среди которых наиб
распространены звездно-шинная и звездно-кольцевая.


В звездно-шинной (star-bus) топологии используется комбинация шины и пассивной
звезды. К концентратору подключаются как отдельные компьютеры, так и целые шинные
сегменты. На самом деле реализуется физическая топология шина, включающая все
компьютеры сети. В данной топологии может использоваться и несколько
концентраторов, соединенных между собой и образующих так называемую
магистральную, опорную шину. К каждому из концентраторов при этом подключаются
отдельные компьютеры или шинные сегменты. В результате получается звездно-шинное
дерево. Таким образом, пользователь может гибко комбинировать преимущества шинной
и звездной топологий, а также легко изменять количество компьютеров, подключенных к
сети. С точки зрения распространения информации данная топология равноценна
классической шине.
В случае звездно-кольцевой (star-ring) топологии в кольцо объединяются не сами
компьютеры, а специальные концентраторы (изображенные на рис. 1.16 в виде
прямоугольников), к которым в свою очередь подключаются компьютеры с помощью
звездообразных двойных линий связи. В действительности все компьютеры сети
включаются в замкнутое кольцо, так как внутри концентраторов линии связи образуют
замкнутый контур (как показано на рис. 1.16). Данная топология дает возможность
комбинировать преимущества звездной и кольцевой топологий. Например,
концентраторы позволяют собрать в одно место все точки подключения кабелей сети.
Если говорить о распространении информации, данная топология равноценна
классическому кольцу.
В заключение надо также сказать о сеточной топологии (mesh), при которой компьютеры
связываются между собой не одной, а многими линиями связи, образующими сетку.

В полной сеточной топологии каждый компьютер напрямую связан со всеми остальными
компьютерами. В этом случае при увеличении числа компьютеров резко возрастает
количество линий связи. Кроме того, любое изменение в конфигурации сети требует
внесения изменений в сетевую аппаратуру всех компьютеров, поэтому полная сеточная
топология не получила широкого распространения.
Частичная сеточная топология предполагает прямые связи только для самых активных
компьютеров, передающих максимальные объемы информации. Остальные компьютеры
соединяются через промежуточные узлы. Сеточная топология позволяет выбирать
маршрут для доставки информации от абонента к абоненту, обходя неисправные участки.
С одной стороны, это увеличивает надежность сети, с другой же – требует существенного
усложнения сетевой аппаратуры, которая должна выбирать маршрут.
Недостатки:
а)высокие затраты; небольшое количество подключаемых компьютеров.
б) используется при построении глобальных сетей
в)все сигналы, передаваемые любым компьютером в сеть идут по шине в сеть на все остальные компьютеры.
Сетевые комплексы, Аппаратные средства.
Сетевой комплекс (информационно-вычислительная сеть) – это комплекс вычислителей, находящихся на значительном расстоянии друг от друга (более тысячи метров) и соединенных коммуникационной системой.
Сетевые комплексы являются важной частью комплексных информационных вычислительных систем (КИВС). От эффективности и надежности их работы зависит в целом работа КИВС. Сетевые комплексы, создаваемые группой компаний ТИМ, строятся на принципах обязательного и полного соответствия отечественным и международным стандартам и обеспечивают высокую производительность, богатый набор функциональных возможностей и надежность в соответствии с самыми строгими требованиями.
Производительность работы сетевого комплекса во многом зависит правильности выбора активного сетевого оборудования, которое используется для передачи данных. При поиске компромисса между производительностью и экономичностью необходимо точно представлять потребности заказчика, в том числе и на перспективу. При необходимости с помощью моделирования определяется требуемый уровень производительности или проверяется совместимость с имеющимся оборудованием заказчика.
Аппаратные средства связи компьютеров, обеспечивающее работу группы как единое целое.
Кабель "Витая пара"
Не одна сеть не обходится без прокладки проводов. Для сети используются провода типа
витая пара UTP.
Витая пара UTP (Unshielded Twisted Pair) представляет собой изолированные попарно
свитые одножильные провода, при чем, число переплетений пар имеет разный шаг, на
определенном отрезке длины кабеля. Это делается для сокращения перекрестных наводок
между проводниками.
Во время монтажа кабеля типа "витая пара", важно обеспечить минимально допустимую
величину развития пар кабеля, для уменьшения потерь сигнала в кабеле.
Сетевые адаптеры
Сетевой адаптер (с драйвером) реализуют физический уровень и подуровень MAC
канального уровня. Основная функция сетевого адаптера – передача и прием кадров
между компьютером и средой передачи (кабелем).
Передача кадра в кабель состоит из следующих этапов:
прием через интерфейс LLC-кадра и адресной информации (через общие области
памяти)
оформление MAC-кадра (отброс флагов, заполнение адресов, вычисление CRC)
логическое кодирование (при использовании избыточных кодов – 4B/5B, 8B/6T, др.) –
если есть необходимость
выдача сигнала в кабель с использованием физического кода (манчестерский,
NRZI,MLT-3, др.)
Прием кадра из кабеля:
- прием сигналов
- выделение сигнала из шума (выделение битовой последовательности)
- логическое декодирование (если оно используется)
- проверка CRC; если ошибка , то кадр отбрасывается, иначе извлекается LLC-кадр и
передается LLC-подуровню (через общую область памяти)
Рабочие станции обычно оснащаются более простыми адаптерами, основную работу при
этом выполняет драйвер. Для серверов разрабатываются более интеллектуальные
адаптеры, со встроенными процессорами и т.п.
Концентраторы
Основная функция концентратора – повторение каждого полученного сигнала на всех (для
Ethernet) или на некоторых портах. Соответственно, наиболее общее название для такого
рода устройств – повторитель (repeater). Для 10BaseT Ethernet с топологией “звезда”
традиционно используется термин “хаб” (hub). Все эти термины равноправны и
взаимозаменяемы. Концентратор работает на физическом уровне модели OSI (поскольку
имеет дело с электрическими сигналами, их уровнями, полярностями и т.д.) и на
канальном уровне (повторители Ethernet, например, умеют распознавать коллизии), но не
выполняет никакого анализа кадров.
К каждому порту концентратора подключаются либо конечные узлы, либо другие
концентраторы или другие сетевые устройства, либо (например, в 10Base2 Ethernet) целые
физические сегменты кабеля.
Концентратор используется, прежде всего, для увеличения диаметра сети и количества
подключенных узлов. Основные технологии локальных сетей допускают использование
несколько концентраторов в одной сети, но при некоторых условиях. Например, между
любой парой узлов в сети Ethernet может быть не более четырех повторителей
(соответственно, максимальный путь включает пять сегментов, причем узлы могут
подключаться только к трем из них – так называемое правило “5-4-3”), задержка
распространения сигнала между любой парой узлов не должна превышать 25 мкс.
Сеть, построенная на концентраторах, образует единый домен коллизий. Каждый пакет,
выданный любой узлом, должен достичь всех остальных узлов, и в это время никакой
другой узел не может передавать данные.
С увеличением количества узлов в сети растет частота коллизий, и полезная пропускная
способность быстро уменьшается. Для технологий Ethernet приемлемой оказывается
нагрузка в 40-50% от максимальной пропускной способности. То есть, пока общий объем
передаваемых данных не превышает 40-50% от 10 Мбит/с (для Ethernet), сеть работает
нормально, а при росте нагрузки полезная пропускная способность быстро падает.
Приемлемое количество узлов в сети, если передаются не мультимедийные данные, лежит
около 30.
Конструктивно концентраторы выпускаются в одном из трех вариантов: автономные
(standalone), стековые, модульные, модульно-стековые.
Автономные и стековые концентраторы выполняются в виде отдельного корпуса с
фиксированным количеством и типом портов (обычно до 24). Все порты, как правило,
поддерживают одну среду передачи. Иногда выделяется порт для подключения к
магистрали или каскадирования. Стековый концентратор, кроме того, имеет специальный
порт для объединения нескольких таких концентраторов в единое устройство – стек
концентраторов. Как правило, в стеке участвует до 8 концентраторов (иногда больше).
Модульный концентратор состоит из общего шасси и подключаемых к нему модулей.
Разные модули могут иметь разное количество портов и поддерживать разные типы
физической среды. Как правило, подключение и отключение модуля не требует
выключения концентратора. Обычно модульные концентраторы снабжаются
дополнительным модулем SNMP-управления, резервными источниками питания и
устройствами вентиляции. Модульно-стековые концентраторы представляют собой
модульные концентраторы на небольшое количество модулей с дополнительным портом
для соединения их в стек.
Концентраторы могут иметь несколько внутренних шин, образуя несколько разделяемых
сегментов. Разные порты концентратора связываются (как правило, не аппаратно, а с
помощью программного управления) с разными сегментами. Сами сегменты никак друг с
другом не связываются. Такой концентратор называется многосегментным, его
способность программно назначать принадлежность портов к сегментам называется
конфигурационной коммутацией (configuration switching). Когда необходимо соединить
эти сегменты, применяют мосты, коммутаторы или маршрутизаторы. Развитием
многосегментных концентраторов стали коммутирующие концентраторы, имеющие
внутренний мост, связывающий сегменты.
Адресация:
Для эффективного управления сетью с общим доступом пользователи должны точно идентифицировать друг друга. Для этого используется цифровой адрес. В большинстве случаев сетевая плата компьютера имеет четко прописанный уникальный аппаратный МАС-адрес. Любой пакет данных содержит адрес этого компьютера и адрес целевого компьютера. Иногда протокол требует ТСР/IP адрес, кроме МАС. Кроме МАС-адресов компьютеры могут иметь адреса для операций уровня, отличного от аппаратного. Например протокол ТСР/IP требует, чтобы каждый компьютер имел кроме МАС-адреса индивидуальный адрес.
Коммутатор. Повторитель. Мост. Маршрутизатор
Для поддержания вычислительных сетей большого размера были разработаны специальные устройства, которые позволяли объединять 2 и более ЛВС и образовывать интерсети, позволяющие компьютерам одной сети взаимодействовать с компьютерами другой. Отдельные ЛВС могут быть связаны посредством использования различных типов устройств, одни из которых просто расширяют ЛВС, а другие непосредственно связаны с формированием интерсети.
Повторитель – полностью электронное устройство, которое увеличивает максимальную протяженность кабеля ЛВС путем усиления сигнала, проходящего через это устройство. Употребление повторителя с целью расширения сегмента сети не разделяет физически сеть на 2 ЛВС и не образует сетевого комплекса.
Мост – имеет функцию усиления сигнала как повторитель, но вместе с тем имеет способность избирательно отфильтровывать пакеты по их адресам. Пакеты приходящие на вход моста, подаются на выход только если они адресованы компьютеру находящемуся по другую сторону моста.. Поскольку мосты не препятствуют прохождению широкополосного вещания, то он не делит сеть на сегменты и не образует интерсеть.
Коммутатор – многопортовый повторитель, однако вместо работы на чисто электрическом уровне он считывает адрес назначения каждого входящего пакета и передает его только через тот порт с которым связан компьютер адресата. Коммутаторы могут взаимодействовать на разных уровнях, объединяя сети в сетевые комплексы.
Маршрутизатор – устройство – соединяющее различные ЛВС и формирующее интерсеть. Как и мост Маршрутизатор пропускает информацию для сегмента с которым соединен, однако в отличие от повторителей и мостов маршрутизатор препятствует прохождению широковещательного сообщения.
Глобальные сети. Операционные сети.
Интерсеть может объединить в себе ЛВС из отдаленных районов используя каналы связи глобальной сети.
Глобальная сеть – множество ЛВС, разделенных относительно большими расстояниями, и соединенных в различных точках. Типичная глобальная сеть включает в себя 2 маршрутизатора (по одному со стороны каждой глобальной сети) связанных между собой средствами удаленной связи (спутник, телефонная линия и т.д.) Каналы связи в глобальных сетях отличаются от соединения в ЛВС тем, что они не имеют общую среду передачи данных и могут быть вытянуты на значительные расстояния. Каждый компьютер одной глобальной сети может взаимодействовать с компьютером другой ЛВС, направляя информацию своему маршрутизатору, который передает её по назначению через линии связи глобальной сети.
Скорость передачи данных медленнее, чем в локальных сетях и использование глобальных сетей дороже.
Задача разработчиков сети – получение максимальной эффективности передачи информации по ГС путем удаления ненужной информации и выбора наилучшего типа соединения для коммуникационной программы.
Локальные сети называют LAN (Local Area Network). Это общепринятая аббревиатура.
Как правило, локальными сетями называют сети, соединяющие компьютеры в радиусе до
1—2 километров. Физической основой локальных сетей служат такие технологии, как, например, Fast Ethernet, обеспечивающий пропускную способность 100 Мбит/с, С1ёаЫ1 Егпегпе1 на 1000 Мбит/с или один из вариантов Wi-Fi. Все они достаточно универсальны для реализации различных сервисов, которые требуют большой пропускной способности сети. Что это за сервисы? Передача больших объемов информации за весьма умеренную плату или вовсе без таковой — если, например, сеть принадлежит какой-либо организации и используется для внутрипроизводственных нужд. Кроме того, локальные сети представляют собой благодатную среду для развития сетевых игр.
Но LAN при всей их универсальности обладают одним серьезным недостатком — и даже
не недостатком, а особенностью, которая на определенном этапе превращается в
недостаток. Заключается эта особенность в ограниченности расстояний. Для разных
технологий локальных сетей это разные цифры, но рано или поздно возникает
потребность в связи на больших расстояниях. «Чистые» локальные сети такую связь
осуществить не могут. Поэтому на сцену выходят глобальные сети, WAN (Wide Area Network). Есть еще некий Metropolian Area Network промежуточный вариант сети — сеть масштаба города — MAN.
MAN — высокоскоростная сеть, которая приближается по скоростям передачи данных к
локальным сетям, но прокладывается в масштабах городов и служит для связи городских
локальных сетей. Для обычных пользователей, то есть для нас с вами, интереснее
локальные сети. Но локальные сети сближаются с глобальными. Технологиям
сегодняшнего дня присуща конвергенция (взаимное проникновение), ну а случай с сетями
— самый яркий тому пример.
Конечно, технологии, применяемые для передачи данных в локальных и глобальных
сетях, различны. Если вы научитесь строить простые Ethernet-сети, то это не значит, что
вы сможете точно так же создать подобие глобальной сети. Но на общем уровне
тенденции их развития одинаковы.
Глобальные линии связи становятся все быстрее — и тут же распространяется
высокоскоростной доступ к глобальным сетям через локальные сети. К примеру,
локальная сеть предприятия соединяется с Интернетом посредством выделенной линии —
довольно быстрого соединения. В свою очередь, Интернет все чаще используют в
качестве среды для построения виртуальных сетей: сети центрального офиса и филиала
могут быть связаны воедино при помощи глобальной сети. Выросли скорости
магистральных каналов глобальных сетей — и мы тут же видим лавинообразное развитие
мультимедийных сервисов, да и сам WWW все больше ориентируется на
высокоскоростные линии связи. Локальные и глобальные сети в своем развитии
сталкиваются с одинаковыми проблемами. Возьмем, скажем, проблему безопасности
ей уделяют много внимания и в локальных, и в глобальных сетях.
Сетевая операционная система - Network operating system
Сетевая операционная система - операционная система, обеспечивающая обработку,
хранение и передачу данных в информационной сети. Сетевая операционная система
определяет взаимосвязанную группу протоколов верхних уровней, обеспечивающих
основные функции сети: адресацию объектов, функционирование служб, обеспечение
безопасности данных, управление сетью.
Сетевая операционная система составляет основу любой вычислительной сети. Каждый
компьютер в сети в значительной степени автономен, поэтому под сетевой операционной
системой в широком смысле понимается совокупность операционных систем отдельных
компьютеров, взаимодействующих с целью обмена сообщениями и разделения ресурсов
по единым правилам - протоколам. В узком смысле сетевая ОС - это операционная
система отдельного компьютера, обеспечивающая ему возможность работать в сети.
В сетевой операционной системе отдельной машины можно выделить несколько частей
(рисунок 1.1):
• Средства управления локальными ресурсами компьютера: функции распределения
оперативной памяти между процессами, планирования и диспетчеризации
процессов, управления процессорами в мультипроцессорных машинах, управления периферийными
устройствами и другие функции управления ресурсами локальных
ОС.
• Средства предоставления собственных ресурсов и услуг в общее пользование -
серверная часть ОС (сервер). Эти средства обеспечивают, например, блокировку
файлов и записей, что необходимо для их совместного использования; ведение
справочников имен сетевых ресурсов; обработку запросов удаленного доступа к
собственной файловой системе и базе данных; управление очередями запросов
удаленных пользователей к своим периферийным устройствам.
• Средства запроса доступа к удаленным ресурсам и услугам и их использования -
клиентская часть ОС (редиректор). Эта часть выполняет распознавание и
перенаправление в сеть запросов к удаленным ресурсам от приложений и
пользователей, при этом запрос поступает от приложения в локальной форме, а
передается в сеть в другой форме, соответствующей требованиям сервера.
Клиентская часть также осуществляет прием ответов от серверов и преобразование
их в локальный формат, так что для приложения выполнение локальных и
удаленных запросов неразличимо.
• Коммуникационные средства ОС, с помощью которых происходит обмен
сообщениями в сети. Эта часть обеспечивает адресацию и буферизацию
сообщений, выбор маршрута передачи сообщения по сети, надежность передачи и
т.п., то есть является средством транспортировки сообщений.
В зависимости от функций, возлагаемых на конкретный компьютер, в его операционной
системе может отсутствовать либо клиентская, либо серверная части.
Протоколы и стандарты.
Взаимодействие компьютеров в сети регламентируется протоколами т.е. формальными наборами правил и соглашений, определяющих каким способом устройства в сети обмениваются данными. Эти протоколы описывают любой момент времени действия от характеристик сигналов, передаваемых по кабелю, до языков запросов, позволяющих обмениваться сообщениями приложениям, исполняемым на разных компьютерах. Компьютеры сети используют множество протоколов, который называется стек. Интерфейс – физический уровень соединения в сетях.

В компьютерных сетях идеологической основой стандартизации является многоуровневый подход к разработке средств сетевого взаимодействия. Именно на основе этого подхода была разработана стандартная семиуровневая модель взаимодействия открытых систем, ставшая своего рода универсальным языком сетевых специалистов.
Для решения сложных задач используется универсальный прием - декомпозиция, то есть разбиение одной сложной задачи на несколько более простых задач-модулей см. рис.
 При
декомпозиции часто используют
многоуровневый подход. Он заключается
в следующем. Все множество модулей
разбивают на уровни. Уровни образуют
иерархию, то есть имеются вышележащие
и нижележащие уровни см. рис.
При
декомпозиции часто используют
многоуровневый подход. Он заключается
в следующем. Все множество модулей
разбивают на уровни. Уровни образуют
иерархию, то есть имеются вышележащие
и нижележащие уровни см. рис.
Интерфейс определяет набор функций, которые нижележащий уровень предоставляет вышележащему. В результате иерархической декомпозиции достигается относительная независимость уровней, а значит, и возможность их легкой замены.

Протоколом называются формализованные правила, определяющие последовательность и формат сообщений, которыми обмениваются сетевые компоненты, лежащие на одном уровне, но в разных узлах.
Модули, реализующие протоколы соседних уровней и находящиеся в одном узле, также взаимодействуют друг с другом в соответствии с четко определенными правилами и с помощью стандартизованных форматов сообщений. Эти правила принято называть интерфейсом.
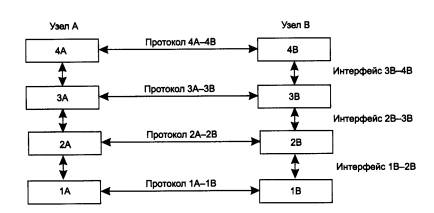
Линия связи (Interchange Circuit) - физическая среда, предназначенная для переноса информации между единицами оборудования, принимающими участие в информационном обмене, включая данные, сигналы управления и синхронизации.
Канал передачи данных (Data Transmission Channel) – совокупность физической среды и технических средств включая аппаратуру преобразования сигналов, вовлекаемых в процесс передачи информации между оборудованием системы связи.
Интерфейс (Interface) - средства сопряжения;соглашения, определяющие способ использования данного приложения другим приложением.
Протокол (Protocol) - набор правил, соглашений, сигналов, сообщений и процедур, регламентирующий взаимодействие между двумя устройствами ( в частности форматы, и процедуры обмена данными между ними).
Модель OSI.
Open System Interconnect Reference Model -
эталонная модель взаимодействия двух систем (компьютеров) через сеть.
Представляет собой некую парадигмы (теоретическое построение) которое разделяет взаимодействия в сети на 7 различных уровней.
Каждый уровень обслуживает свою часть процесса взаимодействия. Благодаря такой
структуре совместная работа сетевого оборудования и программного обеспечения
становится гораздо проще и прозрачнее.

Эталонная модель OSI, иногда называемая стеком OSI представляет собой 7-уровневую сетевую иерархию (рис.) разработанную Международной организацией по стандартам (International Standardization Organization - ISO). Эта модель содержит в себе по сути 2 различных модели:
горизонтальную модель на базе протоколов, обеспечивающую механизм взаимодействия программ и процессов на различных машинах
вертикальную модель на основе услуг, обеспечиваемых соседними уровнями друг другу на одной машине
В горизонтальной модели двум программам требуется общий протокол для обмена данными. В вертикальной - соседние уровни обмениваются данными с использованием интерфейсов API

Физический уровень модели OSI
Самый нижний уровень модели предназначен непосредственно для передачи потока
данных. Осуществляет передачу электрических или оптических сигналов в кабель или в
радиоэфир и, соответственно, их приём и преобразование в биты данных в соответствии с
методами кодирования цифровых сигналов. Другими словами, осуществляет интерфейс
между сетевым носителем и сетевым устройством.
На этом уровне работают концентраторы (хабы), повторители (ретрансляторы) сигнала и
медиаконверторы.
Функции физического уровня реализуются на всех устройствах, подключенных к сети. Со
стороны компьютера функции физического уровня выполняются сетевым адаптером или
последовательным портом. К физическому уровню относятся физические, электрические
и механические интерфейсы между двумя системами. Физический уровень определяет
такие свойства среды сети передачи данных как оптоволокно, витая пара, коаксиальный
кабель, спутниковый канал передач данных и т. п. Стандартными типами сетевых
интерфейсов, относящимися к физическому уровню, являются: V.35, RS-232C, RS-485,
RJ-11, RJ-45, разъемы AUI и BNC.
Механические и электрические/оптические свойства среды передачи определяются на физическом уровне и включаютя:
Тип кабелей и разъемов
Разводку контактов в разъемах
Схему кодирования сигналов для значений 0 и 1
К числу наиболее распространенных спецификаций физического уровня относятся:
EIA-RS-232-C, CCITT V.24/V.28 - механические/электрические характеристики несбалансированного последовательного интерфейса.
EIA-RS-422/449, CCITT V.10 - механические, электрические и оптические характеристики сбалансированного последовательного интерфейса.
IEEE 802.3 -- Ethernet
IEEE 802.5 -- Token ring
Среди сетевого оборудования физического уровня выделяется такой важный компонент как трансивер (обычно располагается на платах). Трансивер отвечает за передачу и прием сигналов из сетевой среды. В сетях использующих медный кабель трансивер это электрическое устройство, которое получает от протокола канального уровня двоичные данные и преобразует их в сигнал различного уровня напряжения. Физический уровень отличается от прочих тем, что содержимое передаваемой информации не имеет для него никакого значения. Трансивер просто преобразует нули и единицы в напряжение, свет, радиоволны и т.д. Не принимая во внимание существование пакетов адресов и так далее.
Сигналы вырабатываемые трансивером могут быть как аналоговыми, так и цифровыми. Аналоговые могут передаваться как изменением амплитуды, частоты, фазы или сочетанием этих элементов.
Цифровые сигналы применяются в сетевых технологиях более часто. Способ кодирования определяется конкретным протоколом канального уровня. В сети изернет используют манчестерскую систему кодирования, как для витой пары, так и для оптоволокна. Манчестерская система кодирования основана на самосинхронизации сигнала. Уровень сигнала изменяется по центру каждой ячейки. Это позволяет точно отметить границы ячейки для принимающей системы.
Канальный уровень модели OSI.
Этот уровень предназначен для обеспечения взаимодействия сетей на физическом уровне
и контроля за ошибками, которые могут возникнуть. Полученные с физического уровня
данные он упаковывает во фреймы, проверяет на целостность, если нужно исправляет
ошибки (посылает повторный запрос поврежденного кадра) и отправляет на сетевой
уровень. Канальный уровень может взаимодействовать с одним или несколькими
физическими уровнями, контролируя и управляя этим взаимодействием. Спецификация
IEEE 802 разделяет этот уровень на 2 подуровня — MAC (Media Access Control)
регулирует доступ к разделяемой физической среде, LLC (Logical Link Control)
обеспечивает обслуживание сетевого уровня.
На этом уровне работают коммутаторы, мосты.
В программировании этот уровень представляет драйвер сетевой платы, в операционных
системах имеется программный интерфейс взаимодействия канального и сетевого
уровней между собой, это не новый уровень, а просто реализация модели для конкретной
ОС. Примеры таких интерфейсов: ODI, NDIS
Канальный уровень обеспечивает создание, передачу и прием кадров данных. Этот уровень обслуживает запросы сетевого уровня и использует сервис физического уровня для приема и передачи пакетов. Спецификации IEEE 802.x делят канальный уровень на два подуровня: управление логическим каналом (LLC) и управление доступом к среде (MAC). LLC обеспечивает обслуживание сетевого уровня, а подуровень MAC регулирует доступ к разделяемой физической среде.
Наиболее часто используемые на уровне 2 протоколы включают:
HDLC для последовательных соединений
IEEE 802.2 LLC (тип I и тип II) обеспечивают MAC для сред 802.x
Ethernet
Token ring
FDDI
X.25
Frame relay
Адресация. Заголовок канального уровня содержит адрес компьютера отправившего пакет и адрес компьютера, который должен получить этот пакет. На этом уровне используется аппаратные МАС адреса, которые в большинстве случаев зашиты в микросхему платы сетевого адаптора.
Сетевой уровень модели OSI.
(англ. Network layer). Третий уровень сетевой модели OSI предназначен для определения пути передачи данных. Отвечает за трансляцию логических адресов и имён в физические, определение кратчайших маршрутов, коммутацию и маршрутизацию, отслеживание неполадок и заторов в сети. На этом уровне работает такое сетевое устройство, как маршрутизатор. Протоколы сетевого уровня маршрутизируют данные от источника к получателю. Сетевой уровень отвечает за деление пользователей на группы. На этом уровне происходит маршрутизация пакетов на основе преобразования MAC-адресов в сетевые адреса. Сетевой уровень обеспечивает также прозрачную передачу пакетов на транспортный уровень.
Наиболее часто на сетевом уровне используются протоколы:
IP - протокол Internet
IPX - протокол межсетевого обмена
X.25 (частично этот протокол реализован на уровне 2)
CLNP - сетевой протокол без организации соединений
Транспортный уровень модели OSI.
4-й уровень модели предназначен для доставки данных без ошибок, потерь и
дублирования в той последовательности, как они были переданы. При этом не важно,
какие данные передаются, откуда и куда, то есть он предоставляет сам механизм передачи. Блоки данных он разделяет на фрагменты, размер которых зависит от
протокола, короткие объединяет в один, а длинные разбивает. Пример: TCP, UDP.
Существует множество классов протоколов транспортного уровня, начиная от
протоколов, предоставляющих только основные транспортные функции (например,
функции передачи данных без подтверждения приема), и заканчивая протоколами,
которые гарантируют доставку в пункт назначения нескольких пакетов данных в
надлежащей последовательности, мультиплексируют несколько потоков данных,
обеспечивают механизм управления потоками данных и гарантируют достоверность
принятых данных.
Некоторые протоколы сетевого уровня, называемые протоколами без установки
соединения, не гарантируют, что данные доставляются по назначению в том порядке, в
котором они были посланы устройством-источником. Некоторые транспортные уровни
справляются с этим, собирая данные в нужной последовательности до передачи их на
сеансовый уровень. Мультиплексирование (multiplexing) данных означает, что
транспортный уровень способен одновременно обрабатывать несколько потоков данных
(потоки могут поступать и от различных приложений) между двумя системами. Механизм
управления потоком данных — это механизм, позволяющий регулировать количество
данных, передаваемых от одной системы к другой. Протоколы транспортного уровня
часто имеют функцию контроля доставки данных, заставляя принимающую данные
систему отправлять подтверждения передающей стороне о приеме данных.
Описать работу протоколов с установкой соединения можно на примере работы обычного
телефона. Протоколы этого класса начинают передачу данных с вызова или установки
маршрута следования пакетов от источника к получателю. После чего начинают
последовательную передачу данных и затем по окончании передачи разрывают связь.
Протоколы без установки соединения, которые посылают данные, содержащие полную
адресную информацию в каждом пакете, работают аналогично почтовой системе. Каждое
письмо или пакет содержит адрес отправителя и получателя. Далее каждый
промежуточный почтамт или сетевое устройство считывает адресную информацию и
принимает решение о маршрутизации данных. Письмо или пакет данных передается от
одного промежуточного устройства к другому до тех пор, пока не будет доставлено
получателю. Протоколы без установки соединения не гарантируют поступление
информации получателю в том порядке, в котором она была отправлена. За установку
данных в соответствующем порядке при использовании сетевых протоколов без
установки соединения отвечают транспортные протоколы.
Транспортный уровень делит потоки информации на достаточно малые фрагменты (пакеты) для передачи их на сетевой уровень.
Наиболее распространенные протоколы транспортного уровня включают:
TCP - протокол управления передачей
NCP - Netware Core Protocol
SPX - упорядоченный обмен пакетами
TP4 - протокол передачи класса 4
Сеансовый уровень модели OSI.
5-й уровень модели отвечает за поддержание сеанса связи, позволяя приложениям
взаимодействовать между собой длительное время. Уровень управляет
созданием/завершением сеанса, обменом информацией, синхронизацией задач,
определением права на передачу данных и поддержанием сеанса в периоды неактивности
приложений. Синхронизация передачи обеспечивается помещением в поток данных
контрольных точек, начиная с которых возобновляется процесс при нарушении
взаимодействия.
Сеансовый уровень отвечает за организацию сеансов обмена данными между оконечными машинами. Протоколы сеансового уровня обычно являются составной частью функций трех верхних уровней модели.
Представительский уровень модели OSI.
Представительский (Уровень представления) (англ. Presentation layer)
Этот уровень отвечает за преобразование протоколов и кодирование/декодирование
данных. Запросы приложений, полученные с уровня приложений, он преобразует в
формат для передачи по сети, а полученные из сети данные преобразует в формат,
понятный приложениям. На этом уровне может осуществляться сжатие/распаковка или
кодирование/декодирование данных, а также перенаправление запросов другому сетевому
ресурсу, если они не могут быть обработаны локально.
Уровень 6 (представлений) эталонной модели OSI обычно представляет собой
промежуточный протокол для преобразования информации из соседних уровней. Это
позволяет осуществлять обмен между приложениями на разнородных компьютерных
системах прозрачным для приложений образом. Уровень представлений обеспечивает
форматирование и преобразование кода. Форматирование кода используется для того,
чтобы гарантировать приложению поступление информации для обработки, которая
имела бы для него смысл. При необходимости этот уровень может выполнять перевод из
одного формата данных в другой. Уровень представлений имеет дело не только с
форматами и представлением данных, он также занимается структурами данных, которые
используются программами. Таким образом, уровень 6 обеспечивает организацию данных
при их пересылке. Чтобы понять, как это работает, представим, что имеются две системы. Одна использует для представления данных расширенный двоичный код обмена иформацией EBCDIC, например, это может быть мэйнфрейм компании IBM, а другая — американский стандартный код обмена информацией ASCII (его используют большинство других производителей компьютеров). Если этим двум системам необходимо обменяться
информацией, то нужен уровень представлений, который выполнит преобразование и
осуществит перевод между двумя различными форматами.
Другой функцией, выполняемой на уровне представлений, является шифрование данных,
которое применяется в тех случаях, когда необходимо защитить передаваемую
информацию от приема несанкционированными получателями. Чтобы решить эту задачу,
процессы и коды, находящиеся на уровне представлений, должны выполнить
преобразование данных. На этом уровне существуют и другие подпрограммы, которые
сжимают тексты и преобразовывают графические изображения в битовые потоки, так что
они могут передаваться по сети.
Стандарты уровня представлений также определяют способы представления графических
изображений. Для этих целей может использоваться формат PICT — формат
изображений, применяемый для передачи графики QuickDraw между программами для
компьютеров Macintosh и PowerPC. Другим форматом представлений является
тэгированный формат файлов изображений TIFF, который обычно используется для
растровых изображений с высоким разрешением. Следующим стандартом уровня
представлений, который может использоваться для графических изображений, является
стандарт, разработанный Объединенной экспертной группой по фотографии (Joint
Photographic Expert Group); в повседневном пользовании этот стандарт называют просто
JPEG.
Существует другая группа стандартов уровня представлений, которая определяет
представление звука и кинофрагментов. Сюда входят интерфейс электронных
музыкальных инструментов MIDI (Musical Instrument Digital Interface) для цифрового
представления музыки, разработанный Экспертной группой по кинематографии стандарт
MPEG, используемый для сжатия и кодирования видеороликов на компакт-дисках,
хранения в оцифрованном виде и передачи со скоростями до 1,5 Мбит/с, и QuickTime —
стандарт, описывающий звуковые и видео элементы для программ, выполняемых на
компьютерах Macintosh и PowerPC.
Уровень представления отвечает за возможность диалога между приложениями на разных машинах. Этот уровень обеспечивает преобразование данных (кодирование, компрессия и т.п.) прикладного уровня в поток информации для транспортного уровня. Протоколы уровня представления обычно являются составной частью функций трех верхних уровней модели.
Прикладной уровень модели OSI.
Верхний (7-й) уровень модели, обеспечивает взаимодействие сети и пользователя.
Уровень разрешает приложениям пользователя иметь доступ к сетевым службам, таким
как обработчик запросов к базам данных, доступ к файлам, пересылке электронной почты.
Также отвечает за передачу служебной информации, предоставляет приложениям
информацию об ошибках и формирует запросы к уровню представления. Пример: HTTP,
POP3, SMTP, FTP.
Прикладной уровень отвечает за доступ приложений в сеть. Задачами этого уровня является перенос файлов, обмен почтовыми сообщениями и управление сетью.
К числу наиболее распространенных протоколов верхних уровней относятся:
FTP - протокол переноса файлов
TFTP - упрощенный протокол переноса файлов
X.400 - электронная почта
Telnet
SMTP - простой протокол почтового обмена
CMIP - общий протокол управления информацией
SNMP - простой протокол управления сетью
NFS - сетевая файловая система
FTAM - метод доступа для переноса файлов
Промышленные интерфейсы и протоколы.
Интерфейсы. Основные понятия.
Модель ЕРА – архитектура расширенного исполнения. На ней построено взаимодействие почти всех протоколов. Включает: Уровень приложения –организация обмена лданными между прикладными процессами, Уровень связи. И Физический уровень.
Интерфейс (Interface) - средства сопряжения;
соглашения, определяющие способ использования данного приложения другим приложением.
Протокол (Protocol) - набор правил, соглашений, сигналов, сообщений и процедур, регламентирующий взаимодействие между двумя устройствами ( в частности форматы, и процедуры обмена данными между ними).
Линия связи (Interchange Circuit) - физическая среда, предназначенная для переноса информации между единицами оборудования, принимающими участие в информационном обмене, включая данные, сигналы управления и синхронизации.
Канал передачи данных (Data Transmission Channel) – совокупность физической среды и технических средств включая аппаратуру преобразования сигналов, вовлекаемых в процесс передачи информации между оборудованием системы связи.
Формирователь (Driver) – электронная цепь или контакт реле (источник) на передающей стороне линии связи, посредством которых осуществляется передача двоичных цифровых сигналов в оконечную нагрузку по соединительному кабелю;
- передатчик двоичных цифровых сигналов.
Оконечная нагрузка (Terminator) – электронная цепь (потребитель) на приемной стороне цепи обмена, посредством которой осуществляется прием двоичных цифровых сигналов от формирователя по соединительному кабелю;
- приемник двоичных сигналов.




Интерфейс RS232.
Последовательный интерфейс RS-232 - широко используемый в компьютерной технике, промышленной автоматизации для синхронной и асинхронной передачи данных, определяемый стандартом EIA RS-232-C и рекомендациями V.24 CCITT. Изначально создавался для связи компьютера с терминалом. В настоящее время используется в самых различных применениях. Интерфейс RS-232-C соединяет только два устройства и это его недостаток, как и небольшая максимальная протяженность линии (12м). Линия передачи первого устройства соединяется с линией приема второго и наоборот (полный дуплекс) Для управления соединенными устройствами используется программное подтверждение (введение в поток передаваемых данных соответствующих управляющих символов). Возможна организация аппаратного подтверждения путем организации дополнительных RS-232 линий для обеспечения функций определения статуса и управления.
Стандарт описывает управляющие сигналы интерфейса, пересылку данных, электрический интерфейс и типы разъемов. В стандарте предусмотрены асинхронный и синхронный режимы обмена, но COM-порты поддерживают только асинхронный режим. Функционально RS-232C эквивалентен стандарту МККТТ V.24/ V.28 и стыку С2, но они имеют различные названия сигналов.

Стандарт EIA RS - 232C, CCITT V.24
Скорость передачи 115 Кбит/с (максимум)
Расстояние передачи 15 м (максимум)
Характер сигнала несимметричный по напряжению
Количество драйверов 1
Количество приемников 1
Схема соединения полный дуплекс, от точки к точке
Назначение выводов:
FG - защитное заземление (экран)
TxD - данные, передаваемые компьютером в последовательном коде (логика отрицательная)
RxD - данные, принимаемые компьютером в последовательном коде (логика отрицательная)
RTS - сигнал запроса передачи. Активен во все время передачи CTS - сигнал сброса (очистки) для передачи. Активен во все время передачи. Говорит о готовности приемника DSR - готовность данных. Используется для задания режима модема. SG - сигнальное заземление, нулевой провод DCD - обнаружение несущей данных (детектирование принимаемого сигнала) DTR - готовность выходных данных RI - индикатор вызова. Говорит о приеме модемом сигнала вызова по телефонной сети



Интерфейс RS485
Интерфейс RS-485 - широко распространенный высокоскоростной и помехоустойчивый промышленный последовательный интерфейс передачи данных. Практически все современные компьютеры в промышленном исполнении, большинство интеллектуальных датчиков и исполнительных устройств, программируемые логические контроллеры наряду с традиционным интерфейсом RS-232 содержат в своем составе ту или иную реализацию интерфейса RS-485.
Интерфейс RS-485 обеспечивает обмен данными между несколькими устройствами по одной двухпроводной линии связи в полудуплексном режиме. Широко используется в промышленности при создании АСУ ТП.
Скорость и дальность
RS-485 обеспечивает передачу данных со скоростью до 10 Мбит/с. Максимальная дальность зависит от скорости: при скорости 10 Мбит/с максимальная длина линии — 120 м, при скорости 100 кбит/с — 1200 м.
Количество соединяемых устройств
Количество устройств, подключаемых к одной линии интерфейса, зависит от типа примененных в устройстве приемопередатчиков. Один передатчик рассчитан на управление 32 стандартными приемниками. Выпускаются приемники со входным сопротивлением 1/2, 1/4, 1/8 от стандартного. При использовании таких приемников общее число устройств может быть увеличено соответственно: 64, 128 или 256.
Протоколы и разъемы
Стандарт не нормирует формат информационных кадров и протокол обмена. Наиболее часто для передачи байтов данных используются те же фреймы, что и в интерфейсе RS-232: стартовый бит, биты данных, бит паритета (если нужно), стоповый бит.
Протоколы обмена в большинстве систем работают по принципу "ведущий"-"ведомый". Одно устройство на магистрали является ведущим (master) и инициирует обмен посылкой запросов подчиненным устройствам (slave), которые различаются логическими адресами. Одним из популярных протоколов является протокол Modbus RTU.
Тип соединителей и распайка также не оговариваются стандартом. Встречаются соединители DB9, клеммные соединители и т.д.
Схема подключения
|

На рисунке изображена локальная сеть на основе интерфейса RS-485, объединяющая несколько приемо-передатчиков.
При подключении следует правильно присоединить сигнальные цепи, обычно называемые А и В. Переполюсовка не страшна, но устройство работать не будет.