

14. Операционные усилители
14.1. Общие положения.
По принципу действия ОУ сходен с обычным усилителем, т.е. он предназначен для усиления мощности или тока, однако если свойства и параметры обычного усилителя определяются свойствами и параметрами составляющих элементов и его схемой, то свойства и параметры усилителя, собранного на ОУ определяются только свойствами цепей ОС.
Основные свойства и требования к ОУ:
ОУ должен быть пригоден к усилению постоянного тока.
У ОУ должны быть нулевые входные и выходные напряжения при отсутствии сигнала.
В ОУ должно быть высокое входное и низкое выходное сопротивления.
У ОУ должна быть обеспечена стандартная частотная характеристика.
ОУ должен обладать большим коэффициентом усиления.
Подобные высококачественные усилители раньше применялись только в аналоговых вычислительных устройствах для реализации различных математических операций.
15. Принципы управления двигателем след. Св-ва п/п приб.
15.1 Режимы целесообразного управления по цепи якоря.
В установившемся режиме работы:
![]()
![]()
Рис. 15.1. Электрическая
схема управления по цепи якоря
а)
б)
Рис. 15.2. Временные
диаграммы а)
по току б)
по напряжению
![]()
Механическая характеристика:
Т.е справедливо только для таких Мвр, при которых сохраняется режим непрерывного тока
Изменить
![]() можно:
1) Широтно – импульсное управление
изменнением t1,
ty
= const
следовательно
можно:
1) Широтно – импульсное управление
изменнением t1,
ty
= const
следовательно
![]()
2) Частотно – имп. упр. ty
Если I успевает за t2 достичь нуля, то характеристики теряют жёсткость.
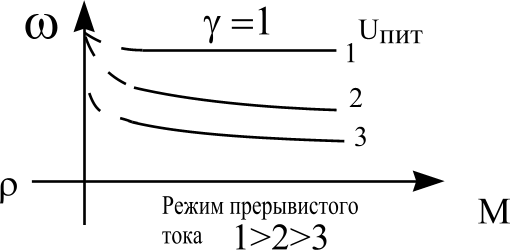
Рис. 15.3. Характеристика
импульсного преобразователя
 Тиристорный
широтно–импульсный преобразователь
с параллельной коммутацией
Тиристорный
широтно–импульсный преобразователь
с параллельной коммутацией

Роль
ЭДС коммут. игр.
Uс
U
Рис. 15.4. Схема преобразователя
с
Рис. 15.5. Управление двигателем с помощью тиристора
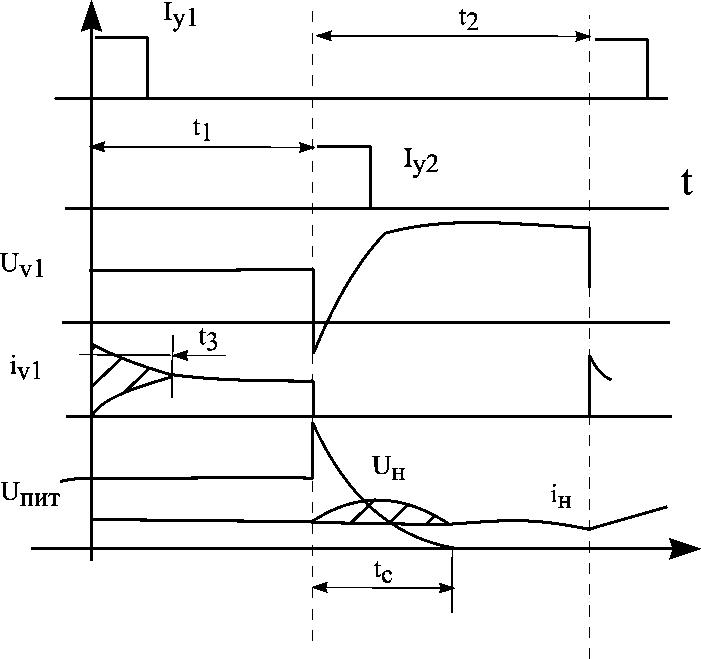
Рис. 15.6. Временные
диаграммы
Ср. больше следовательно механическая характеристика лежит выше. Уменьшается жёсткость механической характеристики.
2. Диапазон регулирования ограничен снизу t1 < tз
15.2 Широтно – импульсный преобразователь
ek
> Uпит
Рис. 15.7. Электрическая
схема широтно-импульсного преобразователя
Рис. 15.8. Дополненная
электрическая схема широтно-импульсного
преобразователя
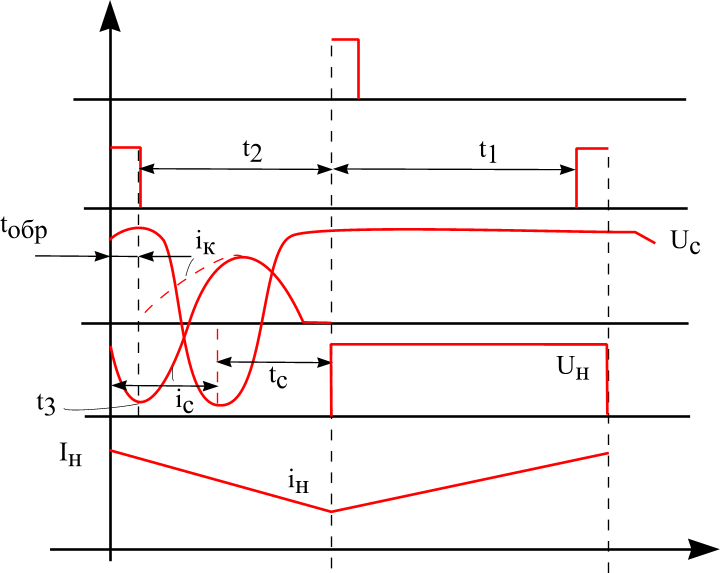
Рис. 15.9. Временные
диаграммы широтно-импульсного
преобразователя
t=0:
Iнач
(С – L1)
– колебательный контур после открытия
V2
начальный
ток = Iн
При этом Uк=
Uc
– Uпит
Параметры
подбираются так, чтобы tобр
: Uc>
Uпит
было достаточно для надежного закорачивания
и когда Uc
< Uк
диод Dk
откроется
и начнёт течь ток ikпройдя
через ноль изменит свою полярность.
Т.е после этого через V2
потечет
ток = ik-
iс
когда ач стало = ik=
iс
тиристор
V2
закроется ток конд. проек. по цепи ком
до тех пор пока = 0 следовательно, Dk
закроется, а конденсатор зарядится до
Uc
, сохраняя
заряд до конца временного цикла. Нагрузка
отключится и от ист. пит. и от цепи ком.
следовательно отсутствует приток
энергии следовательно Ucр
определяется
только
![]() Механические хар-ки будут лежать ниже
и более жестко tз
вх f2
.
Механические хар-ки будут лежать ниже
и более жестко tз
вх f2
. Процесс заряда и разр – С зависит от
тока нагрузки следовательно max
Uc
с током нагрузки следовательно обеспечив
большую нагрузку Способность устойчивой
работы при люб. токах нагрузки.
Процесс заряда и разр – С зависит от
тока нагрузки следовательно max
Uc
с током нагрузки следовательно обеспечив
большую нагрузку Способность устойчивой
работы при люб. токах нагрузки.
1. Преобразование частоты с непосредственной связью первой и второй цепей;
2. Со звеном постоянного тока.
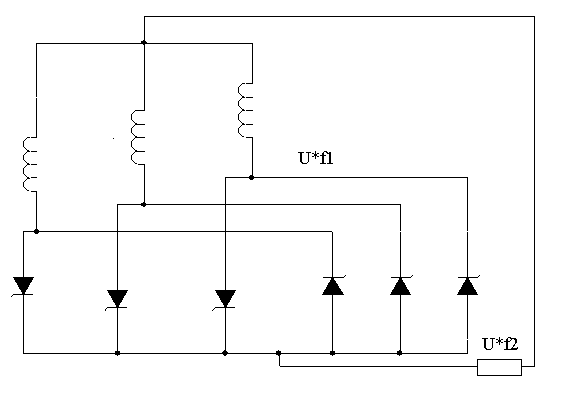
Рис.15.10. Схема со звеном постоянного тока
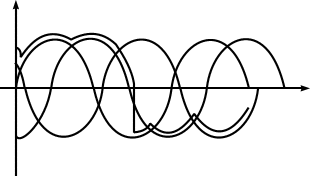
Рис.15.11. Временные характеристики схемы со звеном постоянного тока
Преобразование частоты со звеном постоянного тока.
Схема имеет два независимых канала управления по f и по U.

Рис.15.12. Структурная схема схемы со звеном постоянного тока
16. Инвертор
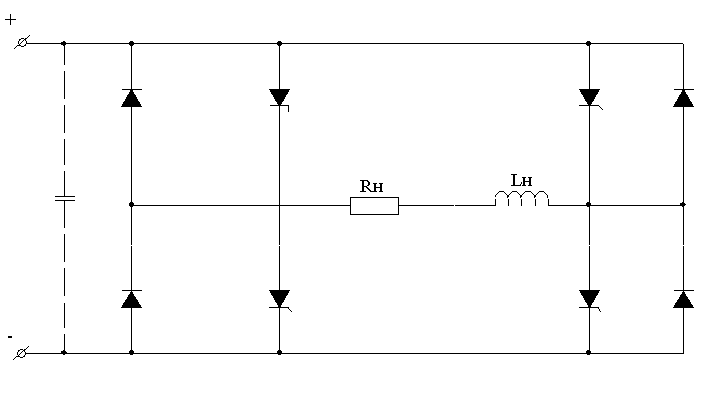
Рис.16.1. Схема однофазного мостового инвертора
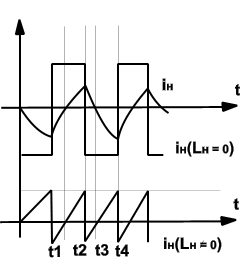
Рис.16.2. Временные диаграммы инвертора
Входной ток становится знакопеременным => следовательно изменяется энергообмен выпрямления, то для создания обратной проводимости его шунтируют конденсатором.
17. Датчики
1. Непосредственное;
2. Последовательное преобразование.
Типы датчиков различаются по входной величине:
1. Механические;
2. Электрические;
3. Гидравлические;
4. Пневматические;
5. Оптические;
6. Акустические;
7. Радиоволновые;
8. Ядерные.
17.1 Электрические датчики
Рис.17.1. Схема электрического датчика
2 варианта подключения
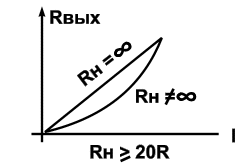
Рис.17.2. Линейные потенциометры
ТГ: E = kФ, Ф = const – с постоянным или электромагнитным возбуждением.
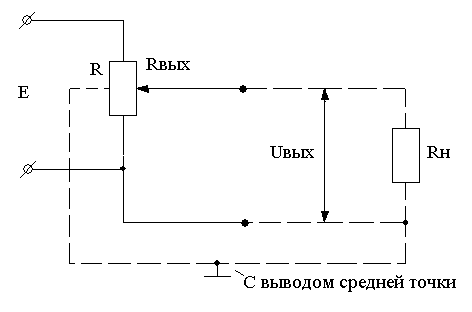
Рис.17.3. С выводом средней точки
ТГ тока: Синхронные и асинхронные.
17.2 Сельсины датчики

Рис.17.4. Сельсины датчики
Если ось однофазной обмотки перпендикулярна Ф, то Q = 0, Е = 0 Um = sin(Q) фаза Uвых – знак поворота амплитуды.
17.3 Вращающие трансформаторы
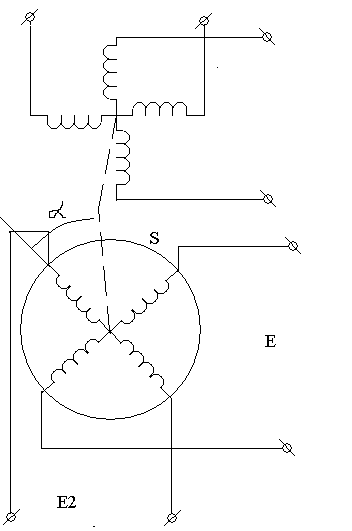
Рис.17.5. Вращающий трансформатор
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
17.4 Цифровые датчики
1. Датчики абсолютного значения;
2. Датчики накапливаемого типа.
Основные технические характеристики цифровых датчиков:
1. Диапазон преобразования угла;
2. Число двоичных разрядов;
3. Способ представления выходного числа;
4. Частота опроса;
5. Статическая и динамическая точность преобразований.
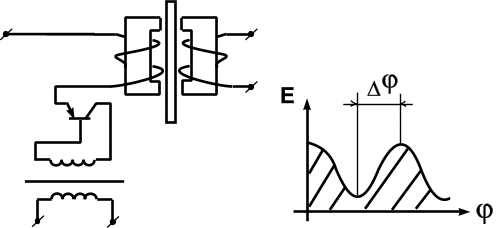
Рис.17.6.Функциональная схема цифрового датчика
18. Автоматизированный электропривод
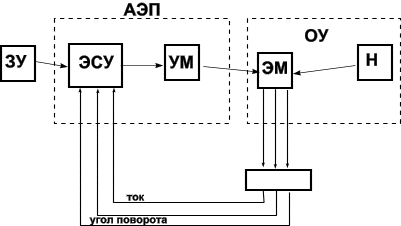
Рис.18.1. Схема управления автоматизированного электропривода
18.1 Управляемый выпрямитель
![]()
Рис.18.2. Структурная схема автоматического управления электроприводом

Рис.18.3. Схема однополупериодного управляемого выпрямителя

Рис.18.4. Временные диаграммы работы однополупериодного управляемого выпрямителя
![]() ;
;
![]() Возможно меньшей tимп,
но большей tвкл.
тиристора.
Возможно меньшей tимп,
но большей tвкл.
тиристора.
![]() .
.
Крутой фронт управления => потерь в тиристоре нет.
18.1.1 Характеристики управления
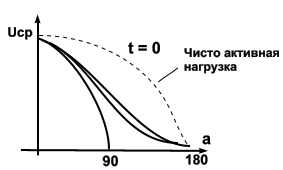
Рис.18.5. Зависимость Uср()
![]()
Вышерассмотренная схема носит активно – индуктивный характер.
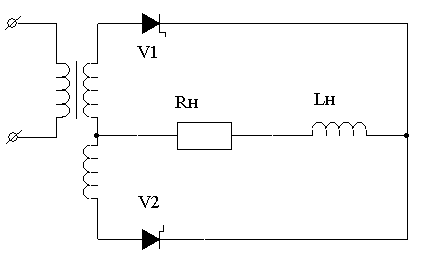
Рис.18.6. Схема с активно – индуктивным характером
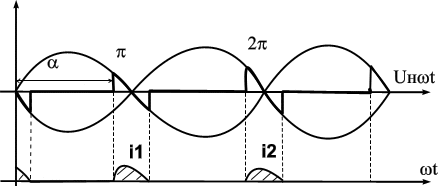
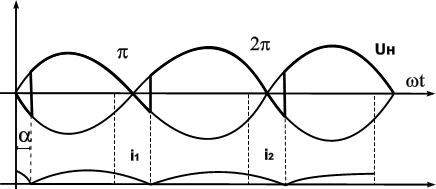
Рис.18.7. Временные диаграммы схемы с активно – индуктивным характером
![]() ;
;
![]() -
режим непрерывного тока.
-
режим непрерывного тока.
Постоянная
составляющая тока определяет вращающий
момент двигателя. Переменная составляющая
зависит от способности схемы сглаживать
пульсации возрастающие
при прерывистом токе. Для создания
режима непрерывного тока в двигателе
используют дополнительный дроссель
![]() и
и
![]() возрастает электромеханическая
постоянная следовательно ухудшаются
динамические свойства двигателя.
возрастает электромеханическая
постоянная следовательно ухудшаются
динамические свойства двигателя.
Непрерывность
тока сохраняется при
![]()
![]() .
.
![]() .
.
Т.
о. эффективное регулирование возможно
![]() .
.