

2.5 Расчеты в автоматизированных системах управления
2.5.1 Исследование устойчивости системы
При проектировании и эксплуатации систем управления одним из основных требований, предъявляемых к ним, является требование устойчивости системы.
Система автоматического управления считается устойчивой, если она, будучи выведена из состояния установившегося движения некоторым воздействием, возвращается в исходное состояние после прекращения этого воздействия.
Найдем передаточные функции всех звеньев:
1. Передаточная функция объекта управления:
W1(р)=Ко*е-рt/То*Р+1; где К0- коэффициент объекта (из разгонной характеристики)
То=150 - (из разгонной характеристики) постоянная времени.
W1(р)=Ко*е-рt/То*Р+1=1,2/10р+1;
2. Передаточная функция регулирующего органа:
W2(Р)=К2=4
3. Передаточная функция исполнительного механизма:
W3(Р)=1/Т3*р; где Т3=0,1p
W3(Р)=1/Т3*р=1-0,1р
4. Передаточная функция ПБР:
 W4(Р)=К4=1
W4(Р)=К4=1
5. Передаточная функция П-регулятора:
W5(Р)=К5=60
где К5- коэффициент усиления регулятора
К5=0,7/К0*t/Т0=0,7/20*0,5=0,07
6. Передаточная функция И-регулятора:
W6(Р)=1/Т6*Р=1/7р,
где Т6-время изодрома
Т6=0,3-Т0=45с
7. Передаточная функция:
W7(Р)=К7=200
8. Передаточная функция датчика) wд
Wд(Р)=Кд/Тд*Р+1;
где Кд-коэффициент датчика, который находится по формуле:
Кд=900/0,5mА=180, а инерционность датчика Тд=0,06с.
Нахождение передаточной функции замкнутой системы, через соединения звеньев.
W11(р)= W4(р)*W3(р)=1/0,1р;
W12(р)=К4*1/Т3*Р/1+К4*1/Т3*Р*К7=1/0,1р/1+1/0,1р*200=
=0,1р/0,01р2+20р=1/0,1+200;
W13=W5(р)+W6(р)=60+1/7p=420p;
W14(р)=W13(р)*W2(р)*W1(р)*W13(р)=W12(р)*W2(p)*W1(р)*(W5(р)+W6(р))=
=1*3*18*(3,15р+1)/(0,1р+200)*(130р+1)45р=
=76*(3,15р+1)/(16р2+0,1р+28000р+200)45р=
=3,15р+1/(15р230000,1р+200)*1,8р=
=3,15р+1/25р3+52000р2+330р;
Wзам(р)=W14/1+W14*Wд=3,15р+1/25р3+52000р2+330р/1+
+(3,15р+1)*200/(25р3+52000р2+330р)*(0,05р+1)= =(3,15р+1)*(25р3+52000р2+330р)*(0,05р+1)/(25р3+52000р2+
+330р)*[(27р3+52000р2+330р)*(0.05+1)+200(3.15р+1)]=
=0,14р2+3,15р+0,05р+1/1,34р4+27р3+2680р3+52000р2+18р2+330р+
+620р+200=0,14р2+3,2р+1/1,34р4+2650р3+52231р2+860р+200;
Критерий Рауса-Гурвица
Характеристическое уравнение:
1,34р4+2650р3+52231р2+860р+200=0
р4+2001р3+39023.6р2+687.4р+148,2=0
 По
Гурвицу система является устойчивой,
так как выполняется следующие условие:
По
Гурвицу система является устойчивой,
так как выполняется следующие условие:
а1*а2*а3.>а0*а32+а12*а4
5,36*1010>5.3*108
Критерий Михайлова.
Знаменатель
 составит
характеристическое уравнение.
составит
характеристическое уравнение.Заменим в характеристическом уравнении заменим P на (jw), помня, что
 получим:
получим:
w4-2001 jw3-39023.6w2+687.4 jw+148,2=0
Разделим это уравнение на действительную и мнимую части:
Re(w)=w4-39023.6w2+148,2
Im(w)=687.4jw-2001jw3
Задаваясь различными частотами составим таблицу.
W |
0 |
1 |
2 |
3 |
|
Re |
148,2 |
-3,7*104 |
-1,48*105 |
-3,1*105 |
|
Im |
0 |
-1,0*103 |
-1,35*104 |
-4,8*104 |
|
Соединим все точки в порядке возрастания w построим график.
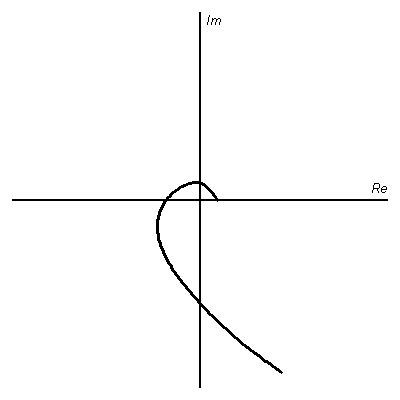
Вывод:
система устойчива так как характеристический
вектор при изменении частоты от 0 до
 повернулся в положительном направлении
на число квадрантов, равное порядку
исходного уравнения.
повернулся в положительном направлении
на число квадрантов, равное порядку
исходного уравнения.