

1/1 Механика – это часть физики, изучающая механическое движение материальных тел и происходящие при этом взаимодействия между ними. Под механическим движением понимают изменение с течением времени взаимного положения тел или их частиц в пространстве. В природе – это движение небесных тел, колебания земной коры, воздушные и водные течения и т.п.; в технике – движения различных летательных аппаратов и транспортных средств, частей двигателей, машин и механизмов, деформации элементов различных конструкций и сооружений, движения жидкостей и газов и многое другое. Классическая механика делится на три раздела: кинематику, динамику. Кинематика изучает движение тел, не рассматривая причины, которые это движение обусловливают (т.е. движение тел без учета их масс и действующих на них сил). Методы и зависимости, устанавливаемые в кинематике, используются при расчетах передач движения в различных механизмах и машинах, а также при решении задач динамики. Динамика изучает движение материальных тел под действием приложенных к ним сил. В основе динамики лежат законы механики Ньютона, из которых получаются все уравнения и теоремы, необходимые для решения задач динамики.
1/3 Простра́нство-вре́мя — физическая модель, дополняющаяпространство равноправным[1] временны́м измерением и, таким образом, создающая теоретико-физическую конструкцию, которая называется пространственно-временным континуумом.
В соответствии с теорией относительности, Вселенная имеет три пространственных измерения и одно временное измерение, и все четыре измерения органически связаны в единое целое, являясь почти равноправными и в определенных рамках (см. примечания ниже) способными переходить друг в друга при смене наблюдателем системы отсчёта.
В рамках общей теории относительности пространство-время имеет и единую динамическую природу, а его взаимодействие со всеми остальными физическими объектами (телами, полями) — и есть гравитация. Таким образом, теория гравитации в рамках ОТО и других метрических теорий гравитации есть теория пространства-времени, полагаемого не плоским, а способным динамически менять свою кривизну.
1/4 Движение тел можно описывать в различных системах отсчета. С точки зрения кинематики все системы отсчета равноправны. Однако кинематические характеристики движения, такие как траектория, перемещение, скорость, в разных системах оказываются различными. Величины, зависящие от выбора системы отсчета, в которой производится их измерение, называют относительными.
1/5 Система отсчёта в механике, совокупность системы координат и часов, связанных с телом, по отношению к которому изучается движение (или равновесие) каких-нибудь других материальных точек или тел. Любое движение является относительным, и движение тела следует рассматривать лишь по отношению к какому-либо другому телу (телу отсчёта) или системе тел
Математически движение тела (или материальной точки) по отношению к выбранной С. о. описывается уравнениями, которые устанавливают, как изменяются с течением времени t координаты, определяющие положение тела (точки) в этой С. о. Например, в декартовых координатах х, у, zдвижение точки определяется уравнениями x = f1(t), у = f2(t), z = f3(t), которые называются уравнениями движения.
Выбор С. о. зависит от целей исследования. При кинематических исследованиях все С. о. равноправны. В задачах динамики преимущественную роль играют инерциальные системы отсчёта, по отношению к которым дифференциальные уравнения движения имеют обычно более простой вид.
1/10
Угловая
скорость равномерного
вращения (ω) есть величина, измеряемая
углом поворота за единицу времени: ![]() где
ω
– угол поворота за время t,
измеряемый в радианах (рад).Угловая
скорость может быть выражена через
число оборотов в единице времени n или
период обращения T:
где
ω
– угол поворота за время t,
измеряемый в радианах (рад).Угловая
скорость может быть выражена через
число оборотов в единице времени n или
период обращения T: ![]()
![]() Линейной
скоростью точки во вращательном движении
называется мгновенная скорость движущейся
точки. Вектор скорости направлен по
касательной к траектории. Угловая
скорость ω связана с линейной
скоростью v:
Линейной
скоростью точки во вращательном движении
называется мгновенная скорость движущейся
точки. Вектор скорости направлен по
касательной к траектории. Угловая
скорость ω связана с линейной
скоростью v: ![]() где
R –
расстояние от точки до оси вращения.
где
R –
расстояние от точки до оси вращения.
В случае
неравномерного вращательного движения
различают мгновенную и среднюю угловые
скорости. Если за время от момента t0 до
момента t0+Δt тело
повернулось на угол Δψ, то средней
угловой скоростью (ωср)
за промежуток времени Δt называется
отношение ![]()
Предел
этого отношения есть, по определению,
мгновенная угловая скорость в момент
времени t0: ![]()
Вращение, при котором за любые равные промежутки времени угловая скорость изменяется на одну и ту же величину, называется равнопеременным.
Угловым
ускорением равнопеременного
вращения ε называется величина, измеряемая
изменением угловой скорости в единицу
времени; точнее ![]() где ωt –
угловая скорость в момент времени t;
ω0 –
угловая скорость в момент начала отсчета
времени t0.
где ωt –
угловая скорость в момент времени t;
ω0 –
угловая скорость в момент начала отсчета
времени t0.
Угловая скорость ω и угловое ускорение ε – величины векторные; направление вектора ω определяется по правилу правого винта (рис.1): если головку винта вращать по направлению вращения тела, то поступательное движение винта будет совпадать с направлением ω; вектор ω направлен вдоль оси вращения. Направление вектора углового ускорения совпадает с направлением ω, если угловая скорость увеличивается; при уменьшении угловой скорости направление вектора ε противоположно направлению ω.
Если
равнопеременное вращательное движение
характеризовать числом оборотов в
единицу времени n,
то можно ввести ускорение ε*: ![]()
где nt – число оборотов в момент времени t; n0 – число оборотов в момент начала отсчета времени t0.
Угловая
скорость равнопеременного вращения и
частота оборотов по истечении
времени t после
начала вращения равны ![]()
Угол
поворота при равнопеременном вращении
и число оборотов: ![]()
1/8 При
движении тела по криволинейной траектории
его скорость ![]() изменяется
по модулю и направлению. Изменение
вектора скорости
за
некоторый малый промежуток времени Δt можно
задать с помощью вектора
изменяется
по модулю и направлению. Изменение
вектора скорости
за
некоторый малый промежуток времени Δt можно
задать с помощью вектора ![]() (рис. 1).
(рис. 1).
Вектор
изменения скорости ![]() за
малое время Δt можно
разложить на две составляющие:
за
малое время Δt можно
разложить на две составляющие: ![]() направленную
вдоль вектора
(касательная
составляющая), и
направленную
вдоль вектора
(касательная
составляющая), и ![]() направленную
перпендикулярно вектору
(нормальная
составляющая).
направленную
перпендикулярно вектору
(нормальная
составляющая).
|
Рисунок 1 Изменение
вектора скорости по величине и
направлению. |

1/9
При криволинейном движении скорость направлена по касательной к траектории. Поскольку направление скорости постоянно изменяется, то криволинейное движение - всегда движение с ускорением, в том числе, когда модуль скорости остается неизменным |
|

В общем случае
ускорение направлено под углом к
скорости. Составляющая ускорения,
направленная вдоль скорости,
называется тангенциальным
ускорением |
Составляющая
ускорения, направленная к центру
кривизны траектории, т.е. перпендикулярно
(нормально) скорости, называется нормальным
ускорением |
Здесь R - радиус
кривизны траектории в данной
точке.Тангенциальное и нормальное
ускорение взаимноперпендикулярны,
поэтому модуль полного ускорения |

 .
.
1/10 В
общем случае угловая скорость (![]() )
и угловое ускорение (
)
и угловое ускорение (![]() )
вычисляются по формулам:
)
вычисляются по формулам:  ,
,  , где
, где ![]() -
угол поворота радиусa-вектора материальной
точки или абсолютно твердого тела. При
равномерном вращательном движении
-
угол поворота радиусa-вектора материальной
точки или абсолютно твердого тела. При
равномерном вращательном движении  ,
,  ,
,  ,
где
,
где ![]() -
радиус окружности,
-
радиус окружности, ![]() -
линейная скорость,
-
линейная скорость, ![]() -
частота вращения,
-
частота вращения, ![]() -
период вращения. При равноускоренном
вращательном движении
-
период вращения. При равноускоренном
вращательном движении ![]() ,
,  ,
где
,
где ![]() -
начальная угловая скорость,
- угловое
ускорение. Связь угловой и линейной
скорости материальной точки
-
начальная угловая скорость,
- угловое
ускорение. Связь угловой и линейной
скорости материальной точки ![]() ,
углового и тангенциального ускорения
,
углового и тангенциального ускорения ![]() .
При движении тела под действием силы
тяжести полное линейное ускорение
постоянно и равно ускорению свободного
падения
.
При движении тела под действием силы
тяжести полное линейное ускорение
постоянно и равно ускорению свободного
падения ![]() .
.
2/1 Взаимодействие материальных точек (тел) описывается третьим законом Ньютона: всякое действие материальных точек (тел) друг на друга носит характер взаимодействия; силы, с которыми действуют друг на друга материальные точки, всегда равны по модулю, противоположно направлены и действуют вдоль прямой, соединяющей эти точки: F12 = - F21, где F12 - сила, действующая на первую материальную точку со стороны второй; F21 - сила, действующая на вторую материальную точку со стороны первой. Эти силы приложены к разным материальным точкам (телам), всегда действуют парами и являются силами одной природы. С помощью третего закона Ньютона мы осуществляем переход от динамики одной материальной точки к динамике системы материальных точек, т.к. и для системы материальных точек взаимодействие сводится к силам взаимного парного взаимодействия между материальными точками.
2/2 К выводу о существовании явления инерции впервые пришел Галилей, а затем Ньютон. Этот вывод формулируется в виде первого закона Ньютона (закона инерции): существуют такие системы отсчета, относительно которых тело (материальная точка) при отсутствии на нею внешних воздействий (или при их взаимной компенсации) сохраняет состояние покоя или равномерного прямолинейного движения.
Системы отсчета, в которых выполняется первый закон Ньютона, называют инерциальными. Следовательно, инерциальными являются такие системы отсчета, относительно которых материальная точка при отсутствии на нее внешних воздействий или их взаимной компенсации покоится или движется равномерно и прямолинейно.
Наблюдения показывают, что с очень высокой степенью точности можно считать инерциальной системой отсчета гелиоцентрическую систему, у которой начало координат связано с Солнцем, а оси направлены на определенные "неподвижные" звезды. Системы отсчета, жестко связанные с поверхностью Земли, строго говоря, не являются инерциальными, так как Земля движется по орбите вокруг Солнца и при этом вращается вокруг своей оси. Однако при описании движений, не имеющих глобального (т. е. всемирного) масштаба, системы отсчета, связанные с Землей, можно с достаточной точностью считать инерциальными. Инерциальными являются и системы отсчета, которые движутся равномерно и прямолинейно относительно какой-либо инерциальной системы отсчета (см. далее). Галилей установил, что никакими механическими опытами, поставленными внутри инерциальной системы отсчета, невозможно установить, покоится эта система или движется равномерно и прямолинейно. Это утверждение носит название принципа относительности Галилея или механического принципа относительности. Этот принцип был впоследствии развит А. Эйнштейном и является одним из постулатов специальной теории относительности.
Инерциальные системы отсчета играют в физике исключительно важную роль, так как, согласнопринципу относительности Эйнштейна, математическое выражение любою закона физики имеет одинаковый вид в каждой инерциальной системе отсчета. В дальнейшем мы будем пользоваться только инерциальными системами (не упоминая об этом каждый раз).
Системы отсчета, в которых первый закон Ньютона не выполняется, называют неинерциальными. К таким системам относится любая система отсчета, движущаяся с ускорением относительно инерциальной системы отсчета.
2/3 Ма́сса — скалярная физическая величина, одна из важнейших величин в физике. Первоначально она характеризовала «количество вещества» в физическом объекте, от которого, по представлениям того времени, зависели как способность объекта сопротивляться приложенной силе (инертность), так и гравитационные свойства — вес. В современной физике понятие «количество вещества» имеет другой смысл, а концепцию «масса» можно трактовать несколькими способами:
Пассивная гравитационная масса показывает, с какой силой тело взаимодействует с внешними гравитационными полями — фактически эта масса положена в основу измерения массы взвешиванием в современной метрологии.
Активная гравитационная масса показывает, какое гравитационное поле создаёт само это тело — гравитационные массы фигурируют в законе всемирного тяготения.
Инертная масса характеризует меру инертности тел и фигурирует в одной из формулировок второго закона Ньютона. Если произвольная сила в инерциальной системе отсчёта одинаково ускоряет разные исходно неподвижные тела, этим телам приписывают одинаковую инертную массу.
2/4 Си́ла — векторная физическая величина, являющаяся мерой интенсивности воздействия на данноетело других тел, а также полей. Приложенная к массивному телу сила является причиной изменения его скорости или возникновения в нём деформаций.[1]
Сила как векторная величина характеризуется модулем, направлением и «точкой» приложениясилы. Последним параметром понятие о силе, как векторе в физике, отличается от понятия о векторе в векторной алгебре, где равные по модулю и направлению векторы, независимо от точки их приложения, считаются одним и тем же вектором . В физике эти векторы называются свободными векторами. В механике чрезвычайно распространено представление о связанных векторах, начало которых закреплено в определённой точке пространства или же может находиться на линии, продолжающей направление вектора (скользящие векторы). [2].
2/2 Первый закон Ньютона постулирует наличие такого явления, как инерция тел. Поэтому он также известен как Закон инерции. Инерция — это явление сохранения телом скорости движения (и по величине, и по направлению), когда на тело не действуют никакие силы. Чтобы изменить скорость движения, на тело необходимо подействовать с некоторой силой. Естественно, результат действия одинаковых по величине сил на различные тела будет различным. Таким образом, говорят, что тела обладают инертностью. Инертность — это свойство тел сопротивляться изменению их текущего состояния. Величина инертности характеризуется массой тела.
2/5 Второй закон Ньютона — дифференциальный закон движения, описывающий зависимость ускорения тела от равнодействующей всех приложенных к телу сил. Один из трёх законов Ньютона.
Второй закон Ньютона в его наиболее распространённой формулировке утверждает: в инерциальных системах ускорение, приобретаемое материальной точкой (телом), прямо пропорционально вызывающей его силе, совпадает с ней по направлению иобратно пропорционально массе материальной точки (тела)
2/7 Фундамента́льные взаимоде́йствия — качественно различающиеся типы взаимодействияэлементарных частиц и составленных из них тел.
На сегодня достоверно известно существование четырех фундаментальных взаимодействий:
гравитационного
электромагнитного
сильного
слабого
В физике механическая энергия делится на два вида — потенциальную и кинетическую энергию. Причиной изменения движения тел (изменения кинетической энергии) является сила (потенциальная энергия) (см. второй закон Ньютона). Исследуя окружающий нас мир, мы можем заметить множество самых разнообразных сил: сила тяжести, сила натяжения нити, сила сжатия пружины, сила столкновения тел, сила трения, сила сопротивления воздуха, сила взрыва и т. д. Однако когда была выяснена атомарная структура вещества, стало понятно, что все разнообразие этих сил есть результат взаимодействия атомов друг с другом. Поскольку основной вид межатомного взаимодействия — электромагнитное, то, как оказалось, большинство этих сил — лишь различные проявления электромагнитного взаимодействия. Одно из исключений составляет, например, сила тяжести, причиной которой является гравитационное взаимодействие между телами, обладающими массой.
2/8
Все тела взаимодействуют друг с другом с силой, прямо пропорциональной произведению масс этих тел и обратно пропорциональной квадрату расстояния между ними.
|
|
Закон справедлив для: 1. Однородных шаров. 2. Для материальных точек. 3. Для концентрических тел. Гравитационное взаимодействие существенно при больших массах. |
|
Применение: 1. Закономерности движения планет и их спутников. Уточнены законы Кеплера. 2. Космонавтика. Расчет движения спутников. |
2/9  При взаимодействии двух тел оба тела
получают ускорения, направленные в
противоположные стороны. При этом
отношение абсолютных значений ускорений
взаимодействующих тел равно обратному
отношению их масс
При взаимодействии двух тел оба тела
получают ускорения, направленные в
противоположные стороны. При этом
отношение абсолютных значений ускорений
взаимодействующих тел равно обратному
отношению их масс ![]() Влияние
одного тела на другое называется силой. Данное
воздействие может вызывать ускорение
и деформацию тела, на которое воздействуют.
В механике рассматриваются
сила тяжести, сила упругости и
сила трения.
Влияние
одного тела на другое называется силой. Данное
воздействие может вызывать ускорение
и деформацию тела, на которое воздействуют.
В механике рассматриваются
сила тяжести, сила упругости и
сила трения.
Сила
тяжести -
это сила, с которой Земля притягивает
к себе все тела, находящиеся вблизи ее
поверхности ![]() Сила
тяжести приложена к самому телу и
направлена вертикально вниз (рис.
1а). Сила
упругости возникает
при деформации тела, она
направлена перпендикулярно поверхности
соприкосновения взаимодействующих
тел. Сила упругости пропорциональна
удлинению:
Сила
тяжести приложена к самому телу и
направлена вертикально вниз (рис.
1а). Сила
упругости возникает
при деформации тела, она
направлена перпендикулярно поверхности
соприкосновения взаимодействующих
тел. Сила упругости пропорциональна
удлинению: ![]() Знак
«-» показывает, что сила упругости
направлена в сторону, противоположную
удлинению, k - жесткость (пружины) зависит
от ее геометрических размеров и
материала. Сила, возникающая в месте
соприкосновения тел и препятствующая
их относительному перемещению,
называется силой
трения. Если
тело скользит по какой-либо поверхности,
то его движению препятствует сила
трения скольжения(
Знак
«-» показывает, что сила упругости
направлена в сторону, противоположную
удлинению, k - жесткость (пружины) зависит
от ее геометрических размеров и
материала. Сила, возникающая в месте
соприкосновения тел и препятствующая
их относительному перемещению,
называется силой
трения. Если
тело скользит по какой-либо поверхности,
то его движению препятствует сила
трения скольжения(![]() ,
где N - сила реакции опоры (рис. 2), m -
коэффициент трения скольжения). Сила
трения скольжения всегда направлена
против движения тела. Сила
тяжести и сила упругости -
это силы, зависящие от координат
взаимодействующих тел относительно
друг друга. Сила трения зависит от
скорости тела, но не зависит от координат.
Как в природе, так и в технике эти силы
проявляются одновременно или парами.
Например, сила трения увеличивается
при увеличении силы тяжести. В быту
часто полезное трение усиливают, а
вредное - ослабляют (применяют смазку,
заменяют трение скольжения трением
качения).
,
где N - сила реакции опоры (рис. 2), m -
коэффициент трения скольжения). Сила
трения скольжения всегда направлена
против движения тела. Сила
тяжести и сила упругости -
это силы, зависящие от координат
взаимодействующих тел относительно
друг друга. Сила трения зависит от
скорости тела, но не зависит от координат.
Как в природе, так и в технике эти силы
проявляются одновременно или парами.
Например, сила трения увеличивается
при увеличении силы тяжести. В быту
часто полезное трение усиливают, а
вредное - ослабляют (применяют смазку,
заменяют трение скольжения трением
качения).
2/10 Неинерциа́льная систе́ма отсчёта — система отсчёта, не являющаяся инерциальной. Всякая система отсчета, движущаяся с ускорением относительно инерциальной, является неинерциальной.
При рассмотрении уравнений движения тела в неинерциальной системе отсчета необходимо учитывать дополнительные силы инерции
Классическая механика постулирует следующие два принципа:
время абсолютно, то есть промежутки времени между любыми двумя событиями одинаковы во всех произвольно движущихся системах отсчёта;
пространство абсолютно, то есть расстояние между двумя любыми материальными точками одинаково во всех произвольно движущихся системах отсчёта.
Эти два принципа позволяют записывать уравнение движения материальной точки относительно любой неинерциальной системы отсчёта, в которой не выполняется первый закон Ньютона.
Основное уравнение динамики относительного движения материальной точки имеет вид:
![]() ,
,
где ![]() — масса тела,
— масса тела, ![]() —
ускорение тела относительно неинерциальной
системы отсчёта,
—
ускорение тела относительно неинерциальной
системы отсчёта, ![]() —
сумма всех внешних сил, действующих на
тело,
—
сумма всех внешних сил, действующих на
тело, ![]() — переносное
ускорение тела,
— переносное
ускорение тела, ![]() — кориолисово
ускорение тела.
— кориолисово
ускорение тела.
Это уравнение может быть записано в привычной форме Второго закона Ньютона, если ввести фиктивные силы инерции:
 —
переносная сила
инерции
—
переносная сила
инерции — сила
Кориолиса
— сила
Кориолиса
2/11 Силы
инерции —
силы, обусловленные
ускоренным движением неинерциальной
системы отсчета (НСО) относительно
инерциальной системы отсчета (ИСО).
Основной закон динамики для неинерциальных
систем отсчета: ![]() ,
где
,
где
![]() — сила, действующая на тело со стороны
других тел;
— сила, действующая на тело со стороны
других тел;
![]() — сила инерции,
действующая на тело относительно
поступательно движущейся НСО.
— сила инерции,
действующая на тело относительно
поступательно движущейся НСО. ![]() —
ускорение НСО относительно ИСО. Она
появляется, например, в самолете при
разгоне на взлетной полосе;
—
ускорение НСО относительно ИСО. Она
появляется, например, в самолете при
разгоне на взлетной полосе;
![]() —
центробежная сила
инерции, действующая на тело относительно
вращающейся НСО.
—
центробежная сила
инерции, действующая на тело относительно
вращающейся НСО. ![]() —
угловая скорость НСО относительно
ИСО,
—
угловая скорость НСО относительно
ИСО, ![]() —
расстояние от тела до центра вращения;
—
расстояние от тела до центра вращения;
![]() — кориолисова сила
инерции, действующая на тело, движущееся
со скоростью
— кориолисова сила
инерции, действующая на тело, движущееся
со скоростью ![]() относительно
вращающейся НСО.
относительно
вращающейся НСО. ![]() — угловая скорость НСО относительно
ИСО (вектор направлен вдоль оси вращения
в соответствии с правилом правого
винта).
— угловая скорость НСО относительно
ИСО (вектор направлен вдоль оси вращения
в соответствии с правилом правого
винта).
3/1 За́мкнутая систе́ма представляет собой систему, в которой отсутствует обмен веществом, энергией и информацией с внешней средой или окружением. Это отличает замкнутую систему от изолированной системы, где допускается обмен информацией, и также от закрытой системы, где возможен обмен энергией. С точки зрения теории бесконечной вложенности материи представление о замкнутой системе является идеализацией, поскольку экранировать любую систему от внешних воздействий одновременно на всех уровнях материи невозможно.
Замкнутая система в механике может быть определена как такая система тел, на которую не действуют внешние силы, либо действия этих внешних сил на тела системы полностью скомпенсированы.
3/2 В классической механике полным импульсом системы материальных точек называется векторная величина, равная сумме произведений масс материальных точек на их скорости:
![]()
соответственно
величина ![]() называется
импульсом одной материальной точки.
Это векторная величина, направленная
в ту же сторону, что и скорость частицы.
Единицей измерения импульса в Международной
системе единиц (СИ)является килограмм-метр
в секунду (кг·м/с).
называется
импульсом одной материальной точки.
Это векторная величина, направленная
в ту же сторону, что и скорость частицы.
Единицей измерения импульса в Международной
системе единиц (СИ)является килограмм-метр
в секунду (кг·м/с).
Если мы имеем дело с телом конечного размера, не состоящим из дискретных материальных точек, для определения его импульса необходимо разбить тело на малые части, которые можно считать материальными точками и просуммировать по ним, в результате получим:
![]()
Импульс системы, на которую не действуют никакие внешние силы (или они скомпенсированы), сохраняется во времени:
![]() .
(*)
.
(*)
Сохранение импульса в этом случае следует из второго и третьего закона Ньютона: написав второй закон Ньютона для каждой из составляющих систему материальных точек и просуммировав по всем материальным точкам, составляющим систему, в силу третьего закона Ньютона получим равенство (*).
3/3 Закон изменения и сохранения импульса системы

|
 ,
,3/5 При прямолинейном движении одной материальной точки и постоянном значении приложенной к ней силы работа (этой силы) равна произведению величины проекции вектора силы на направление движения и величины совершённого перемещения[3]:
![]()
Здесь
точкой обозначено скалярное
произведение[4], ![]() — вектор
перемещения;
подразумевается, что действующая
сила
постоянна
в течение всего того времени, за которое
вычисляется работа.
— вектор
перемещения;
подразумевается, что действующая
сила
постоянна
в течение всего того времени, за которое
вычисляется работа.
Если сила не постоянна, то в этом случае она вычисляется как интеграл[5]:
![]()
(подразумевается
суммирование по кривой, которая является
пределом ломаной, составленной из
последовательных перемещений ![]() если
вначале считать их конечными, а потом
устремить длину каждого к нулю).
если
вначале считать их конечными, а потом
устремить длину каждого к нулю).
Если существует зависимость силы от координат[6], интеграл определяется[7] следующим образом:
 ,
где
,
где ![]() и
и ![]() — радиус-векторы начального
и конечного положения тела соответственно.
— радиус-векторы начального
и конечного положения тела соответственно.
Cледствие: если направление движения тела ортогонально силе, работа (этой силы) равна нулю.
3/6 Мо́щность — физическая величина, равная отношению работы, выполняемой за некоторый промежуток времени, к этому промежутку времени.
Различают
среднюю мощность за промежуток времени ![]() :
:
![]()
и мгновенную мощность в данный момент времени:
![]()
Так как работа является мерой изменения энергии, мощность можно определить также как скорость изменения энергии системы.
3/7 Кинетическая энергия, энергия механической системы, зависящая от скоростей движения её точек. Кинетическая энергия Т материальной точки измеряется половиной произведения массы m этой точки на квадрат её скорости u, т. е. Т = 1/2 mu2. Кинетическая энергия механической системы равна арифметической сумме Кинетическая энергия всех её точек: Т = S1/2 mku2k. Выражение Кинетическая энергия системы можно ещё представить в виде Т = 1/2 Muc2 + Tc,где М — масса всей системы, uc — скорость центра масс, Tc — Кинетическая энергия системы в её движении вокруг центра масс. Кинетическая энергия твёрдого тела, движущегося поступательно, вычисляется так же, какКинетическая энергия точки, имеющей массу, равную массе всего тела. Формулы для вычисления Кинетическая энергия тела, вращающегося вокруг неподвижной оси, см. в ст. Вращательное движение.
3/9 Если в каждой точке пространства на помещенную туда частицу действует сила, то говорят, что частица находится в поле сил. Так, например, частица может находиться в поле сил тяжести, в поле упругих сил, в поле сил сопротивления (в потоке жидкости, газе).
Поле сил, остающееся постоянным во времени, называется стационарным. В стационарном силовом поле сила, действующая на частицу, зависит только от ее положения. Работа, которую совершают силы поля при перемещении частицы из точки 1 в точку 2, зависит, вообще говоря, от траектории, по которой перемещается частица из начального положения в конечное. Вместе с тем, имеются стационарные силовые поля, в которых работа, совершаемая над частицами силами поля, не зависит от формы траектории между точками 1 и 2. Силы, обладающие таким свойством, называются потенциальными или консервативными, а соответствующее поле сил – потенциальным полем. Примером потенциальных сил являются упругие силы, сила тяжести.
Рис. 3.10 |

На этом основании можно утверждать, что потенциальным называется поле, в котором работа сил по замкнутому контуру равна нулю. С другой стороны, очевидно, – чтобы поле было потенциальным, нужно, чтобы работа сил поля на любом замкнутом контуре была равна нулю.
Все силы, не являющиеся потенциальными, называются непотенциальными или диссипативными. К числу непотенциальных сил относятся, например, силы трения и сопротивления. Работа этих сил зависит от формы траектории между начальным и конечным положениями частицы (и не равна нулю при перемещении вдоль замкнутого контура).
3/10 Вну́тренняя эне́ргия тела (обозначается как E или U) — это сумма энергий молекулярных взаимодействий и тепловых движений молекулы. Внутренняя энергия является однозначной функцией состояния системы. Это означает, что всякий раз, когда система оказывается в данном состоянии, её внутренняя энергия принимает присущее этому состоянию значение, независимо от предыстории системы. Следовательно, изменение внутренней энергии при переходе из одного состояния в другое будет всегда равно разности между ее значениями в конечном и начальном состояниях, независимо от пути, по которому совершался переход.
Внутреннюю энергию тела нельзя измерить напрямую. Можно определить только изменение внутренней энергии:
![]()
где
 —
подведённая к
телу теплота,
измеренная в джоулях
—
подведённая к
телу теплота,
измеренная в джоулях [1] — работа,
совершаемая телом против внешних сил,
измеренная в джоулях
[1] — работа,
совершаемая телом против внешних сил,
измеренная в джоулях
Эта формула является математическим выражением первого начала термодинамики
Для квазистатических процессов выполняется следующее соотношение:
![]()
где
 — температура,
измеренная в кельвинах
— температура,
измеренная в кельвинах — энтропия,
измеренная в джоулях/кельвин
— энтропия,
измеренная в джоулях/кельвин — давление,
измеренное в паскалях
— давление,
измеренное в паскалях — химический
потенциал
— химический
потенциал —
количество частиц
в системе
—
количество частиц
в системе
3/11 Потенциальной энергией называют энергию взаимодействия тел или частей тела, зависящую от их взаимного положения.
Потенциальной энергией обладают все взаимодействующие тела. Так, любое тело взаимодействует с Землей, следовательно, тело и Земля обладают потенциальной энергией. Частицы, из которых состоят тела, тоже взаимодействуют между собой, и они также обладают потенциальной энергией.
Поскольку потенциальная энергия — это энергия взаимодействия, то она относится не к одному телу, а к системе взаимодействующих тел. В том случае, когда мы говорим о потенциальной энергии тела, поднятого над Землей, систему составляют Земля и поднятое над ней тело.
3/12 Полной механической энергией системы тел называется сумма кинетической и потенциальной энергий:
E = Eк + Eп.
Какие причины могут изменить полную механическую энергию?
Р ассмотрим
систему тел, в которой действуют следующие
силы:
ассмотрим
систему тел, в которой действуют следующие
силы:
|
fпот.с. - внутренняя потенциальная сила; |
|
fнепот.с. - внутренняя непотенциальная сила; |
|
Fвнеш.с. - внешняя сила. |
Изменение кинетической энергии системы равно суммарной работе всех сил, действующих на тела этой системы (см. тему 3):
Eк = Aпот.с.+ Aнепот.с.+ Aвнеш.с. (1)
Изменение потенциальной энергии системы равно работе потенциальных сил с обратным знаком (см. тему 4):
Eп = - Aпот.с. (2)
Очевидно, что изменение полной механической энергии равно:
E = Eп +Eк (3)
Из уравнений (1-3) получим, что изменение полной механической энергии равно суммарной работе всех внешних сил и внутренних непотенциальных сил. Eк = Aвнеш.с.+ Aнепот.с. (4)
Формула (4) представляет из себя закон изменения полной механической энергии системы тел.
Существует 2 причины изменения энергии системы:
|
действие внешних сил; |
|
действие внутренних непотенциальных сил. |
Очевидно, что полная механическая энергия замкнутой системы, в которой действуют только потенциальные силы, не изменяется при любых перемещениях тел. Это утверждение называется законом сохранения механической энергии.
3/13 Моме́нт и́мпульса (кинетический момент, угловой момент, орбитальный момент, момент количества движения) характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какойскоростью происходит вращение.
Момент
импульса ![]() частицы
относительно некоторого начала отсчёта
определяетсявекторным
произведением её радиус-вектора и импульса:
частицы
относительно некоторого начала отсчёта
определяетсявекторным
произведением её радиус-вектора и импульса:
![]()
где ![]() —
радиус-вектор частицы относительно
выбранного неподвижного в данной системе
отсчёта начала отсчёта,
—
радиус-вектор частицы относительно
выбранного неподвижного в данной системе
отсчёта начала отсчёта, ![]() —
импульс частицы.
—
импульс частицы.
Для нескольких частиц момент импульса определяется как (векторная) сумма таких членов:
![]()
где ![]() —
радиус-вектор и импульс каждой частицы,
входящей в систему, момент импульса
которой определяется.
—
радиус-вектор и импульс каждой частицы,
входящей в систему, момент импульса
которой определяется.
В системе СИ момент импульса измеряется в единицах джоуль-секунда; Дж·с.
Из определения момента импульса следует его аддитивность: как, для системы частиц в частности, так и для системы, состоящей из нескольких подсистем, выполняется:
![]()
3/14
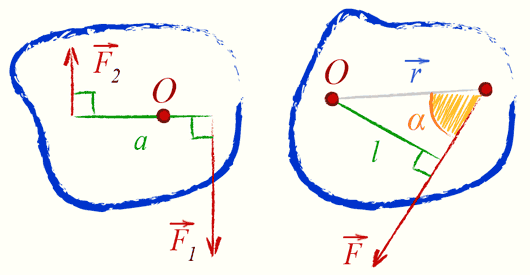
Сила приложенная к твердому телу, которое может вращаться вокруг некоторой точки, создает момент силы. Действие момента силы аналогично действию пары сил.
 Момент
силы
Момент
силы
Момент силы относительно некоторой точки — это векторное произведение силы на кратчайшее расстояние от этой точки до линии действия силы.
Единица СИ момента силы:
1. |
[M]= Ньютон · метр |
Е сли:
M —
момент силы (Ньютон · метр),
F —
Приложенная сила (Ньютон),
r —
расстояние от центра вращения до места
приложения силы (метр),
l —
длина перпендикуляра, опущенного из
центра вращения на линию действия силы
(метр),
α —
угол, между вектором силы F и
вектором положения r,
То
сли:
M —
момент силы (Ньютон · метр),
F —
Приложенная сила (Ньютон),
r —
расстояние от центра вращения до места
приложения силы (метр),
l —
длина перпендикуляра, опущенного из
центра вращения на линию действия силы
(метр),
α —
угол, между вектором силы F и
вектором положения r,
То
2. |
M= F·l= F·r·sin(α) |
или в виде векторного произведения
3. |
=
·
|
Момент силы — аксиальный вектор. Он направлен вдоль оси вращения. Направление вектора момента силы определяется правилом буравчика, а величина его равна M.
Аксиальные векторы не связаны с определенной линией действия. Их можно перемещать в пространстве параллельно самим себе (свободные векторы).
3/15 Закон изменения момента импульса.
Рассмотрим произвольную систему тел. Моментом импульса системы назовем величину L, равную векторной сумме моментов импульсов отдельных ее частей Li, взятых относительно одной и той же точки выбранной системы отсчета.
L = ΣLi.
Найдем скорость изменения момента импульса системы. Проведя рассуждения, аналогичные описанию вращательного движения твердого тела, получим, что
скорость изменения момента импульса системы равна векторной сумме моментов внешних сил M, действующих на части этой системы.
dL/dt = M.
Причем вектора L и M задаются относительно одной и той же точки O в выбранной СО. Уравнение (21) представляет собой закон изменения момента импульса системы.
Закон сохранения момента импульса.
Из закона изменения момента импульса, полученного нами для системы тел, вытекает закон сохранения момента импульса применительно к механике:
момент импульса системы тел сохраняется неизменным при любых взаимодействиях внутри системы, если результирующий момент внешних сил, действующих на нее, равен нулю.
Еще раз подчеркнем, что при использовании этого закона моменты импульса и сил необходимо брать относительно одно и той же оси.
Закон сохранения момента импульса является фундаментальным законом природы и выполняется для любых, а не только механических систем.
3/16 В механике твердое тело можно определить как систему материальных точек, расстояния между которыми неизменны. Реально существующие в природе системы могут, конечно, удовлетворять этому условию лишь приближенно. Но большинство твердых тел в обычных условиях так мало изменяет свою форму и размеры, что при изучении законов движения твердого тела, рассматриваемого как нечто целое, можно вполне отвлечься от этих изменений. Для вычисления кинетической энергии твердого тела рассмотрим его как дискретную систему материальных точек:
T = ![]()
![]() ,
,
где суммирование производится по всем точкам, составляющим тело. Здесь и ниже мы опускаем индексы, нумерующие эти точки, с целью упрощения записи формул.
3/19
Теоре́ма
Гю́йгенса — Ште́йнера,
или просто теорема
Штейнера (названа
по имени швейцарского математика Якоба
Штейнера и
голландского математика, физика и
астронома Христиана
Гюйгенса): момент
инерции тела ![]() относительно
произвольной оси равен сумме момента
инерции этого тела
относительно
произвольной оси равен сумме момента
инерции этого тела ![]() относительно
параллельной ей оси, проходящей через
центр масс тела, и произведения массы
тела
относительно
параллельной ей оси, проходящей через
центр масс тела, и произведения массы
тела ![]() на
квадрат расстояния
на
квадрат расстояния ![]() между
осями:
между
осями:
![]()
где
— известный момент инерции относительно оси, проходящей через центр масс тела,
— искомый момент инерции относительно параллельной оси,
— масса тела,
— расстояние между указанными осями.
3/20 Так как твердое тело является механической системой с шестью степенями свободы, то для описания его движения требуется шесть независимых числовых уравнений или два независимых векторных уравнения.
Одно из них - это уравнение движения центра масс С
![]() ,
где
,
где ![]() .
(1)
.
(1)
Второе - уравнение моментов
![]() .
(2)
.
(2)
Если твердое тело покоится, то уравнения (1) и (2) переходят в
![]() .
(3)
.
(3)
3/18 МОМЕНТОМ ИНЕРЦИИ I тела относительно точки, оси или плоскости называется сумма произведений массы точек тела mi, на квадраты их расстояний ri до точки, оси или плоскости:
![]()
Момент инерции тела относительно оси является мерой инерции тела во вращательном движении вокруг этой оси.
Момент инерции тела может быть также выражен через массу М тела и его радиус инерции r:
![]()
МОМЕНТЫ ИНЕРЦИИ ОТНОСИТЕЛЬНО ОСЕЙ, ПЛОСКОСТЕЙ И НАЧАЛА ДЕКАРТОВЫХ КООРДИНАТ.
Осевые моменты инерции:

Моменты инерции относительно плоскостей координат:
![]()
Момент инерции относительно начала координат (полярный момент инерции):
![]()
Центробежные моменты инерции
![]()
4/2 Колебаниями называются движения или процессы, которые характеризуются определенной повторяемостью во времени. При колебательном движении маятника изменяется координата его центра масс, в случае переменного тока колеблются напряжение и ток в цепи. Колебания называются свободными (или собственными), если они совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздействий на колебательную систему (систему, совершающую колебания). Простейшим типом колебаний являются гармонические колебания — колебания, при которых колеблющаяся величина изменяется со временем по закону синуса (косинуса).
Гармонические колебания величины s описываются уравнением типа
![]() (1.1)
(1.1)
где А — максимальное значение колеблющейся величины, называемое амплитудой колебания, (ω0 — круговая (циклическая) частота,— начальная фаза колебания в момент времени t = 0, (ω0t+φ) — фаза колебания в момент времени t). Фаза колебания определяет значение колеблющейся величины в данный момент времени.
4/3 Затухающие
колебания —
колебания, энергия которых уменьшается
с течением времени. Бесконечно длящийся
процесс вида ![]() в
природе невозможен. Свободные колебания
любого осциллятора рано или поздно
затухают и прекращаются. Поэтому на
практике обычно имеют дело с затухающими
колебаниями. Они характеризуются тем,
что амплитуда колебаний A является
убывающей функцией. Обычно затухание
происходит под действием сил сопротивления
среды, наиболее часто выражаемых линейной
зависимостью от скорости колебаний
в
природе невозможен. Свободные колебания
любого осциллятора рано или поздно
затухают и прекращаются. Поэтому на
практике обычно имеют дело с затухающими
колебаниями. Они характеризуются тем,
что амплитуда колебаний A является
убывающей функцией. Обычно затухание
происходит под действием сил сопротивления
среды, наиболее часто выражаемых линейной
зависимостью от скорости колебаний ![]() или
её квадрата.
или
её квадрата.
В акустике: затухание — уменьшение уровня сигнала до полной неслышимости.
4/4 Дифференциальное
уравнение свободных затухающих
колебаний линейной
системы определяется как
![]() (1)
где
s – колеблющаяся величина, которая
описывает тот или иной физический
процесс, δ = const — коэффициент
затухания,
ω0 -
циклическая частота свободных незатухающих
колебаний той же колебательной системы,
т. е. при δ=0 (при отсутствии потерь
энергии) называется собственной
частотой колебательной
системы.
Решение
уравнения (1) запишем в виде
(1)
где
s – колеблющаяся величина, которая
описывает тот или иной физический
процесс, δ = const — коэффициент
затухания,
ω0 -
циклическая частота свободных незатухающих
колебаний той же колебательной системы,
т. е. при δ=0 (при отсутствии потерь
энергии) называется собственной
частотой колебательной
системы.
Решение
уравнения (1) запишем в виде ![]() (2) ,
где
u=u(t). После взятия первой и второй
производных (2) и подстановки их в
выражение (1) найдем
(2) ,
где
u=u(t). После взятия первой и второй
производных (2) и подстановки их в
выражение (1) найдем ![]() (3)
Решение
уравнения (3) зависит от знака коэффициента
перед искомой величиной. Рассмотрим
случай положителньного коэффициента:
(3)
Решение
уравнения (3) зависит от знака коэффициента
перед искомой величиной. Рассмотрим
случай положителньного коэффициента: ![]() (4) (если
(ω02 -
σ2)>0,
то такое обозначение мы вправе сделать).
Тогда получим выражение
(4) (если
(ω02 -
σ2)>0,
то такое обозначение мы вправе сделать).
Тогда получим выражение ![]() ,
у которого решение будет функция
,
у которого решение будет функция ![]() .
Значит, решение уравнения (1) в случае
малых затуханий (ω02 >>
σ2 )
.
Значит, решение уравнения (1) в случае
малых затуханий (ω02 >>
σ2 )
![]() (5), где
(5), где ![]() (6)
— амплитуда
затухающих колебаний,
а А0 —
начальная амплитуда. Выражение (5)
представлено графики рис. 1 сплошной
линией, а (6) — штриховыми линиями.
Промежуток времени τ = 1/σ, в течение
которого амплитуда затухающих колебаний
становится мешьше в е раз, называется временем
релаксации.
(6)
— амплитуда
затухающих колебаний,
а А0 —
начальная амплитуда. Выражение (5)
представлено графики рис. 1 сплошной
линией, а (6) — штриховыми линиями.
Промежуток времени τ = 1/σ, в течение
которого амплитуда затухающих колебаний
становится мешьше в е раз, называется временем
релаксации.
При
рассмотрении механических колебаний,
то роль X(t) играет внешняя вынуждающая
сила ![]() (1)
С
учетом (1) закон движения для пружинного
маятника (формула (9) предыдущего раздела)
запишется как
(1)
С
учетом (1) закон движения для пружинного
маятника (формула (9) предыдущего раздела)
запишется как ![]() Используя
формулу для циклической частоты свободных
незатухающих колебаний прижинного
маятника и (10) предыдущего раздела,
получим уравнение
Используя
формулу для циклической частоты свободных
незатухающих колебаний прижинного
маятника и (10) предыдущего раздела,
получим уравнение ![]() (2)
При
рассмотрении электрического колебательный
контура роль X(t) играет подводимая к
контуру внешняя соответсвующим образом
периодически изменяющаяся по гармоническому
закону э.д.с. или переменное
напряжение
(2)
При
рассмотрении электрического колебательный
контура роль X(t) играет подводимая к
контуру внешняя соответсвующим образом
периодически изменяющаяся по гармоническому
закону э.д.с. или переменное
напряжение ![]() (3)
Тогда
дифференциальное уравнение колебаний
заряда Q в простейшем контуре, используя
(3), можно записать как
(3)
Тогда
дифференциальное уравнение колебаний
заряда Q в простейшем контуре, используя
(3), можно записать как ![]()
4/5 Декремент
затухания, количественная
характеристика быстроты затухания
колебаний. Д. з. d равен натуральному
логарифму отношения двух последующих
максимальных отклонений х колеблющейся
величины в одну и ту же сторону:![]() Д.
з. — величина, обратная числу колебаний,
по истечении которых амплитуда убывает
в е раз. Например, если d = 0,01, то амплитуда
уменьшится в е раз после 100 колебаний.
Д. з. характеризует число периодов, в
течение которых происходит затухание
колебаний, а не время такого затухания.
Полное время затухания определяется
отношением Т/d.
Д.
з. — величина, обратная числу колебаний,
по истечении которых амплитуда убывает
в е раз. Например, если d = 0,01, то амплитуда
уменьшится в е раз после 100 колебаний.
Д. з. характеризует число периодов, в
течение которых происходит затухание
колебаний, а не время такого затухания.
Полное время затухания определяется
отношением Т/d.
Добротность колебательной системы.Добротность колебательной системы, отношение энергии, запасённой в колебательной системе, к энергии, теряемой системой за один период колебания. Добротность характеризует качество колебательной системы, т.к. чем больше Д. к. с., тем меньше потери энергии в системе за одно колебание. Д. к. с. Q связана с логарифмическим декрементом затухания d; при малых декрементах затухания Q " p/d. В колебательном контуре с индуктивностью L, ёмкостью C и омическим сопротивлением R Д. к. с.
![]()
где w — собственная частота контура. В механической системе с массой m, жёсткостью k и коэффициентом трения b Д. к. с.
![]()
4/6 Вынужденные колебания — колебания, происходящие под воздействием внешних сил, меняющихся во времени.
Автоколебания отличаются от вынужденных колебаний тем, что последние вызваны периодическим внешним воздействием и происходят с частотой этого воздействия, в то время как возникновение автоколебаний и их частота определяются внутренними свойствами самой автоколебательной системы.
Наиболее
простой и содержательный пример
вынужденных колебаний можно получить
из рассмотрения гармонического
осциллятора и
вынуждающей силы, которая изменяется
по закону: ![]() .
.
4/7 Чтобы
в реальной колебательной системе
получить незатухающие колебания, надо
компенсировать потери энергии. Такая
компенсация возможна с помощью какого-либо
периодически действующего фактора X(t),
изменяющего по гармоническому закону:![]() Если
рассматривать механические колебания,
то роль X(t)
играет внешняя вынуждающая сила
Если
рассматривать механические колебания,
то роль X(t)
играет внешняя вынуждающая сила![]() )
закон движения для пружинного маятника
запишется в виде
)
закон движения для пружинного маятника
запишется в виде![]() придем к уравнению
придем к уравнению![]() Если
рассматривать электрический колебательный
контур, то роль X(t)
играет подводимая к контуру внешняя
периодически изменяющаяся по гармоническому
закону э.д.с. или переменное
напряжение
Если
рассматривать электрический колебательный
контур, то роль X(t)
играет подводимая к контуру внешняя
периодически изменяющаяся по гармоническому
закону э.д.с. или переменное
напряжение![]() Тогда
уравнение (143.2) с учетом (147.3) можно
записать в виде
Тогда
уравнение (143.2) с учетом (147.3) можно
записать в виде![]() придем к уравнению
придем к уравнению![]()
Колебания,
возникающие под действием внешней
периодически изменяющейся силы или
внешней периодически изменяющейся
э.д.с., называются соответственно вынужденными
механическими и вынужденными
электромагнитными колебаниями.Уравнения
можно свести к линейному неоднородному
дифференциальному уравнению![]() применяя
впоследствии его решение для вынужденных
колебаний конкретной физической природы
(x0 в
случае механических колебаний
равно F0/m, в
случае электромагнитных — Um/L).Решение
уравнения равно сумме общего решения
однородного уравнения и частного
решения неоднородного уравнения. Частное
решение найдем в комплексной форме.
Заменим правую часть уравнения (147.5) на
комплексную величину х0
применяя
впоследствии его решение для вынужденных
колебаний конкретной физической природы
(x0 в
случае механических колебаний
равно F0/m, в
случае электромагнитных — Um/L).Решение
уравнения равно сумме общего решения
однородного уравнения и частного
решения неоднородного уравнения. Частное
решение найдем в комплексной форме.
Заменим правую часть уравнения (147.5) на
комплексную величину х0![]() :
:![]() Частное
решение этого уравнения будем искать
в виде
Частное
решение этого уравнения будем искать
в виде![]() Подставляя
выражение для s и
его производных
Подставляя
выражение для s и
его производных ![]() в
уравнение, получаем
в
уравнение, получаем![]() Так
как это равенство должно быть справедливым
для всех моментов времени, то время t из
него должно исключаться. Отсюда следует,
что =. Учитывая
это, из уравнения найдем величину s0 и
умножим ее числитель и знаменатель
на
Так
как это равенство должно быть справедливым
для всех моментов времени, то время t из
него должно исключаться. Отсюда следует,
что =. Учитывая
это, из уравнения найдем величину s0 и
умножим ее числитель и знаменатель
на ![]()
![]()
Это
комплексное число удобно представить
в экспоненциальной форме:![]()
где![]()
![]() Следовательно,
решение уравнения в комплексной форме
примет вид
Следовательно,
решение уравнения в комплексной форме
примет вид![]() Его
вещественная часть, являющаяся решением
уравнения, равна
Его
вещественная часть, являющаяся решением
уравнения, равна![]() где А и задаются
соответственно формулами Таким образом,
частное решение неоднородного уравнения
(147.5) имеет вид
где А и задаются
соответственно формулами Таким образом,
частное решение неоднородного уравнения
(147.5) имеет вид![]() Решение
уравнения равно сумме общего решения
однородного
уравнения
Решение
уравнения равно сумме общего решения
однородного
уравнения![]()
4/8 Рассмотрим
зависимость амплитуды А вынужденных
колебаний от частоты ω Из
формулы следует, что амплитуда А смещения
имеет максимум. Чтобы определить
резонансную частоту ωрез — частоту,
при которой амплитуда А смещения
достигает максимума, — нужно найти
максимум функции (1), или, что то же самое,
минимум подкоренного выражения.
Продифференцировав подкоренное выражение
по ω и приравняв его нулю, получим
условие, определяющее ωрез:
Из
формулы следует, что амплитуда А смещения
имеет максимум. Чтобы определить
резонансную частоту ωрез — частоту,
при которой амплитуда А смещения
достигает максимума, — нужно найти
максимум функции (1), или, что то же самое,
минимум подкоренного выражения.
Продифференцировав подкоренное выражение
по ω и приравняв его нулю, получим
условие, определяющее ωрез:![]() Это
равенство выполняется при ω=0, ±
Это
равенство выполняется при ω=0, ± ![]() ,
у которых только лишь положительное
значение имеет физический смысл.
Следовательно, резонансная частота
,
у которых только лишь положительное
значение имеет физический смысл.
Следовательно, резонансная частота![]() Явление
резкого возрастания амплитуды вынужденных
колебаний при приближении частоты
вынуждающей силы (частоты вынуждающего
переменного напряжения) к частоте,
равной или близкой собственной частоте
колебательной системы, называется
резонансом. При δ2«ω2 значение ωрез
практически совпадает с собственной
частотой ω0 колебательной системы.
Подставляя уравнеие в формулу, получим
Явление
резкого возрастания амплитуды вынужденных
колебаний при приближении частоты
вынуждающей силы (частоты вынуждающего
переменного напряжения) к частоте,
равной или близкой собственной частоте
колебательной системы, называется
резонансом. При δ2«ω2 значение ωрез
практически совпадает с собственной
частотой ω0 колебательной системы.
Подставляя уравнеие в формулу, получим Из
формулы вытекает, что при малом затухании
(δ2«ω2) резонансная амплитуда смещения
Из
формулы вытекает, что при малом затухании
(δ2«ω2) резонансная амплитуда смещения![]() где
Q —добротность колебательной системы,
где
Q —добротность колебательной системы, ![]() –
рассмотренное выше статическое
отклонение.
–
рассмотренное выше статическое
отклонение.
4/9 Типичные
черты Резонанс можно
выяснить, рассматривая случай
гармонического воздействия на систему
с одной степенью свободы: например, на
массу m,
подвешенную на пружине, находящуюся
под действием гармонической силы F= F0 coswt
Примем, что пружина подчиняется закону
Гука (это предположение необходимо,
чтобы система была линейна), т. е., что
сила, действующая со стороны пружины
на массу m, равна kx,
где х
— смещение
массы от положения равновесия, k
— коэффициент
упругости (сила тяжести для простоты
не принимается во внимание). Далее, пусть
при движении масса испытывает со стороны
окружающей среды сопротивление,
пропорциональное её скорости ![]() и
коэффициенту трения b,
т. е. равное k
(это
необходимо, чтобы система оставалась
линейной). Тогда уравнение движения
массы m при
наличии гармонической внешней силы F имеет
вид:
и
коэффициенту трения b,
т. е. равное k
(это
необходимо, чтобы система оставалась
линейной). Тогда уравнение движения
массы m при
наличии гармонической внешней силы F имеет
вид:
![]() (1), где F0 — амплитуда
колебания, w —
циклическая частота, равная 2p/Т, Т
— период
внешнего воздействия,
(1), где F0 — амплитуда
колебания, w —
циклическая частота, равная 2p/Т, Т
— период
внешнего воздействия, ![]() —ускорение
массы m. Решение
этого уравнения может быть представлено
в виде суммы двух решений. Первое из
этих решений соответствует свободным
колебаниям системы, возникающим под
действием начального толчка, а второе
— вынужденным колебаниям. Собственные
колебания в системе вследствие наличия
трения и сопротивления среды всегда
затухают, поэтому по истечении достаточного
промежутка времени (тем большего, чем
меньше затухание собственных колебаний)
в системе останутся одни только
вынужденные колебания. Решение,
соответствующее вынужденным колебаниям,
имеет вид:
—ускорение
массы m. Решение
этого уравнения может быть представлено
в виде суммы двух решений. Первое из
этих решений соответствует свободным
колебаниям системы, возникающим под
действием начального толчка, а второе
— вынужденным колебаниям. Собственные
колебания в системе вследствие наличия
трения и сопротивления среды всегда
затухают, поэтому по истечении достаточного
промежутка времени (тем большего, чем
меньше затухание собственных колебаний)
в системе останутся одни только
вынужденные колебания. Решение,
соответствующее вынужденным колебаниям,
имеет вид:
 ,
(2), причём tgj =
,
(2), причём tgj = ![]() .
Т. о., вынужденные колебания представляют
собой гармонические колебания с частотой,
равной частоте внешнего воздействия;
амплитуда и фаза вынужденных колебаний
зависят от соотношения между частотой
внешнего воздействия и параметрами
системы.
Зависимость амплитуды смещений при
вынужденных колебаниях от соотношения
между величинами массы m и
упругости k легче
всего проследить, полагая, что m и k остаются
неизменными, а изменяется частота
внешнего воздействия. При очень медленном
воздействии (w ® 0) амплитуда
смещений x0 » F0/k. С
увеличением частоты w амплитуда x0 растет,
т. к. знаменатель в выражении (2) уменьшается.
Когда w приближается к значению
.
Т. о., вынужденные колебания представляют
собой гармонические колебания с частотой,
равной частоте внешнего воздействия;
амплитуда и фаза вынужденных колебаний
зависят от соотношения между частотой
внешнего воздействия и параметрами
системы.
Зависимость амплитуды смещений при
вынужденных колебаниях от соотношения
между величинами массы m и
упругости k легче
всего проследить, полагая, что m и k остаются
неизменными, а изменяется частота
внешнего воздействия. При очень медленном
воздействии (w ® 0) амплитуда
смещений x0 » F0/k. С
увеличением частоты w амплитуда x0 растет,
т. к. знаменатель в выражении (2) уменьшается.
Когда w приближается к значению ![]() (т.
е. к значению частоты собственных
колебаний при малом их затухании),
амплитуда вынужденных колебаний
достигает максимума — наступает Резонанс Далее
с увеличением w амплитуда колебаний
монотонно убывает и при w ® ¥ стремится
к нулю.
(т.
е. к значению частоты собственных
колебаний при малом их затухании),
амплитуда вынужденных колебаний
достигает максимума — наступает Резонанс Далее
с увеличением w амплитуда колебаний
монотонно убывает и при w ® ¥ стремится
к нулю.
5/1 уществует еще один тип движения - волны. Волны - возмущения, распространяющиеся в пространстве с течением времени. Волны бывают механические и электромагнитные. Здесь нас интересуют только механические волны
Наличие упругой среды - необходимое условие распространения механических волн. Упругая среда - среда, в которой между частицами существуют силы, препятствующие ее деформации. Возмущение упругой среды - отклонение частиц этой среды от положения равновесия.

Если действие источника кратковременно, то возникает одиночная волна. Если источник продолжает действовать, то волны возникают одна за другой.