

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное образование учреждение среднего профессионального образования
«УФИМСКИЙ
ГОСУДАРСТВЕННЫЙ КОЛЛЕДЖ РАДИОЭЛЕКТРОНИКИ»
АКТУАЛЬНЫЕ ВОПРОСЫ ИНФОРМАЦИОННО-КОММУНИКАЦИОННЫХ И КОМПЬЮТЕРНЫХ ТЕХНОЛОГИЙ
V студенческая научно – практическая конференция

УФА 2010
Актуальные вопросы информационно-коммуникационных и компьютерных технологий: Материалы студенческой научно–практической конференции–29 июня 2010 года–Уфа: Издательство УГКР, 2010.– 64 с.
В сборник включены статьи и тезисы выступлений участников студенческой научно–практической конференции, посвященной актуальным вопросам информационно-коммуникационным и компьютерным технологиям.
Ответственный за выпуск Р.А.Ягафарова
© Уфимский государственный колледж радиоэлектроники, 2010
Разработка робота, идущего по линии
Безмельницын В.А., студент Уфимского государственного колледжа радиоэлектроники
Хакимова Г.Г. научный руководитель, преподаватель Уфимского государственного колледжа радиоэлектроники
До настоящего времени не выработано единой концепции относительно того, из чего же состоит робот. Например, в Японии роботом называется устройство, действующее по принципу взять-положить, т.е. простая «механическая рука», движения которой ограничены механическими упорами. Однако на Западе подобное устройство, не обладающее гибкостью, считается особым видом жесткого автомата, а не роботом.
Простейший робот может состоять лишь из одной микросхемы драйвера моторов и пары фотоэлементов. В зависимости от способа соединения моторов, микросхемы и фотоэлементов, можно «научить» робота двигаться на свет или, наоборот, прятаться в темноту, следовать за линией, или избегать ее. Если добавить в схему робота фототранзисторы и светодиоды, то можно добиться, чтобы он следовал за рукой и даже следовал по темной или светлой линии. Принцип поведения робота основывается на "фоторецепции" и является типичным для целого класса BEAM-роботов.
В настоящее время имеется уже множество различных направлений разработки, таких как создание эстетичных роботов, шагающих и катающихся роботов. Одним из примеров катающихся роботов является робот, идущий по линии. Робот, идущий по линии, двигается вслед за черной линией, что позволяет применять роботов такого класса для работ по перемещению предметов в соответствии с заданной траекторией.
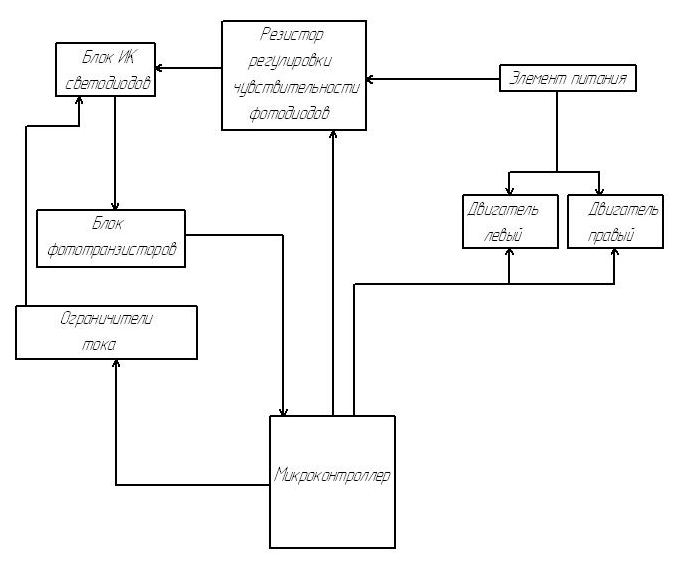
Рисунок 1 – Структурная схема робота, идущего по линии
Структурная схема робота, идущего по линии (рисунок 1), состоит из следующих блоков:
– микроконтроллер – анализирует работу блока ИК светодиодов и блока фототранзисторов, также управляет режимом работы двигателей;
– ограничители тока – контролируют максимальный ток выходов порта D микроконтроллера;
– блок ИК светодиодов - излучает сигналы, попадающие на поверхность с темной линией и отражающиеся от нее;
– блок фототранзисторов - принимает отраженный от поверхности сигнал и передает его микроконтроллеру;
– резистор регулировки чувствительности фотодиодов - отвечает за восприимчивость черной линии фотосенсорами;
– элемент питания 1 осуществляет питание схемы.

Рисунок 2 – Принципиальная схема робота, идущего по линии
На рисунке (3) представлена принципиальная схема робота, идущего по линии. Он собран на микроконтроллере фирмы ATMEL ATmega8L-8PU(DD1). В качестве ИК светодиодов используются L-53SRD-F, фототранзисторов - L-53P3C. ИК светодиоды (VD1,...,VD3) включаются на время, достаточное, чтобы АЦП, встроенный в МК, преобразовал напряжение, развиваемое соответствующими фототранзисторами (VT1,…,VT3) в цифровой код. Используются лишь восемь старших разрядов результата, т.к. два младших содержат шум. Если под датчиком нет темной линии, освещенность фототранзистора и напряжение на нем больше, если она есть – меньше. Сравнивая показания фототранзисторов с образцовым напряжением, снимаемым с резистора регулировки чувствительности (R4), программа принимает решение о положении робота относительно линии согласно следующим значениям:
000 – линия потеряна;
001 – смещение вправо;
010 – точно на линии;
011 – небольшое смещение вправо;
100 – смещение влево;
110 – небольшое смещение влево; 111 – не используется.
Далее происходит вызов подпрограммы в микроконтроллере, изменяющей режим работы двигателей (M1,M2) робота. Микроконтроллер работает от встроенного RC-генератора.
Ограничители тока (R1,…,R3) контролируют максимальный ток выходов порта D, который не должен превышать 20мА. Элемент питания G1, обеспечивает работу микроконтроллера и реализует работу двигателей и остальных элементов схемы.
Разработанный робот, идущий по линии, позволяет изучить основные характеристики и особенности микроконтроллеров семейства AVR, основы программирования этих микроконтроллеров. А также наглядно показать работу фотосенсоров. Знания о микроконтроллерах предоставляют возможность разрабатывать роботы от простых, до более сложных и многофункциональных устройств.
Преимуществом разработанного робота, идущего по линии, перед устройствами подобного назначения, является возможность его применения в различных областях. Основным достоинством разработанного робота является то, что он может перемещаться по заданной траектории, движение робота не зависит от наличия источника света, траекторию движения робота можно изменять, благодаря использованию микроконтроллера.