

Автомат регулирования скорости вращения вентиляторов и контроля температуры в пяти точках
Ефимов Е.Е., студент Уфимского государственного колледжа радиоэлектроники
Хакимова Г.Г., научный руководитель, преподаватель Уфимского государственного колледжа радиоэлектроники
Компьютеры с каждым днем все больше и больше входят в жизнь людей по всему миру. Образ классического «белого ящика», большого и шумного, давно остался в прошлом. Множество пользователей, которые имеют собственный компьютер, все больше внимания обращают на борьбу с шумом, издаваемым системным блоком. Причина тому довольно проста: в развитом урбанистическом обществе часто приходится работать по ночам в то время, когда кто-то из соседей по комнате уже спит, или же держать компьютер включенным целые сутки и самому постоянно находиться возле него.
Большинство материнских плат позволяют осуществлять мониторинг только температуры процессора, в то время как температура остальных, не менее важных элементов, остаётся неизвестна. При неисправности системы охлаждения, при повышении частоты процессора, системной шины или тонкой настройке оперативной памяти некоторые компоненты системы могут перегреться и выйти из строя. Также бывают ситуации, когда система некоторое время не используется и температура её компонентов снижается, в этом случае можно снизить скорость вращения охлаждающих вентиляторов для снижения энергопотребления и уровня шума. Автомат регулирования скорости вращения вентиляторов и контроля температуры в пяти точках (рисунок 1) предназначен для автоматического плавного регулирования скорости вращения вентиляторов, позволяет контролировать температуру в пяти точках и выводить полученное значение температуры на двухстрочный знакосинтезирующий жидкокристаллический индикатор.

Рисунок 1 – Лицевая панель автомата регулирования скорости вращения
вентиляторов и контроля температуры в пяти точках
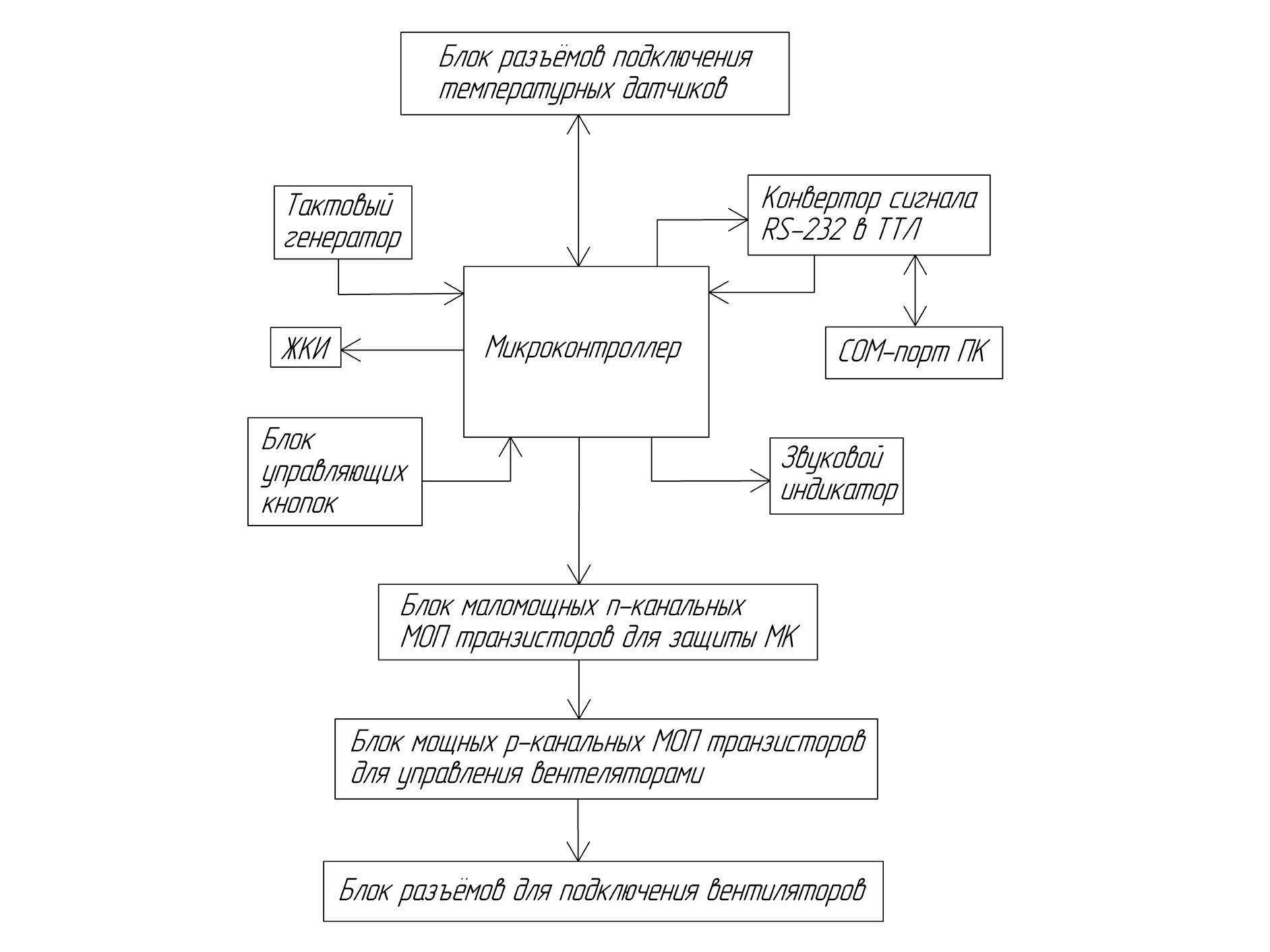
Рисунок 2 – Структурная схема автомата регулирования скорости
вращения вентиляторов и контроля температуры в пяти точках
Структурная схема автомата регулирования скорости вращения вентиляторов и контроля температуры в пяти точках (рисунок 2) состоит из следующих блоков:
микроконтроллер предназначен для управления всеми блоками устройства;
блок разъёмов подключения температурных датчиков представляет собой пять разъемов WF03. Служит для подключения температурных датчиков;
тактовый генератор служит для генерации тактовой частоты (20МГц) для микроконтроллера;
жидкокристаллический индикатор представляет собой знакосинтезирующий жидкокристаллический индикатор 16x2. Служит для отображения различной информации;
блок управляющих кнопок служит для управления настройками устройства;
конвертор сигналов RS-232 в ТТЛ предназначен для преобразования уровней сигналов RS-232 в ТТЛ-уровни. Используется при прошивке микроконтроллера;
звуковой индикатор сигнализирует о критической температуре (устанавливается пользователем) на одном из датчиков;
блок маломощных n-канальных МОП-транзисторов служит для более полного открывания мощных p-канальных МОП-транзисторов и исключения повреждения МК;
блок мощных p-канальных МОП-транзисторов предназначен для изменения скорости вращения вентиляторов;
блок разъёмов для подключения вентиляторов представляет собой пять разъёмов WF03. Служит для подключения вентиляторов.
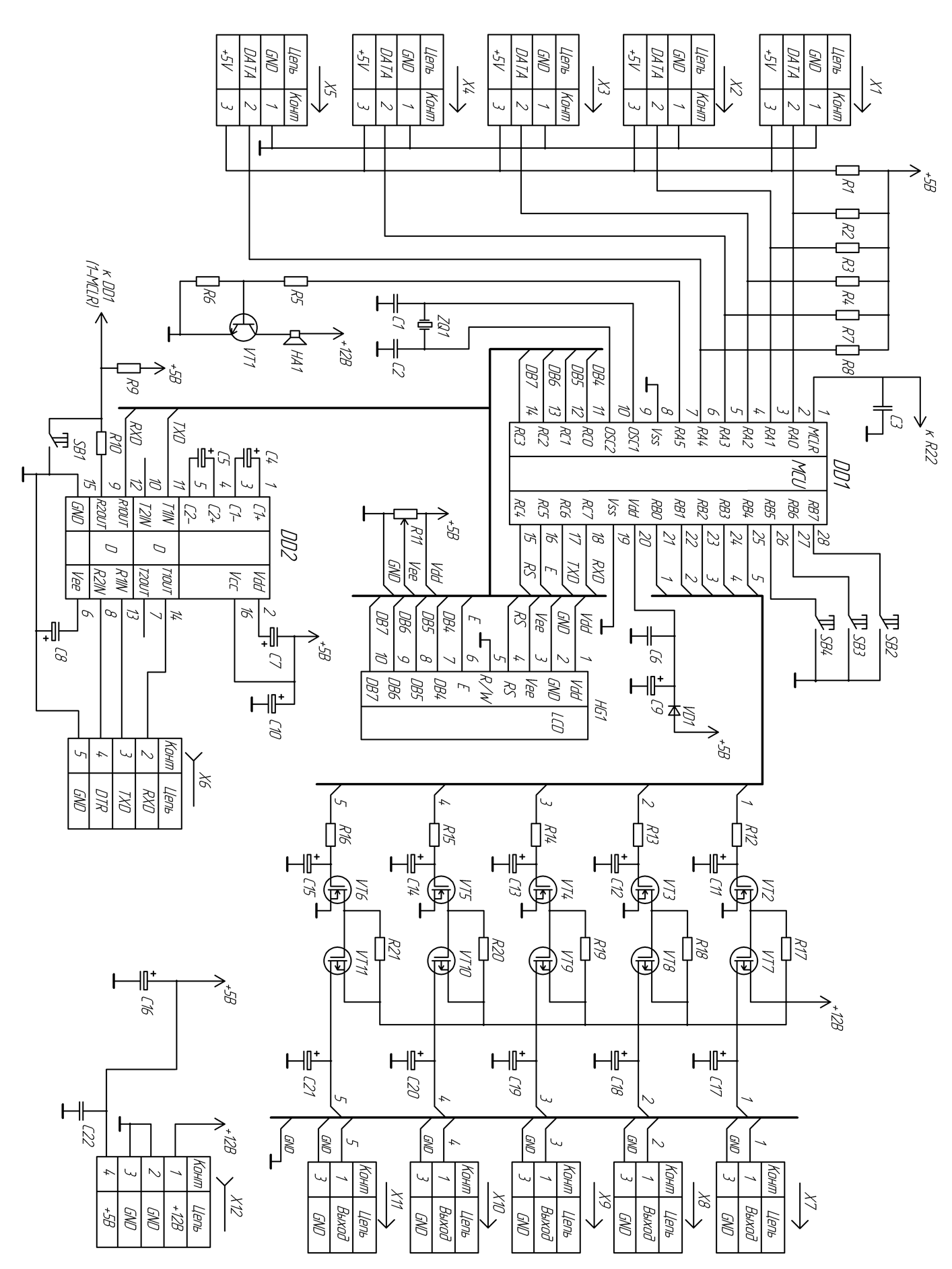
Рисунок 3 – принципиальная схема автомата регулирования скорости вращения вентиляторов и контроля температуры в пяти точках.
На рисунке (3) предствалена принципиальная схема автомата регулирования скорости вращения вентиляторов и контроля температуры в пяти точках. Он собран на микроконтроллере фирмы Microchip PIC16F876 (DD1). В качестве датчиков температуры используются цифровые датчики DS18B20, подключаемые к разъёмам WF-3 (X1,...,X5). Микроконтроллер изменяет частоту вращения вентиляторов, используя широтно-импульсную модуляцию. В качестве ключей управления вентиляторами используются мощные p-канальные МОП-транзисторы IRF9Z34N (VT7,...,VT11). Для более полного открывания и исключения повреждения микроконтроллера выходные транзисторы подключены к микроконтроллеру через маломощные n-канальные МОП-транзисторы 2N7000 (VT2,...,VT7).
При подаче напряжения питания с блока питания компьютера через разъём THP-4MR (Х12) запускается тактовый генератор (ZQ1) и начинает работать программа микроконтроллера. Через секунду после включения происходит инициализация знакосинтезирующего жидкокристаллического индикатора DV-16230 (HG1). Для надежного запуска двигателей вентиляторов на выходах RB0,…,RB4 микроконтроллера выставляется высокий уровень, происходит запуск вентиляторов, подключаемых к разъёмам WF-3 (Х7,...,Х11), полным напряжением питания 12В. Затем на индикаторе появляется название устройства, в это время микроконтроллер дает команду на преобразование температурным датчикам и на индикаторе появляется значение измеренной температуры, затем микроконтроллер, исходя из измеренной температуры и значений максимальной температуры, вычисляет период широтно-импульсной модуляции и подает на соответствующий выход вычисленную последовательность импульсов. Устройство начинает работать в рабочем режиме. Если на одном из датчиков зафиксирована температура, превышающая «температуру тревоги», то срабатывает электромагнитный излучатель звука HCM1212X (HA1).
Кнопка SB1 «Reset», служит для сброса микроконтроллера. Кнопки SB2,...,SB4 предназначены для настройки устройства. Кнопка SB2 отвечает за вход в меню (долгое нажатие) и перемещение по нему. Кнопками SB3 и SB4 производится увеличение и уменьшение отображаемого значения.
Микросхема MAX232CPE (DD2) является преобразователем уровней порта RS-232 (COM-порт) в ТТЛ уровни и обратно, и используется для внутрисхемного программирования микроконтроллера. Подключение устройства к COM-порту компьютера осуществляется с помощью разъема DRB9МА (Х6). THP-4MR(X12) – стандартный разъём питания.
Разработанный в данном дипломном проекте автомат регулирования скорости вращения вентиляторов и контроля температуры в пяти точках устанавливается в отсек 5,25 компьютера и позволяет автоматически плавно регулировать скорость вращения вентиляторов, а также контролировать температуру в пяти точках и выводить полученное значение температуры на двухстрочный знакосинтезирующий жидкокристаллический индикатор.
Разработка программы «Информационный ICQ Информер»
Кашапов Д.Р., студент Уфимского государственного колледжа радиоэлектроники
Бронштейн М.Е., научный руководитель, преподаватель Уфимского государственного колледжа радиоэлектроники
ICQ (переводится как: я ищу тебя) является централизованной и самой популярной службой мгновенного обмена сообщениями, в мире.
Для обмена сообщениями используются программы (клиенты). Бот (робот) — это подобие автоответчика, который в ответ на специальные команды выводит соответствующие сообщения, например: прогноз погоды, программу телепередач, курсы валют и т.д. Чтобы получить от бота нужную информацию, просто отправляется соответствующая команда, и бот присылает ответ. Работа с ботом ведется через любой (QIP) ICQ-клиент. Работа ничем не отличается от обмена сообщениями между реальными собеседниками. Боту отправляются сообщения от пользователя, с определенным текстом и моментально приходит на них ответ. Всё работает, просто, быстро и очень эффективно.
Целью разработки программы «Информационный ICQ Информер» является обеспечение, студентов, преподавателей, и родителей: расписанием, новостями, а так же актуальной информацией об успеваемости, средствами ICQ.
Программа была написана на языке PHP - это язык программирования, специально разработанный для написания web-приложений (сценариев), исполняющихся на Web-сервере.
Аббревиатура PHP означает “Hypertext Preprocessor (Препроцессор Гипертекста)". Синтаксис языка берет начало из C, Java и Perl. PHP достаточно прост для изучения. Преимуществом PHP является предоставление web-разработчикам возможности быстрого создания динамически генерируемых web-страниц и приложений.
Алгоритм программы «Информационный ICQ Информер» (рисунок 1) представлен основными компонентами: плагины, драйвер протокола icq, реализация протокола icq, драйвер базы данных, база данных.
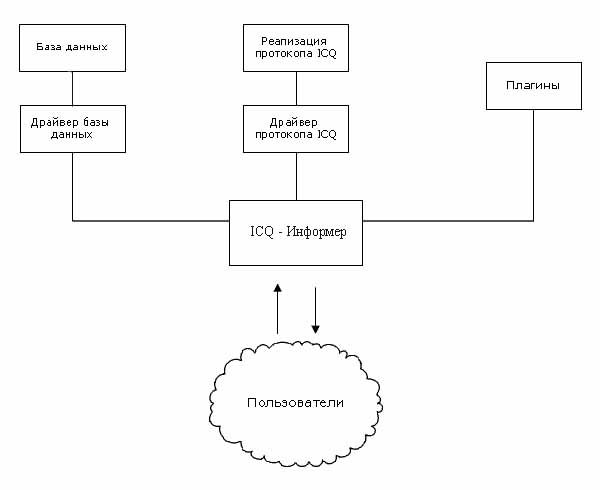
Он представляет из себя CLI-программу (набор скриптов), запускаемую в виде сервиса на операционной системе. После запуска бот подключается к IM-серверу, и принимает сообщения от других IM-пользователей, обрабатывая их в соответствии с заложенной в него программой и выдавая ответ.
Основным компонентом бота является ядро — набор скриптов, осуществляющих загрузку и управление другими компонентами — базой данных, драйвером протокола и плагинами. Ядро бота также содержит все вспомогательные классы для работы — логирование сообщений, механизм событий, взаимодействие между модулями, загрузка и выгрузка плагинов.
Бот взаимодействует с базой данных через специальный класс - адаптер — steelbotdb.
Данный класс отвечает за сохранение и извлечение всех данных — о командах, плагинах и пользователях. Также любой плагин может хранить в базе данных свою информацию, создав требуемые таблицы.
Компонент протокола IM — класс Proto isteelbotprotocol и отвечает за предоставление боту всех операций с IM протоколом (WebIcqPro): прием и отправка сообщений, добавление пользователей в контакт-лист, получение списка всех пользователей в контакт-листе, авторизация пользователей и так далее, в зависимости от спецификации IM-протокола. Бот одновременно может быть подключен только к одному протоколу IM с одной учетной записи.
Плагины — скрипты, которые позволяют неограниченно расширить функционал бота и добавить нужные команды для его работы. Каждый плагин представляет собой файл с расширением *.plugin.php и содержит набор функций, реализующих команды, а также операторы по экспорту этих команд в систему бота. Из плагина возможно взаимодействие с базой данных и IM-протколом, а также с настройками бота и другими установленными плагинами.
Работу бота можно рассмотреть на примере, плагина «Расписание» он обладает следующими возможностями:
- просмотр расписания для преподавателей;
- просмотр списка дней, на которые есть расписание;
-просмотр расписания для заданной группы на «сегодня», «завтра» и «послезавтра».
Получение расписания реализовано через запрос страниц по http протоколу на веб-сайт http://www.ugkr.ru и последующим анализом ответа с помощью регулярных выражений для выделения нужной информации.
Получение расписания:
1происходит запрос веб-страницы по адресу http:/www.ugkr.ru/student/rasp_t.php;
2 все полученное содержимое проходит через регулярное выражение;
~class=linkugkr href=(\S+?)>(\S+?)<~;
3 полученный массив представляет собой дни, которые есть на сайте;
4 далее, для каждого дня происходит запрос страницы, содержащий расписание групп на этот день по адресу http://www.ugkr.ru/student/rasp_t.php?act=3&date={$date}, где $date нужный день на который составлено расписание. Перед анализом ответа весь полученный контент переводится из кодировки сайта (windows-1251) в кодировку UTF-8.
Основные команды бота:
- сегодня - расписание на сегодня;
- завтра - расписание на завтра;
- послезавтра - расписание на послезавтра;
- инфо - на какие дни есть расписание;
- будни - расписание звонков с понедельника по пятницу;
- суббота - расписание звонков на субботу;
- помощь - подробная инструкция по использованию бота;
- ? - вывести помощь.
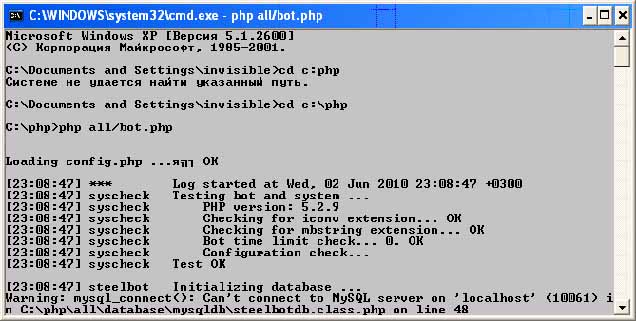
Рисунок 2 – Окно загрузки бота
Этапы загрузки:
1 процесс загрузки начинается с подключения файлов кодов ошибок, событий;
2 после этого происходит подключение стандартных файлов конфигурации;
3 проверка системы на наличие нужных библиотек и параметров операционной системы для работы бота (рисунок 2);
4 подключение к БД;
5 загрузка класса протокола WebICQPro;
6 загрузка плагинов.
Статистика:
- количество пользователей бота на 10.06.10 составило 645
- количество обработанных сообщений в день до 1000
- количество обработанных сообщений в неделю до 7000