

+1. Понятие системы автоматического управления, принципы управления, классификация САУ.
Система автоматического управления (САУ) включает в себя объект управления и устройство управления.
Управление - организация того или иного процесса на основе имеющейся информации, которая направлена на достижение определенной цели. ОУ (Объект управления) характеризуется входными (управляющими) координатами, а также переменными состояния.
Устройство управления — совокупность устройств, с помощью которых осуществляется управление входами объекта управления.
Цель управления – В каждый момент времени вектор выходных координат y должен быть равен заданному вектору y0: y → y0 при t→∞
Регулирование — частный случай управления, цель которого заключается в поддержании на заданном уровне одного или нескольких выходов объекта управления.
Регулятор — преобразует ошибку регулирования ε(t) в управляющее воздействие, поступающее на объект управления.
Задающее воздействие g(t) — определяет требуемый закон регулирования выходной величины.
Ошибка регулирования ε(t) = g(t) — y(t), разность между требуемым значением регулируемой величины и текущим её значением. Если ε(t) отлична от нуля, то этот сигнал поступает на вход регулятора, который формирует такое регулирующее воздействие, чтобы в итоге с течением времени ε(t) = 0.
Возмущающее воздействие f(t) — процесс на входе объекта управления, являющийся помехой управлению.
Системы автоматического управления:
• разомкнутые
• замкнутые
Функциональная схема элемента — схема системы автоматического регулирования и управления, составленная по функции, которую выполняет данный элемент.
Выходные сигналы — параметры, характеризующие состояние объекта управления и существенные для процесса управления.
Выходы системы — точки системы, в которых выходные сигналы могут наблюдаться в виде определенных физических величин.
Входы системы — точки системы, в которых приложены внешние воздействия.
Входные сигналы:
• помехи — сигналы, не связанные с источниками информации о задачах и результатах управления.
• полезные — сигналы, связанные с источниками информации о задачах и результатах управления.
Системы:
• одномерные — системы с одним входом и одним выходом.
• многомерные — системы с несколькими входами и выходами.
Виды воздействий. Переходная, весовая, передаточная функции
• Единичная ступенчатая функция — специальная математическая функция, чьё значение равно нулю для отрицательных аргументов и единице для положительных аргументов
• Единичная импульсная функция — производная от единичной ступенчатой функции. Характеризует собой импульс бесконечно-большой амплитуды, протекающий за бесконечно-малый промежуток времени. Геометрический смысл — площадь, ограниченная данной функцией, равна 1.
• Переходная функция — это реакция системы на единичный ступенчатый сигнал.
• Весовая функция — это реакция системы на единичный импульс.
• Передаточная функция — отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа входного при нулевых начальных условиях и нулевых внешних возмущениях; один из способов математического описания динамической системы.
Принципы управления САУ
Обратная связь — связь, при которой на вход регулятора подаётся действительное значение выходной переменной, а также заданное значение регулируемой переменной.
• жёсткая — такая ОС, при которой на вход регулятора поступает сигнал, пропорциональный выходному сигналу объекта в любой момент времени.
• гибкая — такая ОС, при которой на вход регулятора поступает не только сигнал, пропорциональный выходному сигналу объекта, но и сигнал пропорциональный, производным выходной переменной.
Управление по принципу отклонения управляемой переменной: — обратная связь образует замкнутый контур. На управляемый объект подаётся воздействие, пропорциональное сумме (разности) между выходной переменной и заданным значением так, чтобы эта сумма (разность) уменьшалась.

Управление по принципу компенсации возмущений: — на вход регулятора попадает сигнал, пропорциональный возмущающему воздействию. Отсутствует зависимость между управляющим воздействием и результатом этого действия на объект.

Управление по принципу комбинированного регулирования: — используется одновременно регулирование по возмущению и по отклонению, что обеспечивает наиболее высокую точность управления.
Алгоритм замкнутого процесса управления:
Получение инфы о задачах и целях упр-ия – планирование
Получение инфы о результатах упр-ия о состоянии ОУ на данный момент – анализ
Анализ полученной инфы и принятие решений
Иполнение принятого решения в виде к-нибудь перемещения и установления требуемого положения
Классификация САУ
По характеру управления:
системы управления
системы регулирования
По характеру действия:
системы непрерывного действия
системы дискретного действия
По степени использования информации о состоянии объекта управления:
управление с ОС
управление без ОС
По степени использования информации о параметрах и структуре объекта управления:
адаптивный
неадаптивный
поисковый
беспоисковый
с идентификацией
с переменной структурой
По степени преобразования координат в САУ:
детерминированный
стохастический (со случайными воздействиями)
По виду математической модели преобразования координат (используемые уравнения):
линейные
нелинейные (релейные, логические и др.)
По виду управляющих воздействий:
аналоговые
дискретные (прерывные, импульсные, цифровые)
По степени участия человека:
ручные
автоматические
автоматизированные (человек в управлении)
По закону изменения выходной переменной:
стабилизирующая: предписанное значение выходной переменной является неизменным.
программная: выходная переменная изменяется по определённой, заранее заданной программе.
следящая: предписанное значение выходной переменной зависит от значения неизвестной заранее переменной на входе автоматической системы.
По количеству управляемых и регулируемых переменных:
одномерные
многомерные
+2. Понятие звена САУ. Уравнения движения звеньев САУ. Линеаризация уравнений движения.
Звено – математическая модель системы или любой её части, определяемой некоторым оператором.
![]()
Уравнение динамики (дифференциальное уравнение движения звена САУ) – уравнение, описывающее процессы в звене при произвольных входных воздействиях. Уравнение описывает статический режим (статическая характеристика, уравнение статики) и связывает входную величину с выходной звена, когда все остальные величины постоянны (при установившихся внутренних процессах).
Пример: уравнение
![]() Пусть при постоянных воздействиях
Пусть при постоянных воздействиях
![]() процесс в звене установится. Тогда
производные обращаются в ноль и уравнение
принимает вид:
процесс в звене установится. Тогда
производные обращаются в ноль и уравнение
принимает вид:
![]()
Обобщённая (стандартная) формула
звена:
 , где
, где
 ,
,
 .
Дифференциальное уравнение 2-го порядка:
.
Дифференциальное уравнение 2-го порядка:
 →
→
 где
где
 ,
,
 ,
,
 ,
,
 , – коэффициент передачи линейного
звена
, – коэффициент передачи линейного
звена

Символическая (операторная) форма
записи звена
![]() .
Обозначение дифференциального оператора:
.
Обозначение дифференциального оператора:

![]() →
→
![]() →
→
![]() →
→
![]() Дифференциальный оператор при выходной
переменной называют собственным
оператором (
Дифференциальный оператор при выходной
переменной называют собственным
оператором (![]() ),
дифференциальный оператор при входной
переменной – оператором воздействия
(
),
дифференциальный оператор при входной
переменной – оператором воздействия
(![]() ).
).
Большинство САУ (динамические звенья)
описываются нелинейными дифференциальными
уравнениями:
 .
Но во многих случаях их можно линеаризовать.
Процесс преобразования нелинейных
уравнений в линейные называют
линеаризацией.
.
Но во многих случаях их можно линеаризовать.
Процесс преобразования нелинейных
уравнений в линейные называют
линеаризацией.
Линеаризация проводится, если в
окрестности некоторой рабочей точки
(![]() )
линеаризованная функция непрерывна.
Разложение в ряд Тейлора:
)
линеаризованная функция непрерывна.
Разложение в ряд Тейлора:
![]()
![]() Если
члены старших порядков отбросить, то
получаем:
Если
члены старших порядков отбросить, то
получаем:
![]() ,
или
,
или
![]() Отсюда:
Отсюда:
![]() .
Линеаризация проводится с погрешностью,
в окрестности некоторой (рабочей) точки.
.
Линеаризация проводится с погрешностью,
в окрестности некоторой (рабочей) точки.

+3. Пространство состояний. Уравнения движения звена в пространстве состояний. Канонические формы уравнений в пространстве состояний.
При исследовании динамических свойств САУ классическими методами после составления дифференциальных уравнений для отдельных элементов, обычно переходят к передаточным функциям этих элементов. Далее составляют общую структурную схему для всей системы, в которой отдельные элементы представляются блоками с соответствующими передаточными функциями. Затем определяется передаточная функция замкнутой системы.
Уравнения состояния САУ:
 – нормальная форма Коши, n
– переменный вектор состояния (порядок
системы n)
– нормальная форма Коши, n
– переменный вектор состояния (порядок
системы n)
Диагональная форма:

Характеристическое уравнение из уравнений состояния:


Система линейных дифференциальных уравнений (уравнения состояния звена):

x=
![]() =[n,1] – вектор состояния
системы,
=[n,1] – вектор состояния
системы,
y=
![]() =[n,1] – вектор выходных
величин,
=[n,1] – вектор выходных
величин,
u=
![]() =[m,1] – вектор внешних
воздействий (задающих и возмущающих),
=[m,1] – вектор внешних
воздействий (задающих и возмущающих),
A=
![]() =[n,n]
– собственная параметрическая матрица
системы,
=[n,n]
– собственная параметрическая матрица
системы,
B=
![]() =[n,m]
– входная матрица системы,
=[n,m]
– входная матрица системы,
C=
![]() =[k,n]
– выходная матрица системы
=[k,n]
– выходная матрица системы
Векторно-матричное уравнение
![]() ,
характеристическое уравнение
,
характеристическое уравнение
![]()
Система дифференциальных уравнений
![]() ,
характеристическое
,
характеристическое
![]()
Особый интерес представляют так называемые канонические формы (Каноническая фробениусова форма), в силу их простоты и непосредственной связи элементов матрицы состояния с коэффициентами характеристического уравнения. Наибольшую известность получили строчная управляемая и столбцовая наблюдаемая формы Фробениуса.
I) Каноническая форма уравнений состояния
 При этом передаточная функция не содержит
полиномов в числителе.
При этом передаточная функция не содержит
полиномов в числителе.
II) Каноническая форма управляемости (управляемое каноническое представление (УКП) – матрица С – произвольная, В – единичная)
(строчная каноническая форма, каноническая форма фазовых переменных)
Такое название связано с тем, что переменными состояния данной формы являются выходной сигнал и его производные. Эта форма удобна для синтеза модальных регуляторов.
Характеристическое уравнение матрицы
А:
![]() .
Предположим, что матрица управляемости
.
Предположим, что матрица управляемости
![]() не
вырождена
не
вырождена
Тогда существует такое преобразование, при котором преобразованная система имеет вид
Соответствующая передаточная функция системы, описываемой уравнениями состояния, имеет вид
|
 или в компактной форме
или в компактной форме
![]()
III) Каноническая форма наблюдаемости (наблюдаемое каноническое представление (НКП) – матрица В – произвольная, С – единичная)
(столбцовая каноническая форма, идентификационная каноническая форма)
Эта форма удобна для синтеза наблюдающих устройств и решения задач идентификации.
 или в компактной форме
или в компактной форме
![]()
Матрица Фробениуса (сопровождающая матрица своего характеристического многочлена)
– управляемое каноническое представление (УКП) – матрица С – произвольная, В – единичная
– наблюдаемое каноническое представление (НКП) – матрица В – произвольная, С – единичная
А = 0 0 0 0 0 -a0 1 0 0 0 0 -a1 0 1 0 0 0 -a2 0 0 1 0 0 -a3 0 0 0 1 0 -a4 0 0 0 0 1 -a5 |
Характеристическое уравнение из матрицы Фробениуса:

+4. Преобразование Лапласа для непрерывных функций и его свойства. Передаточная функция звена САУ. Связь передаточной функции с уравнениями движения звена.
Преобразование Лапласа – интегральное преобразование, связывающее функцию X(s) комплексного переменного (изображение) с функцией x(t) вещественного переменного (оригинал).
![]() ,
(производная переходит в оператор s=jw).
,
(производная переходит в оператор s=jw).
Таблица изображений Лапласа:
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передаточная функция звена САУ
 —
—
Один из способов математического описания динамической системы. Представляет собой дифференциальный оператор, отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа входного при нулевых начальных условиях и нулевых внешних возмущениях.
– оператор, позволяющий получить оператор выходного сигнала, зная оператор входного сигнала
– преобразование Лапласа импульсно-переходной
функции системы
 (т.е. весовой функции)
(т.е. весовой функции)
Пусть
![]() —
входной сигнал линейной стационарной
системы, а
—
входной сигнал линейной стационарной
системы, а
![]() —
её выходной сигнал. Тогда передаточная
функция
—
её выходной сигнал. Тогда передаточная
функция
![]() такой системы записывается в виде:
такой системы записывается в виде:
![]() ,
где
,
где
![]() и
и
![]() —
преобразования Лапласа для сигналов
и
соответственно:
—
преобразования Лапласа для сигналов
и
соответственно:
![]() ,
,
![]() .
.
+5. Частотные и временные характеристики звена, САУ.
I) Весовая
функция (импульсно-переходная функция)
– реакция системы на бесконечно малый
импульс
 ,
бесконечно большой амплитуды
,
бесконечно большой амплитуды![]()
 ,
,


(Единичная импульсная функция — производная от единичной ступенчатой функции. Характеризует собой импульс бесконечно-большой амплитуды, протекающий за бесконечно-малый промежуток времени. Геометрический смысл — площадь, ограниченная данной функцией, равна 1)
II) Переходная
функция звена (временная
характеристика звена)
 – реакция на единичное ступенчатое
воздействие при нулевых начальных
условиях
– реакция на единичное ступенчатое
воздействие при нулевых начальных
условиях![]()
(Единичная ступенчатая функция — специальная математическая функция, чьё значение равно нулю для отрицательных аргументов и единице для положительных аргументов)
 ,
,
 ,
,

 – оператор Лапласа,
– оператор Лапласа,

Показатели качества переходной САУ: время регулирования, перерегулирование (%)
Установившееся значение переходного
процесса –

III) Частотные характеристики звена – формулы и графики, показывающие как система реагирует на гармонический сигнал (характеризующие реакцию звена на синусоидальное входное воздействие) в установившемся режиме;
Получение из передаточной функции:
на входе:
 на выходе:
на выходе:

 ,
,
 ,
,

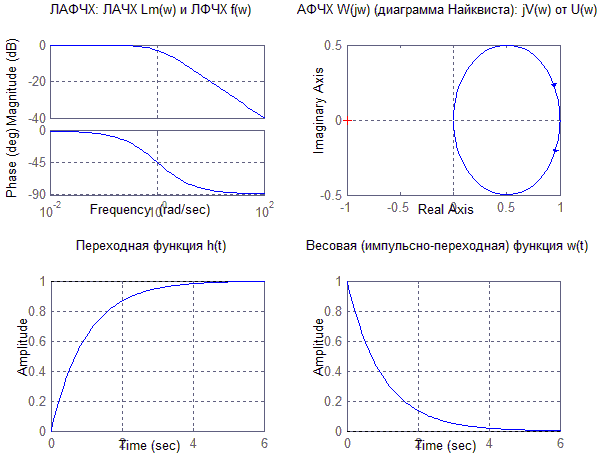
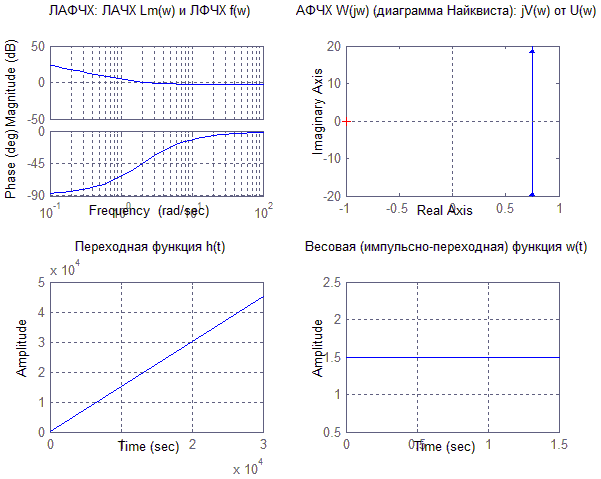
• АЧХ: |W(jω)| от ω
• ФЧХ: arg{W(jω)}=φ(ω) от ω (частотная зависимость разности фаз между выходным и входным сигналами, tan(φ)=Im{W(jω)}/Re{W(jω)})
• АФЧХ разомкнутой системы (диаграмма Найквиста, годограф Михайлова, частотный отклик): зависимость Im{W(jω)}=jV(ω) от Re{W(jω)}=U(ω) (частота выступает в качестве параметра кривой, фаза и амплитуда системы на заданной частоте представляется углом и длиной радиус-вектора каждой точки характеристики)
• ЛАФЧХ: ЛАЧХ: Lm(ω) и ЛАФХ: φ(ω)
(эти графики приведены в пункте 6)
+6. Типы линейных звеньев САУ и их характеристики.
Основные типовые звенья и их характеристики (W(s)=W(jω)):
Позиционные
|
|||||||||
• идеальное
(безынерционное, пропорциональное,
элементарный усилитель)
|
• апериодическое
1-го порядка
|
• апериодическое
2-го порядка (инерционное)
|
• колебательное
|
• осциллятор
(генератор синусоидальных колебаний,
консервативное звено)
|
|||||
Дифференцирующие
|
|||||||||
• идеальное
|
• реальное (с
замедлением)
|
• форсирующее
1-го порядка
|
• форсирующее
2-го порядка
|
||||||
Интегрирующие
|
|||||||||
• идеальное
|
• реальное (c
замедлением)
|
• изодромное
|
|||||||

 ,
,


 ,
,

 ,
,

 ,
,
 ,
,


 ,
,
 ,
,




 ,
,


 ,
,


 ,
,


 ,
,
 ,
,



 ,
,


 ,
,


 ,
,
 ,
,
+7. Понятие структурной схемы САУ. Структурные преобразования.
Структурная схема – это изображение системы управления в виде совокупности динамических звеньев с указанием связей между ними;
Структурная схема САУ может быть составлена на основе известных уравнений системы, и, наоборот, уравнения системы могут быть получены из структурной схемы. Однако первая задача может иметь различные варианты решения, тогда как вторая задача имеет всегда единственное решение.
Элементы структурных схем (базовые элементы для построения структурной схемы САУ):
• Звено с одним входом
|
• Звено с двумя входами
|
• Узел (разветвление) |
• Сумматор
|
• Элемент сравнения (аналог сумматора)
|
Простейшие сочетания динамических звеньев системы автоматического управления:
• Последовательное
|
• Параллельное
|
• Обратная связь САУ с положительной
ОС:
|
• Обратная связь САУ с отрицательной
ОС:
|
 Уравнение
выхода будет иметь вид:
Уравнение
выхода будет иметь вид:
 Уравнение
выхода будет иметь вид:
Уравнение
выхода будет иметь вид:
 Уравнение
выхода будет иметь вид:
Уравнение
выхода будет иметь вид:
Правила преобразования структурных и линейных систем (Преобразование структурной схемы к удобному виду представляется возможным благодаря гибкости структурных схем. Ниже приведена таблица эквивалентных преобразований структурных схем):
Операция |
Исходная схема |
Эквивалентная схема |
Перестановка сумматоров или элементов сравнения |
|
|
Перестановка звеньев |
|
|
Перенос узла с выхода на вход сумматора |
|
|
Перенос узла с входа на выход сумматора |
|
|
Перенос узла с выхода на вход звена |
|
|
Перенос узла с входа на выход звена |
|
|
Перенос сумматора с выхода на вход звена |
|
|
Перенос сумматора с входа на выход звена |
|
|
Замена звеньев прямой и обратной цепей |
|
|
Переход к единичной обратной связи |
|
|



