

4 Методические указания
Для составления функциональной схемы САР необходимо выделить функциональные элементы системы, определить их входные и выходные параметры и взаимосвязь этих элементов.
Например, электродвигатель изображается следующим образом (рисунок 2).
На рисунке 2 приняты следующие обозначения: МС – момент, создаваемый приводным механизмом и тормозящий двигатель, который является возмущающим воздействием на САР. Потенциометр как пропорциональное звено, преобразующее UП в U0 с коэффициентом пропорциональности kТ, на функциональной схеме будет выглядеть, как показано на рисунке 3.
Аналогично потенциометру изображаются усилитель, возбудитель, генератор и тахогенератор. Нуль-орган изображается в виде сумматора сигналов U0 и -UТ (Рисунок 4).

Заштрихованный сектор показывает, что значение параметра, входящего в него, вычитается.
Учитывая, что входным параметром САР является UП , а выходным n , что обратная связь в системе осуществляется через тахогенератор, соединив элементы между собой, можно получить функциональную схему САР.
Для построения структурной схемы САР необходимо каждый ее функциональный элемент рассматривать как звено с передаточной функцией W, умножением входного параметра на которую получается выходной параметр. Поскольку звенья структурной схемы могут иметь только один вход и один выход, двигатель надо представлять в виде двух звеньев. Входным параметром одного из звеньев будет UГ , выходным - n , а входным параметром другого звена – МС , выходным будет – минус n. Знак минус перед n означает уменьшение оборотов от действия тормозящего момента. Тогда структурная схема САР может быть построена по принципу схемы, изображенной на рисунке 5.

На рисунке 5 UX –выходная величина второго звена.
Переходные функции звеньев находят из дифференциальных уравнений, описывающих работу соответствующих функциональных элементов системы, поделив выходной параметр на входной.
Рассмотрим получение переходных функций на примере двигателя – самого сложного элемента системы. Дифференциальное уравнение, описывающее работу двигателя, дано в описании системы и имеет вид
.
Преобразуем
дифференциальное уравнение в операторное,
применив преобразование Лапласа при
нулевых начальных условиях, тогда знак
производной заменится оператором
![]() ,
а при преобразовании в частотный вид,
т.е. изображении в форме Фурье при нулевых
начальных условиях, можно произвести
замену:
,
а при преобразовании в частотный вид,
т.е. изображении в форме Фурье при нулевых
начальных условиях, можно произвести
замену:
![]() .
В операторной форме уравнение примет
вид
.
В операторной форме уравнение примет
вид
![]() .
.
Условно двигатель состоит из двух звеньев. Для первого звена переходная функция WД1 находится при условии, что тормозящий момент отсутствует, т.е. для этого звена МС = 0; для второго звена переходная функция WД2 определяется при отсутствии напряжения генератора, т.е. UГ = 0.
Тогда
для получения WД1
останется уравнение
![]() .
Вынесем n
за скобки:
.
Вынесем n
за скобки:
![]() и найдем
и найдем
![]() а для получения WД2
останется уравнение
а для получения WД2
останется уравнение
![]() .
Произведя аналогичные преобразования,
находим
.
Произведя аналогичные преобразования,
находим
![]()
Подобным образом получаются переходные функции других звеньев.
Определение передаточных функций разомкнутой и замкнутой системы возможно путем преобразований структурной схемы САР. Для последовательно соединенных звеньев передаточная функция находится путем перемножения передаточных функций этих звеньев. Например, для прямой ветви (без обратной связи) схемы, изображенной на рисунке 5, при возмущении со стороны задатчика Wп=W1∙W2∙W3 .
 Преобразование
схемы с обратной связью (ОС) показано
на рисунке 6.
Преобразование
схемы с обратной связью (ОС) показано
на рисунке 6.
При
этом
![]()
В случае положительной обратной связи знак «+» в знаменателе выражения меняется на знак « – ».
Перестановка узла суммирования через звено против хода сигнала (а) и по ходу сигнала (б) показана на рисунке 7.
Другие преобразования структурных схем можно посмотреть в учебных пособиях [1, 2]. Свернув структурную схему сначала разомкнутой, а потом замкнутой системы (при возмущении со стороны тормозящего момента) в одно звено, получим передаточные функции этих звеньев. Необходимо помнить, что влияние задатчика при этом не учитывается, т.е. считается равным нулю, поскольку мы исследуем влияние тормозящего момента на замкнутую и разомкнутую системы.
Рассчитать и построить статические характеристики разомкнутой и замкнутой системы можно двумя способами. Первый способ – с помощью преобразованных выше схем и их передаточных функций, второй – составлением и решением алгебраических уравнений, описывающих статический режим разомкнутой и замкнутой системы.
Статический режим – это режим работы системы, при котором никакие сигналы в системе не изменяются во времени. Статические характеристики описывают работу системы в установившихся режимах, т.е. после того как прошел переходный процесс. Поскольку дифференцирование констант дает ноль, то при получении статических характеристик в переходных функциях оператор р можно приравнять нулю, а в дифференциальных уравнениях, описывающих звенья системы, можно приравнять нулю все слагаемые, содержащие производные. В нашем случае статической характеристикой системы будет ее механическая характеристика. Исполнительным органом системы является двигатель постоянного тока с независимым возбуждением. Зависимость скорости вращения якоря от момента на валу такого двигателя линейная. Для построения механических характеристик разомкнутой и замкнутой системы (рисунок 8) необходимо определить в каждом случае две точки. Первой точкой для обеих зависимостей будет точка при МС=0, nо – скорость вращения двигателя заданная. Вторые точки необходимо рассчитать при заданном МС для разомкнутой и замкнутой системы управления, т.е. без ОС и с ОС. Строить статические характеристики лучше на одном графике для удобства сравнения, а статические ошибки регулирования определять при заданном моменте на валу двигателя МС для разомкнутой и замкнутой системы. Абсолютная статическая ошибка n=n0-n, а относительная статическая ошибка δ= n/ n0.
Амплитудно-фазовую частотную характеристику (АФЧХ), или годограф комплексного коэффициента усиления разомкнутой системы, строим следующим образом. Находим передаточную функцию прямой ветви системы при возмущении со стороны задатчика и преобразуем ее в частотный вид, заменяя p на jω. Разделяем действительную и мнимую часть: W(jω)=U(ω)+jV(ω). Точки годографа получаем, подставляя различные частоты (от 0 до ) и находя для этих частот вещественную и мнимую часть комплексного коэффициента усиления (рисунок 9).
На рисунке 9 U – вещественная ось; jV – мнимая ось; φ2 – угол сдвига фазы при частоте ω2.
Годограф – это след от перемещения конца вектора по амплитуде, равного коэффициенту усиления разомкнутой системы для данной частоты входного сигнала.
При построении АФЧХ особое внимание следует обратить на точки пересечения годографа с вещественной осью U. Эти точки можно найти, приравняв мнимую часть нулю, определить частоты, при которых годограф пересечет вещественную ось. После этого подставить полученные частоты в вещественную часть комплексного коэффициента усиления. Для построения АФЧХ достаточно просчитать 7 - 10 точек.
Логарифмические амплитудно-частотную (ЛАЧХ) и фазо-частотную (ЛФЧХ) характеристики будем строить с помощью асимптотических характеристик звеньев. В прямой ветви нашей системы при возмущении со стороны задатчика пять звеньев: два пропорциональных (безынерционных усилительных) звена и три апериодических (инерционных) звена первого порядка. Поэтому ЛАЧХ и ЛФЧХ будут выглядеть подобно показанным на рисунке 10.
Каждое инерционное звено первого порядка увеличивает наклон асимптотической ЛАЧХ на 20 децибел на декаду от частот сопряжения ωc =1/Т, где Т– постоянная времени соответствующего инерционного звена. Ось частот отградуирована в логарифмическом масштабе, поэтому откладывать по оси следует промежуток, равный lg ω, относительно ω=1, т.к. lg 1=0. Декада – это промежуток, соответствующий увеличению частоты в десять раз. До первой частоты сопряжения ωc1 идет прямолинейный участок, параллельный оси частот и равный 20 lg К в децибелах, где К – общий коэффициент усиления всех звеньев прямой ветви, равный произведению коэффициентов усиления звеньев, составляющих эту ветвь. ЛФЧХ строится как сумма ЛФЧХ трех инерционных звеньев первого порядка φ1, φ 2 и φ 3, т. к. безынерционные усилительные звенья не являются фазовращающими. В точках частот сопряжения φ1, φ 2 и φ 3 пересекают ось, соответствующую 45. В качестве проверки правильности построения ЛФЧХ можно найти частоту, при которой ЛФЧХ пересекает ось 180. Эта частота должна быть равна частоте, при которой АФЧХ пересекает отрицательную часть вещественной оси.
Основной динамической характеристикой системы автоматического регулирования является ее устойчивость. Различают три основных случая реакции систем на возмущающее воздействие:
система не приходит в равновесное состояние, а управляемая величина все больше отклоняется от заданного значения. В этом случае система является неустойчивой, а переходный процесс – расходящимся;
система приходит к равновесному состоянию, при этом управляемая переменная отличается от заданного значения на величину статической погрешности системы. Переходный процесс будет сходящимся, а система – устойчивой;
система приходит в установившееся периодическое движение. Переходный процесс при этом называется незатухающим колебательным, а система находится на границе асимптотической устойчивости.
Для определения устойчивости САР найдены критерии устойчивости, которые можно разделить на алгебраические и частотные [1, 2]. Устойчивость нашей системы будем определять по частотному критерию Найквиста. Критерий основан на анализе АФЧХ разомкнутой системы. В нашем случае, когда АФЧХ имеет в левой полуплоскости только один корень, критерий Найквиста можно сформулировать следующим образом. Для того чтобы система была устойчива в замкнутом состоянии, необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении частоты от 0 до не охватывала точку с координатами (-1, j0).
Анализ удобно проводить отдельно, построив АФЧХ вблизи этой точки (-1, j0), как показано на рисунке 11.
Устойчивая система характеризуется запасом устойчивости по амплитуде А и запасом устойчивости по фазе , который определяется как угол между вектором, направленным в точку пересечения АФЧХ с единичной окружностью, и отрицательной частью вещественной оси.
Критерий устойчивости Найквиста можно применить и для логарифмических частотных характеристик. Для нашей одноконтурной системы критерий можно сформулировать следующим образом. Замкнутая система будет устойчива, если ЛАЧХ разомкнутой системы пересекает ось абсцисс при меньшей частоте, чем ЛФЧХ пересекает линию, соответствующую минус 180. Запасы устойчивости А и определяются, как показано на рисунке 10.
Приводить систему к устойчивому состоянию, если она оказалась неустойчивой, удобнее, анализируя логарифмические характеристики. ЛАЧХ будет пересекать ось абсцисс при меньшей частоте, если уменьшить общий коэффициент усиления прямой ветви К за счет коэффициента усиления усилителя kу. Добиться устойчивости системы можно, увеличивая постоянную времени возбудителя Тв, тогда ωс=1/Тв уменьшится. Уменьшать kу или увеличивать Тв следует до тех пор, пока ЛАЧХ не станет пересекать ось абсцисс раньше, чем ЛФЧХ – минус 180, с нужным запасом устойчивости.
Составление передаточной функции замкнутой системы при возмущении со стороны задатчика выполняется по уже известным преобразованиям структурной схемы САР.
Для расчета и построения вещественной частотной характеристики замкнутой системы выделим в полученной передаточной функции вещественную часть, отделив ее от мнимой части, после применения частотного преобразования. Такие преобразования уже делались с передаточной функцией разомкнутой системы при построении АФЧХ.
Подставляя в полученную вещественную часть частоты, находим точки вещественной частотной характеристики (ВЧХ) замкнутой системы, которая будет выглядеть аналогично вещественной характеристике, изображенной на рисунке 12.
Переходную характеристику замкнутой системы будем строить методом трапеций на основе вещественной частотной характеристики. Для этого разобьем ее на трапеции. При этом, чем точнее суммарная площадь трапеций приближается к площади, ограниченной кривой P(ω), тем точнее будет построена характеристика переходного процесса. В учебных целях ВЧХ достаточно разбить на четыре трапеции. Для примера разобьем ВЧХ, изображенную на рисунке 12, на три трапеции, как показано на рисунке 13.
Для каждой трапеции определим высоту P1(0), P2(0), P3(0), интервал равномерного пропускания ωn1, ωn2, ωn3, предельную частоту ω1, ω2, ω3 и коэффициент наклона æ1= ωn1/ω1, æ2=ωn2/ω2, æ3=ωn3/ω3. По каждой трапеции рассчитываем составляющую переходного процесса (таблица 2).
Таблица 2 – Составляющие переходного процесса
P1=1,99; ω1=6; æ1=0,73 |
P2=0,53; ω2=20; æ2=0,35 |
P3=0,46; ω3=2,8; æ3=0,36 |
|||||||||
|
h11() |
t=/ω1 |
h1(t) |
|
h21() |
t=/ ω2 |
h2(t) |
|
h31() |
t=/ ω3 |
h3(t) |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0,5 |
0,27 |
0,083 |
0,54 |
2,0 |
0,76 |
0,1 |
0,403 |
1,0 |
0,42 |
0,36 |
0,19 |
1,0 |
0,53 |
0,17 |
1,05 |
4,0 |
1,09 |
0,2 |
0,58 |
2,0 |
0,77 |
0,72 |
0,35 |
2,0 |
0,93 |
0,33 |
1,86 |
6,0 |
1,07 |
0,3 |
0,57 |
3,0 |
0,99 |
1,07 |
0,46 |
3,5 |
1,17 |
0,58 |
2,33 |
8,0 |
1,01 |
0,4 |
0,53 |
4,0 |
1,09 |
1,43 |
0,5 |
5,0 |
1,1 |
0,83 |
2,19 |
13 |
0,98 |
0,65 |
0,52 |
5,0 |
1,1 |
1,78 |
0,5 |
7,0 |
0,92 |
1,16 |
1,83 |
16 |
0,99 |
0,8 |
0,53 |
6,0 |
1,07 |
2,14 |
0,49 |
9,0 |
0,96 |
1,5 |
1,95 |
18 |
1,0 |
0,9 |
0,53 |
7,0 |
1,03 |
2,5 |
0,47 |
11,0 |
1,04 |
1,83 |
2,08 |
23 |
1,01 |
1,15 |
0,535 |
8,0 |
1,01 |
2,86 |
0,46 |
Первые два столбца таблицы 2 для каждой трапеции заполняются из справочной таблицы h-функций трапеций с единичной высотой (таблица 3), куда сведены значения h-функций в зависимости от коэффициента наклона æ и времени в относительных единицах . Выбирать значения h из таблицы следует до установившегося постоянного значения h, либо до конца справочной таблицы. Шаг следует выбрать таким, чтобы можно было построить колебательный переходный процесс. В третий столбец проставляется реальное время в секундах, рассчитанное по формуле t = /ωi , где ωi – предельная частота i-й трапеции. В четвертый столбец вносятся значения h-функции, соответствующие ординатам переходного процесса для данной трапеции. Например, для первой трапеции эти значения рассчитываются по формуле h 1(t) =P1h11().
Таблица 3 – Таблица h-функций для трапецеидальных вещественных частотных характеристик
|
Значения h-функций для æ |
|||||||||
0,0 |
0,05 |
0,10 |
0,15 |
0,20 |
0,25 |
0,30 |
0,35 |
0,40 |
0,45 |
|
0,0 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,5 |
0,138 |
0,165 |
0,176 |
0,184 |
0,192 |
0,199 |
0,207 |
0,215 |
0,233 |
0,231 |
1,0 |
0,310 |
0,325 |
0,340 |
0,356 |
0,371 |
0,386 |
0,402 |
0,417 |
0,432 |
0,447 |
1,5 |
0,449 |
0,469 |
0,494 |
0,516 |
0,538 |
0,560 |
0,594 |
0,603 |
0,617 |
0,646 |
2,0 |
0,571 |
0,560 |
0,628 |
0,655 |
0,682 |
0,709 |
0,732 |
0,761 |
0,785 |
0,810 |
2,5 |
0,674 |
0,707 |
0,739 |
0,771 |
0,802 |
0,833 |
0,862 |
0,891 |
0,917 |
0,943 |
3,0 |
0,755 |
0,792 |
0,828 |
0,863 |
0,895 |
0,928 |
0,958 |
0,986 |
1,013 |
1,038 |
3,5 |
0,815 |
0,853 |
0,892 |
0,928 |
0,963 |
0,994 |
1,024 |
1,050 |
1,074 |
1,095 |
4,0 |
0,856 |
0,898 |
0,937 |
0,974 |
1,008 |
1,039 |
1,066 |
1,090 |
1,110 |
1,127 |
4,5 |
0,883 |
0,923 |
0,960 |
0,998 |
1,029 |
1,057 |
1,084 |
1,104 |
1,120 |
1,129 |
5,0 |
0,895 |
0,939 |
0,977 |
1,012 |
1,042 |
1,067 |
1,087 |
1,102 |
1,112 |
1,117 |
5,5 |
0,900 |
0,940 |
0,986 |
1,015 |
1,042 |
1,063 |
1,079 |
1,088 |
1,092 |
1,096 |
6,0 |
0,903 |
0,945 |
0,981 |
1,013 |
1,037 |
1,054 |
1,065 |
1,070 |
1,068 |
1,062 |
6,5 |
0,904 |
0,943 |
0,980 |
1,009 |
1,029 |
1,043 |
1,050 |
1,049 |
1,043 |
1,033 |
7,0 |
0,904 |
0,945 |
0,978 |
1,006 |
1,024 |
1,034 |
1,037 |
1,033 |
1,023 |
1,009 |
7,5 |
0,907 |
0,945 |
0,980 |
1,005 |
1,021 |
1,027 |
1,027 |
1,020 |
1,005 |
0,989 |
8,0 |
0,911 |
0,951 |
0,983 |
1,007 |
1,020 |
1,024 |
1,021 |
1,011 |
0,998 |
0,982 |
8,5 |
0,918 |
0,956 |
0,989 |
1,010 |
1,021 |
1,024 |
1,018 |
1,007 |
0,993 |
0,978 |
9,0 |
0,925 |
0,966 |
0,996 |
1,016 |
1,025 |
1,025 |
1,017 |
1,006 |
0,992 |
0,978 |
9,5 |
0,932 |
0,972 |
1,004 |
1,020 |
1,028 |
1,026 |
1,018 |
1,006 |
0,993 |
0,982 |
10,0 |
0,939 |
0,980 |
1,009 |
1,025 |
1,030 |
1,027 |
1,018 |
1,005 |
0,994 |
0,985 |
10,5 |
0,946 |
0,985 |
1,013 |
1,028 |
1,031 |
1,026 |
1,016 |
1,004 |
0,994 |
0,989 |
11,0 |
0,947 |
0,988 |
1,015 |
1,028 |
1,030 |
1,024 |
1,013 |
1,002 |
0,993 |
0,990 |
Продолжение таблицы 3
|
Значения h-функций для æ |
||||||||||
0,0 |
0,05 |
0,10 |
0,15 |
0,20 |
0,25 |
0,30 |
0,35 |
0,40 |
0,45 |
||
11,5 |
0,949 |
0,988 |
1,016 |
1,027 |
1,028 |
1,021 |
1,010 |
0,998 |
0,991 |
0,991 |
|
12,0 |
0,950 |
0,990 |
1,015 |
1,025 |
1,024 |
1,015 |
1,004 |
0,994 |
0,988 |
0,990 |
|
12,5 |
0,950 |
0,989 |
1,013 |
1,002 |
1,019 |
1,010 |
0,998 |
0,990 |
0,986 |
0,989 |
|
13,0 |
0,950 |
0,989 |
1,012 |
1,019 |
1,015 |
1,004 |
0,993 |
0,986 |
0,984 |
0,989 |
|
13,5 |
0,950 |
0,990 |
1,011 |
1,016 |
1,011 |
1,000 |
0,990 |
0,983 |
0,984 |
0,989 |
|
14,0 |
0,951 |
0,990 |
1,010 |
1,015 |
1,008 |
0,997 |
0,987 |
0,983 |
0,985 |
0,991 |
|
14,5 |
0,954 |
0,990 |
1,011 |
1,014 |
1,008 |
0,996 |
0,986 |
0,984 |
0,987 |
0,994 |
|
15,0 |
0,956 |
0,993 |
1,012 |
1,014 |
1,006 |
0,995 |
0,987 |
0,986 |
0,991 |
0,998 |
|
15,5 |
0,959 |
0,995 |
1,013 |
1,014 |
1,006 |
0,995 |
0,989 |
0,989 |
0,995 |
1,002 |
|
16,0 |
0,961 |
0,998 |
1,015 |
1,014 |
1,006 |
0,995 |
0,990 |
0,992 |
0,999 |
1,007 |
|
16,5 |
0,964 |
0,999 |
1,016 |
1,015 |
1,005 |
0,996 |
0,992 |
0,995 |
1,002 |
1,009 |
|
17,0 |
0,965 |
1,001 |
1,016 |
1,014 |
1,005 |
0,996 |
0,993 |
0,998 |
1,005 |
1,011 |
|
17,5 |
0,966 |
1,002 |
1,016 |
1,013 |
1,003 |
0,995 |
0,994 |
0,999 |
1,007 |
1,011 |
|
18,0 |
0,966 |
1,002 |
1,015 |
1,012 |
1,002 |
0,994 |
0,994 |
1,000 |
1,007 |
1,010 |
|
18,5 |
0,966 |
1,001 |
1,014 |
1,010 |
1,000 |
0,993 |
0,994 |
1,001 |
1,007 |
1,009 |
|
19,0 |
0,996 |
1,002 |
1,013 |
1,008 |
0,998 |
0,992 |
0,994 |
1,001 |
1,006 |
1,006 |
|
19,5 |
0,967 |
1,001 |
1,012 |
1,006 |
0,996 |
0,991 |
0,994 |
1,001 |
1,005 |
1,004 |
|
20,0 |
0,967 |
1,001 |
1,011 |
1,004 |
0,995 |
0,991 |
0,994 |
1,001 |
1,004 |
1,001 |
|
20,5 |
0,968 |
1,002 |
1,010 |
1,003 |
0,994 |
0,991 |
0,995 |
1,001 |
1,003 |
1,000 |
|
21,0 |
0,968 |
1,002 |
1,010 |
1,003 |
0,994 |
0,991 |
0,996 |
1,002 |
1,003 |
0,999 |
|
21,5 |
0,969 |
1,003 |
1,010 |
1,002 |
0,994 |
0,992 |
0,999 |
1,004 |
1,003 |
0,998 |
|
22,0 |
0,971 |
1,004 |
1,011 |
1,002 |
0,994 |
0,994 |
1,000 |
1,005 |
1,004 |
0,998 |
|
22,5 |
0,973 |
1,005 |
1,011 |
1,002 |
0,995 |
0,995 |
1,002 |
1,006 |
1,004 |
0,998 |
|
23,0 |
0,973 |
1,006 |
1,011 |
1,002 |
0,995 |
0,997 |
1,003 |
1,006 |
1,004 |
0,998 |
|
Продолжение таблицы 3
|
Значения h-функций для æ |
|||||||||||||||||||
0,0 |
0,05 |
0,10 |
0,15 |
0,20 |
0,25 |
0,30 |
0,35 |
0,40 |
0,45 |
|||||||||||
23,5 |
0,975 |
1,006 |
1,011 |
1,002 |
0,995 |
0,998 |
1,004 |
1,006 |
1,003 |
0,998 |
||||||||||
24,0 |
0,975 |
1,006 |
1,010 |
1,001 |
0,995 |
0,998 |
1,005 |
1,006 |
1,002 |
0,998 |
||||||||||
24,5 |
0,975 |
1,006 |
1,009 |
1,000 |
0,995 |
0,999 |
1,005 |
1,005 |
1,000 |
0,997 |
||||||||||
25,0 |
0,975 |
1,006 |
1,008 |
0,999 |
0,995 |
0,999 |
1,004 |
1,004 |
0,999 |
0,996 |
||||||||||
25,5 |
0,975 |
1,006 |
1,007 |
0,998 |
0,994 |
0,999 |
1,004 |
1,002 |
0,997 |
0,996 |
||||||||||
26,0 |
0,975 |
1,006 |
1,006 |
0,997 |
0,994 |
0,999 |
1,003 |
1,001 |
0,996 |
0,996 |
||||||||||
|
Значения h-функций для æ |
|||||||||||||||||||
0,50 |
0,55 |
0,60 |
0,65 |
0,70 |
0,75 |
0,80 |
0,85 |
0,90 |
0,95 |
1,00 |
||||||||||
0,0 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
|||||||||
0,5 |
0,240 |
0,248 |
0,255 |
0,259 |
0,267 |
0,275 |
0,282 |
0,290 |
0,297 |
0,304 |
0,314 |
|||||||||
1,0 |
0,461 |
0,476 |
0,490 |
0,505 |
0,519 |
0,534 |
0,547 |
0,561 |
0,575 |
0,590 |
0,602 |
|||||||||
1,5 |
0,665 |
0,685 |
0,706 |
0,722 |
0,740 |
0,758 |
0,776 |
0,794 |
0,813 |
0,832 |
0,844 |
|||||||||
2,0 |
0,831 |
0,856 |
0,878 |
0,899 |
0,919 |
0,938 |
0,957 |
0,974 |
0,991 |
1,008 |
1,022 |
|||||||||
2,5 |
0,967 |
0,985 |
1,010 |
1,030 |
1,050 |
1,067 |
1,084 |
1,090 |
1,105 |
1,120 |
1,133 |
|||||||||
3,0 |
1,061 |
1,081 |
1,100 |
1,116 |
1,131 |
1,143 |
1,154 |
1,162 |
1,169 |
1,175 |
1,177 |
|||||||||
3,5 |
1,115 |
1,132 |
1,145 |
1,158 |
1,165 |
1,170 |
1,174 |
1,174 |
1,175 |
1,176 |
1,175 |
|||||||||
4,0 |
1,141 |
1,151 |
1,158 |
1,162 |
1,163 |
1,161 |
1,156 |
1,150 |
1,141 |
1,132 |
1,119 |
|||||||||
4,5 |
1,138 |
1,141 |
1,141 |
1,138 |
1,132 |
1,127 |
1,111 |
1,099 |
1,085 |
1,071 |
1,053 |
|||||||||
5,0 |
1,117 |
1,114 |
1,107 |
1,097 |
1,084 |
1,069 |
1,053 |
1,036 |
1,019 |
1,003 |
0,987 |
|||||||||
5,5 |
1,090 |
1,076 |
1,064 |
1,050 |
1,032 |
1,016 |
0,994 |
0,979 |
0,962 |
0,951 |
0,932 |
|||||||||
6,0 |
1,051 |
1,036 |
1,020 |
1,001 |
0,984 |
0,956 |
0,949 |
0,934 |
0,922 |
0,914 |
0,907 |
|||||||||
6,5 |
1,018 |
1,001 |
0,982 |
0,965 |
0,948 |
0,936 |
0,920 |
0,910 |
0,906 |
0,904 |
0,905 |
|||||||||
Продолжение таблицы 3
|
Значения h-функций для æ |
||||||||||
0,50 |
0,55 |
0,60 |
0,65 |
0,70 |
0,75 |
0,80 |
0,85 |
0,90 |
0,95 |
1,00 |
|
7,0 |
0,992 |
0,975 |
0,957 |
0,941 |
0,927 |
0,917 |
0,911 |
0,909 |
0,911 |
0,917 |
0,926 |
7,5 |
0,974 |
0,956 |
0,944 |
0,931 |
0,922 |
0,919 |
0,920 |
0,927 |
0,934 |
0,946 |
0,962 |
8,0 |
0,966 |
0,952 |
0,941 |
0,934 |
0,932 |
0,936 |
0,944 |
0,955 |
0,970 |
0,986 |
1,002 |
8,5 |
0,964 |
0,954 |
0,948 |
0,948 |
0,951 |
0,958 |
0,974 |
0,990 |
1,006 |
1,023 |
1,041 |
9,0 |
0,968 |
0,962 |
0,961 |
0,967 |
0,976 |
0,990 |
1,006 |
1,023 |
1,038 |
1,051 |
1,060 |
9,5 |
0,975 |
0,972 |
0,977 |
0,987 |
1,000 |
1,015 |
1,033 |
1,048 |
1,059 |
1,065 |
1,066 |
10,0 |
0,982 |
0,984 |
0,993 |
1,006 |
1,020 |
1,036 |
1,049 |
1,059 |
1,063 |
1,062 |
1,056 |
10,5 |
0,988 |
0,994 |
1,005 |
1,019 |
1,033 |
1,046 |
1,054 |
1,058 |
1,055 |
1,048 |
1,033 |
11,0 |
0,993 |
1,001 |
1,014 |
1,027 |
1,039 |
1,047 |
1,048 |
1,044 |
1,034 |
1,021 |
1,005 |
11,5 |
0,996 |
1,006 |
1,017 |
1,029 |
1,037 |
1,039 |
1,034 |
1,024 |
1,010 |
0,994 |
0,977 |
12,0 |
0,977 |
1,007 |
1,018 |
1,026 |
1,029 |
1,025 |
1,015 |
1,000 |
0,984 |
0,970 |
0,958 |
12,5 |
0,997 |
1,007 |
1,015 |
1,019 |
1,017 |
1,010 |
0,995 |
0,980 |
0,965 |
0,955 |
0,950 |
13,0 |
0,997 |
1,006 |
1,012 |
1,012 |
1,005 |
0,993 |
0,980 |
0,965 |
0,955 |
0,952 |
0,955 |
13,5 |
0,998 |
1,005 |
1,008 |
1,004 |
0,995 |
0,982 |
0,968 |
0,958 |
0,954 |
0,958 |
0,970 |
14,0 |
0,999 |
1,005 |
1,005 |
0,998 |
0,987 |
0,975 |
0,965 |
0,961 |
0,965 |
0,976 |
0,991 |
14,5 |
1,002 |
1,005 |
1,003 |
0,994 |
0,983 |
0,970 |
0,969 |
0,971 |
0,981 |
0,997 |
1,010 |
15,0 |
1,005 |
1,006 |
1,002 |
0,994 |
0,983 |
0,977 |
0,978 |
0,987 |
1,001 |
1,018 |
1,032 |
15,5 |
1,008 |
1,007 |
1,001 |
0,992 |
0,985 |
0,984 |
0,991 |
1,003 |
1,019 |
1,032 |
1,048 |
16,0 |
1,010 |
1,008 |
1,001 |
0,994 |
0,990 |
0,993 |
1,003 |
1,018 |
1,031 |
1,040 |
1,039 |
16,5 |
1,011 |
1,008 |
1,001 |
0,995 |
0,995 |
1,001 |
1,014 |
1,027 |
1,035 |
1,037 |
1,028 |
17,0 |
1,012 |
1,007 |
1,000 |
0,996 |
0,999 |
1,008 |
1,020 |
1,030 |
1,032 |
1,026 |
1,012 |
17,5 |
1,009 |
1,005 |
0,998 |
0,997 |
1,002 |
1,012 |
1,023 |
1,027 |
1,023 |
1,013 |
0,994 |
18,0 |
1,008 |
1,001 |
0,997 |
0,997 |
1,004 |
1,014 |
1,020 |
1,018 |
1,008 |
0,993 |
0,978 |
18,5 |
1,005 |
0,999 |
0,995 |
0,997 |
1,005 |
1,012 |
1,014 |
1,007 |
0,993 |
0,978 |
0,969 |
19,0 |
1,001 |
0,995 |
0,993 |
0,997 |
1,004 |
1,009 |
1,006 |
0,995 |
0,981 |
0,970 |
0,967 |
Окончание таблицы 3
|
Значения h-функций для æ |
||||||||||
0,50 |
0,55 |
0,60 |
0,65 |
0,70 |
0,75 |
0,80 |
0,85 |
0,90 |
0,95 |
1,00 |
|
19,5 |
0,998 |
0,992 |
0,992 |
0,997 |
1,003 |
1,005 |
0,998 |
0,985 |
0,973 |
0,967 |
0,973 |
20,0 |
0,995 |
0,991 |
0,992 |
0,998 |
1,003 |
1,001 |
0,991 |
0,980 |
0,972 |
0,975 |
0,986 |
20,5 |
0,994 |
0,991 |
0,994 |
0,999 |
1,002 |
0,998 |
0,987 |
0,978 |
0,977 |
0,990 |
1,001 |
21,0 |
0,993 |
0,992 |
0,996 |
1,001 |
1,002 |
0,996 |
0,987 |
0,982 |
0,989 |
1,001 |
1,015 |
21,5 |
0,994 |
0,995 |
0,999 |
0,995 |
1,002 |
0,995 |
0,988 |
0,988 |
0,988 |
1,013 |
1,025 |
22,0 |
0,995 |
0,997 |
1,000 |
1,004 |
1,002 |
0,995 |
0,991 |
0,997 |
1,010 |
1,024 |
1,029 |
22,5 |
0,996 |
1,000 |
1,005 |
1,005 |
1,002 |
0,996 |
0,996 |
1,006 |
1,018 |
1,028 |
1,028 |
23,0 |
0,997 |
1,002 |
1,007 |
1,007 |
1,002 |
0,997 |
1,001 |
1,011 |
1,022 |
1,025 |
1,016 |
23,5 |
0,998 |
1,003 |
1,008 |
1,006 |
1,001 |
0,998 |
1,004 |
1,015 |
1,021 |
1,016 |
1,002 |
24,0 |
0,999 |
1,004 |
1,007 |
1,004 |
0,999 |
0,999 |
1,007 |
1,015 |
1,016 |
1,006 |
0,990 |
24,5 |
1,000 |
1,004 |
1,006 |
1,002 |
0,998 |
0,999 |
1,007 |
1,012 |
1,007 |
0,995 |
0,979 |
25,0 |
1,000 |
1,004 |
1,004 |
0,999 |
0,996 |
1,000 |
1,007 |
1,008 |
0,998 |
0,984 |
0,975 |
25,5 |
1,000 |
1,003 |
1,002 |
0,997 |
0,995 |
1,000 |
1,005 |
1,001 |
0,989 |
0,978 |
0,977 |
26,0 |
1,000 |
1,002 |
0,999 |
0,995 |
0,995 |
1,000 |
1,002 |
0,997 |
0,984 |
0,978 |
0,983 |
Переходный процесс лучше строить на миллиметровке. Он определяется суммированием ординат составляющих h1(t), h2(t), h3(t). Переходная функция n*(t) – скорости вращения вала двигателя в относительных единицах и ее составляющие показаны на рисунке 14.
Привести переходную функцию n*(t) в именованные единицы (обороты в минуту) можно, умножив ее ординаты на заданные обороты n(t)=n*(t)n0. По полученной переходной характеристике можно сделать вывод о динамических качествах системы автоматического регулирования, определив время регулирования tрег и динамическую ошибку Δnд.
Время регулирования – это время от начала переходного процесса до установившегося режима с определенной погрешностью, например, когда скорость вращения двигателя достигает установившегося значения с точностью 10 %. Динамическую ошибку будем определять как разность между наибольшим значением n(t) и ее установившейся величиной (рисунок 15).
Для проверки правильности построения частотных характеристик и переходного процесса, а также для более глубокого анализа САР служит программа tau.exe. При запуске данной программы на экране появляется форма, в которой выводится один из графиков, выбираемый с помощью манипулятора «мышь» и соответствующего переключателя (рисунок 16):
вещественная частотная характеристика;
АФЧХ;
ЛАЧХ;
переходный процесс.
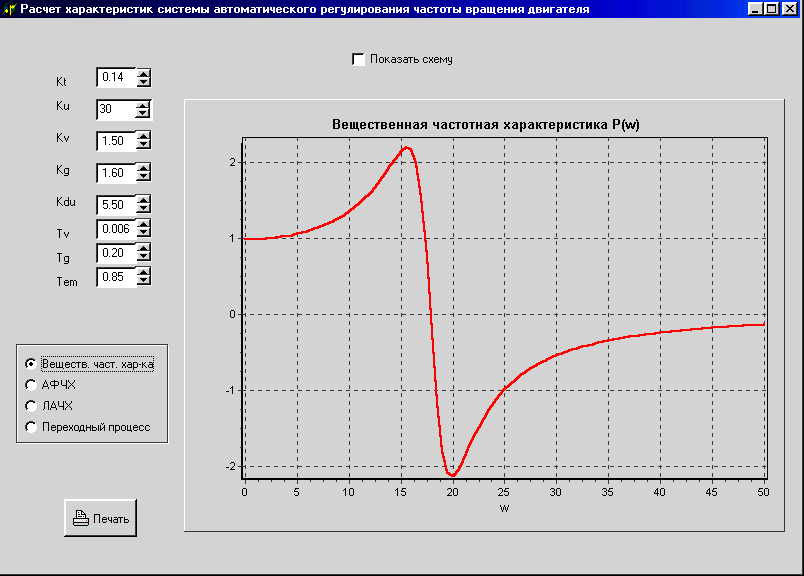
Рисунок 16
С помощью манипулятора «мышь» можно изменять значения коэффициентов усиления и постоянных времени звеньев системы регулирования. При этом автоматически пересчитываются характеристики системы регулирования, анализируя которые можно уменьшать динамическую погрешность системы, улучшая ее устойчивость и повышая качество регулирования.
Чтобы увеличить на экране какую-либо зону графика, например зону АФЧХ вблизи точки (-1, j0), следует выделить эту зону, начиная с левого верхнего угла, удерживая в нажатом состоянии левую кнопку манипулятора «мышь». Для возврата к исходному масштабу необходимо выделить любую зону графика, начиная с правого нижнего угла.