

Содержание:
|
Задание
Введение
|
2
3 |
стр.
стр. |
|
I. Анализ системы
|
4 |
стр. |
|
1.1 Определение ПФ разомкнутой системы и замкнутой в режимах управления, стабилизации и по ошибке
|
4 |
стр. |
|
1.2 Составление модели исследуемой системы управления
|
5 |
стр. |
|
1.3 Определение показателей качества нескорректированной системы
|
6 |
стр. |
|
1.4 ЛАХ, ЛФХ и АФХ для САУ, составленной из функционально необходимых звеньев оценка запасов устойчивости замкнутой САУ |
7 |
стр. |
|
1.5 Вывод
|
9 |
стр. |
|
II. Синтез корректирующих устройств (КУ)
|
10 |
стр. |
|
2.1 Синтез корректирующих устройств: последовательного и в обратной связи
|
10 |
стр. |
|
2.2 Проверка устойчивости скорректированной системы
|
12 |
стр. |
|
2.3 Переходная характеристика и определение показателей качества скорректированной системы
|
14 |
стр. |
|
2.4 Вывод
|
15 |
стр. |
|
III. Теоретические сведения о исследовании нелинейных элементов САУ
|
16 |
стр. |
|
Список литературы |
22 |
стр. |
Задание
Вариант №24
Исходная структурная схема представлена на рис 1.1.
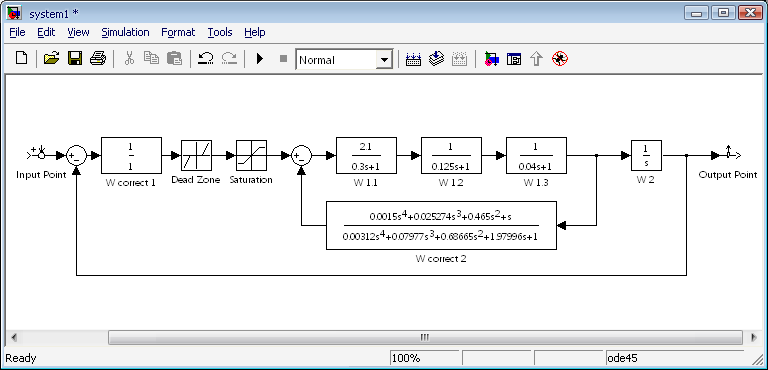
Рис. 1.1 - Исходная структурная схема
-
Требования к синтезируемой системе
σзад,%
Tзаду, c
c0зад
c1зад
c2зад
30
1,5
0
1/80
1/8
Введение
Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения. В теории автоматического регулирования основными являются проблемы: устойчивости, качества переходных процессов, статической и динамической точности, автоколебаний, оптимизации, синтеза и отождествления (идентификации). Задачи общей теории автоматического регулирования заключаются в решении перечисленных проблем. При поиске решений используются:
Методы анализа устойчивости замкнутых САР.
Методы оценки качественных показателей САР.
Методы повышения точности САР.
Методы коррекции динамических свойств САР.
Методы синтеза САР.
Задача коррекции состоит в повышении динамической точности САР в переходных режимах. Она возникает, поскольку стремление снизить ошибки регулирования в типовых режимах, приводит к необходимости использования таких значений общего коэффициента усиления, при которых без принятия специальных мер (внедрения пассивных звеньев) система оказывается неустойчивой.
Синтез системы имеет конечной целью отыскание: 1) рациональной структуры системы и 2) установление оптимальных величин параметров отдельных звеньев. Задача повышения точности САР обычно предполагает существенный пересмотр ее структуры. Возможны замены или добавления отдельных звеньев в контуре.
I. Анализ системы
Определение пф разомкнутой системы и замкнутой в режимах управления, стабилизации и по ошибке
На рисунке 1.1 показана схема разомкнутой системы, составленной из функционально необходимых звеньев (без корректирующих устройств).
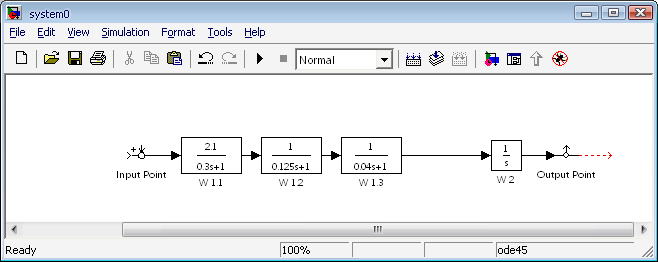
Рис. 1.2 Схема разомкнутой системы
Передаточной функцией (ПФ) системы автоматического регулирования или какого-либо другого устройства называется отношение преобразования Лапласа выходной величины к преобразованию Лапласа входного сигнала при нулевых начальных условиях.
Передаточная функция разомкнутой системы (f(t)=0):
![]()
Передаточная функция разомкнутой системы по возмущению (y(t)=0):
![]()
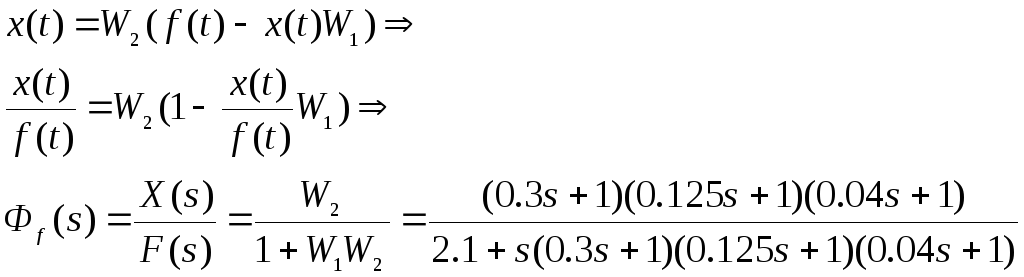
Передаточная функция замкнутой системы без корректирующих устройств:
![]()
Передаточная функция замкнутой системы по возмущению (y(t)=0):
![]()
Так как у(t)=0
Передаточная функция замкнутой системы относительно ошибки по задающему воздействию (f(t)=0):
![]()
Так как f(t)=0

Передаточная функция замкнутой системы относительно ошибки по возмущающему воздействию (y(t)=0):

1.2 Составление модели исследуемой системы управления Matlab (Simulink)

1.2 Определение показателей качества нескорректированной системы
В программном продукте Simulink построим переходную характеристику нескорректированной системы (рис 1.3).
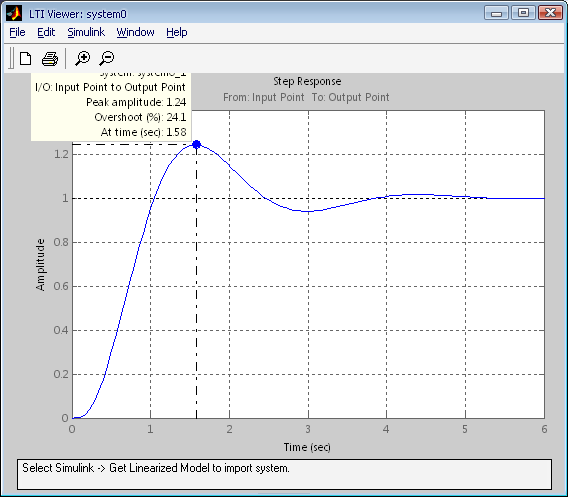
Рис. 1.3 Переходная характеристика
По переходной характеристике определим основные показатели качества:
Время регулирования: Ту=6 с
Величина перерегулирования:
![]() ,
где
,
где
ymax – максимальное значение амплитуды
y(∞) – величина установившегося значения
1.4 Лах, лфх и афх для сау, составленной из функционально необходимых звеньев оценка запасов устойчивости замкнутой сау
Проверка устойчивости разомкнутой системы по алгебраическому критерию Гурвица.
Передаточная функция разомкнутой системы:
![]()
Характеристическое уравнение разомкнутой системы:
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Все коэффициенты положительны, необходимое условие устойчивости выполняется. Найдем главные миноры матрицы Гурвица:
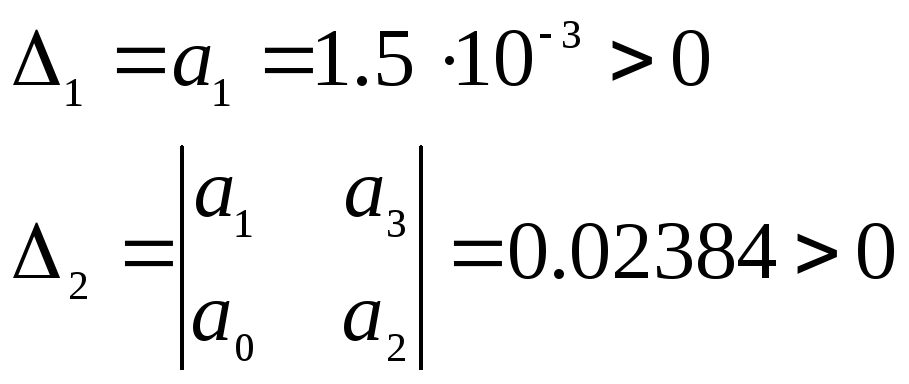 ,
,
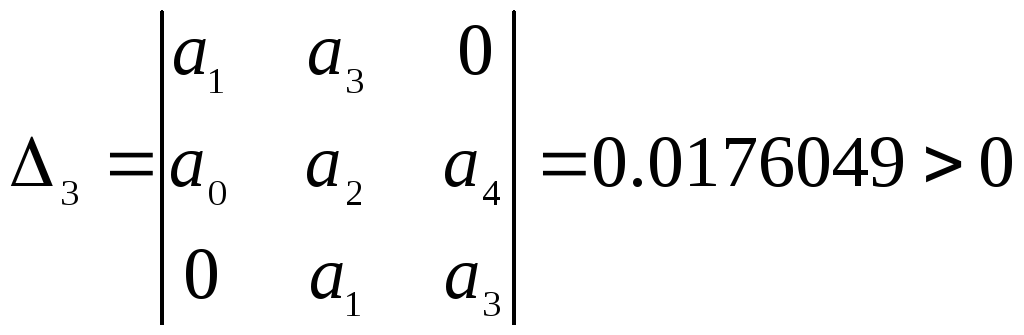 ,
,![]()
Все главные миноры матрицы Гурвица положительны, следовательно, рассматриваемая система является устойчивой по критерию Гурвица.
Используя программное обеспечение Matlab (Simulink), построим ЛАХ и ЛФХ рисунок 1.4:
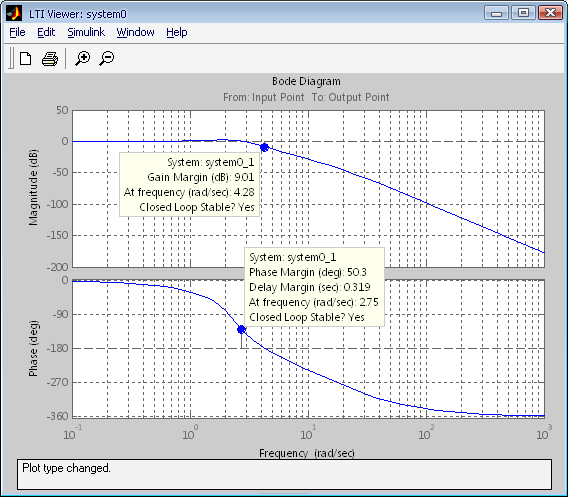
Рис. 1.4 – ЛАХ и ЛФХ САУ, составленной из функционально
необходимых звеньев
Устойчивая в
разомкнутом
состоянии система будет устойчивой и
в замкнутом
состоянии,
если
сдвиг по фазе на частоте среза не
достигает -![]()
(-180°).
Система устойчива.
Запас устойчивости по фазе 50.3º, по амплитуде 9.01 Дб.
Качественно построим амплитудно-фазовую характеристику (АФХ)
рисунок 1.5:
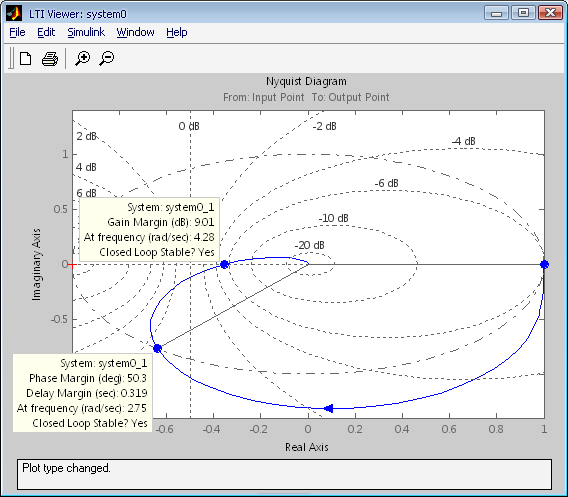
Рис 1.5 – АФХ САУ, без корректирующих устройств
Для проверки устойчивости используем частотный критерий устойчивости Найквиста:
Для устойчивости замкнутой САУ необходимо и достаточно,
чтобы годограф АФХ разомкнутой системы не охватывал точку с координатами (-1, j 0).
В нашем случае годограф не охватывает точку с данными координатами, соответственно, делаем вывод, что система устойчива.