

Лабораторная работа №3. Вариант №4
.docМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
УФИМСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФИЛИАЛ В Г. ИШИМБАЙ
Отчет по лабораторной работе №3
по предмету «Теория автоматического управления»
на тему: Исследование динамической точности систем
автоматического регулирования.
Выполнил: студент гр. АТП-308
Шарипов Д.
Приняла: Перевертайло Ю.В.
Ишимбай 2006
1. Цель работы
Целью данной работы является определение динамической точности систем автоматического регулирования путём нахождения коэффициентов ошибок, а также с помощью логарифмических амплитудно-частотных характеристик; приобретение навыков моделирования систем автоматического регулирования на ЭВМ с помощью пакета прикладных программ.
2. Выполнение работы
По заданной передаточной функции W(p) разомкнутой системы определите порядок астатизма системы.
Задание №4
Передаточная функция разомкнутой системы имеет вид:
![]()
Определить коэффициент передачи масштабирующего устройства во входной цепи, при котором система приобретает астатизм первого порядка относительно задающего воздействия (рис 3.4, б).
Дано: K = 10 … 100, T0 = 0.001 сек., T1 = 0.01 сек., T2 = 0.1 сек. (4, с.167)

Пусть k=5*10=50. Тогда передаточная функция примет вид:
![]()

Так как ν=0, то система является статической.
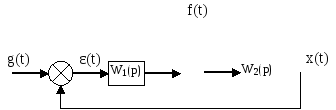
Составьте структурную схему системы по типу рис. (3.1, а или б). Наберите модель системы на экране с помощью пакета прикладных программ, но без обратной связи.
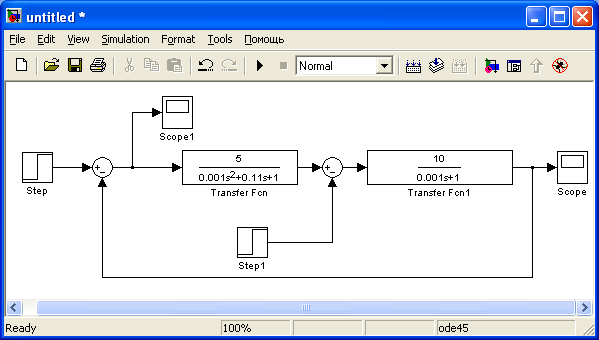
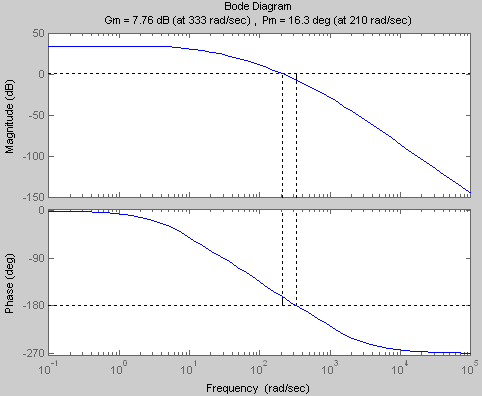
Получите логарифмическую амплитудную и фазовую частотные характеристики и определите по ним устойчивость системы (запасы устойчивости по фазе и амплитуде).
|
ωср Δφ ωкр ΔА |
ωср=210 c-1 ωкр=333 ωср<ωкр, значит, система является устойчивой. Запас устойчивости по амплитуде:
Запас устойчивости по фазе:
|
Если система неустойчива, введите корректирующие элементы, проверьте запасы устойчивости. Если они достаточны, определите по ЛАХ добротности системы по скорости и ускорению (см. 2.3).
ων ωε -20
дБ/дек -40
дБ/дек -60
дБ/дек 0
дБ/дек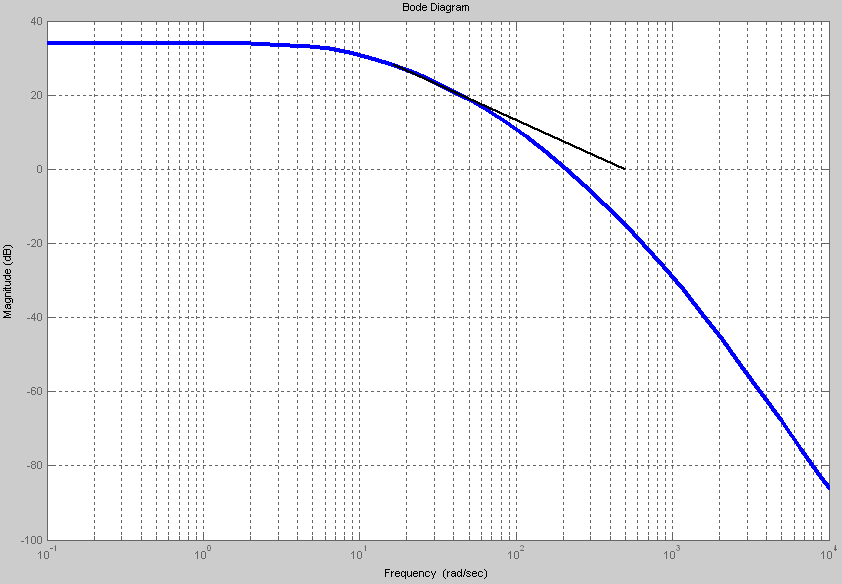
Из графика ЛАХ находим, что: ων=102,7≈501(с-1) ωε=102,32≈210 (с-1)
Тогда:
![]()
![]()
Для скорректированной системы рассчитайте коэффициенты ошибок (см. 2.2) и сравните их с теми, которые определили по ЛАХ.
Определим коэффициенты ошибки при управляющем воздействии:
![]()
![]()
![]()

Как
видно, значения
![]() и
и
![]() ,
полученные из графика ЛАХ, приближенно
равны расчетным значениям. Значит
коэффициенты добротностей по скорости
и ускорению определены верно.
,
полученные из графика ЛАХ, приближенно
равны расчетным значениям. Значит
коэффициенты добротностей по скорости
и ускорению определены верно.
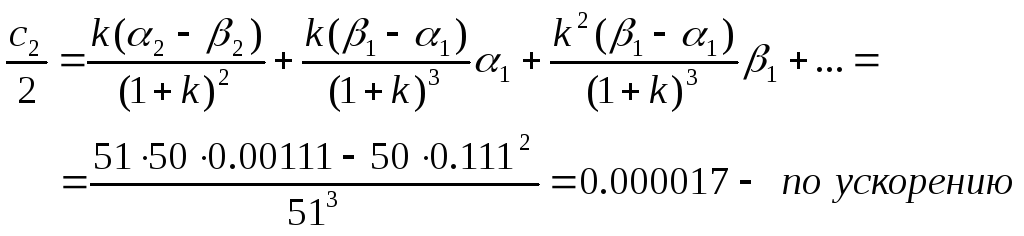
Определим коэффициенты ошибки при возмущающем воздействии:
В исходной структурной схеме перенесем сумматор через звено по направлению распространения сигнала. Получим:
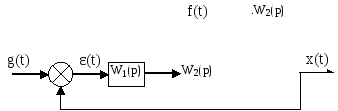
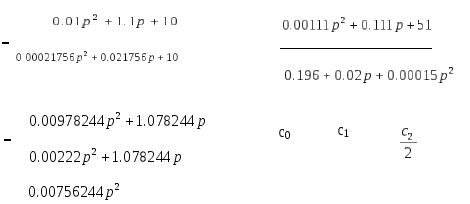
Определим передаточную функцию данной системы:

Как видно, полученная передаточная функция не содержит в числителе сомножитель pυ. Величина υ определяет порядок астатизма системы. Таким образом, рассматриваемая система является статической.
Таким
образом:
![]()
Напишите выражение e(t) для случаев:
![]()
![]()
![]()
![]()
Зависимость ошибки от времени для астатической системы первого порядка по управляющему воздействию имеет вид:
![]()
1.
Пусть g(t)=1(t).
Тогда
![]()
2.
Пусть g(t)=t.
Тогда
![]()
3.
Пусть g(t)=t2.
Тогда
![]()
4.
Пусть g(t)=sin
0.5t. Тогда
![]()
Замкните
систему единичной отрицательной обратной
связью. Подайте на вход
![]() и получите зависимость
и получите зависимость
![]() .
Повторите эксперимент при
.
Повторите эксперимент при
![]() ,
,![]() и
и
![]() .
Зарисуйте кривые ошибки
.
Зарисуйте кривые ошибки
![]() .
Сравните с расчётными данными. Сделайте
выводы.
.
Сравните с расчётными данными. Сделайте
выводы.
|
ε(t) ε(t) ε(t) ε(t) ε(t) ε(t) |
g(t)=1(t)
Как видно из графика ошибка при единичном ступенчатом воздействии равна 0.02, что приближенно равно расчетным данным.
g(t)=t
Как видно из графика ошибка при линейно-нарастающем воздействии линейно увеличивается со временем. В частности: при t=5 ошибка ε(t) ≈ 0.1 при t=10 ошибка ε(t) ≈ 0.2 что полностью совпадает с расчетными данными.
g(t)=t2
Как видно из графика ошибка при квадратичном воздействии увеличивается со временем. В частности: при t=5 ошибка ε(t) ≈ 0.5 при t=10 ошибка ε(t) ≈ 2 что полностью совпадает с расчетными данными.
g(t)=sin 0.5t
Как видно из графика ошибка при воздействии синусоидального характера также носит синусоидальный характер. В частности: при t=3 ошибка ε(t) ≈ 0.0195 при t=9 ошибка ε(t) ≈ - 0.0195 что полностью совпадает с расчетными данными. |



Напишите выражение ef (t) для случаев:
![]()
Зависимость ошибки от времени для астатической системы первого порядка по возмущающему воздействию имеет вид:
![]()
1.
Пусть f (t)=1(t).
Тогда
![]()
2.
Пусть f (t)=t.
Тогда
![]()
3.
Пусть f (t)=t2.
Тогда
![]()
4.
Пусть f (t)=sin
0.5t. Тогда
![]()
Исследуйте
поведение системы при действии на неё
возмущающего воздействия в виде
единичного скачка
![]() .
Зарисуйте
.
Зарисуйте
![]() .
Повторите опыт при
.
Повторите опыт при
![]() .
Сделайте выводы.
.
Сделайте выводы.
|
ε f (t) ε f (t) ε f (t)
ε f (t) ε f (t) |
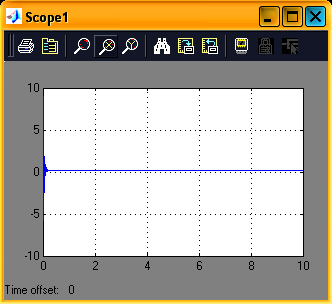
f(t)=1(t)
Как видно из графика ошибка при единичном ступенчатом воздействии равна 0.2, что приближенно равно расчетным данным.
f(t)=t
Как видно из графика ошибка при линейно-нарастающем воздействии линейно увеличивается со временем. В частности: при t=5 ошибка ε(t) ≈ 1 при t=10 ошибка ε(t) ≈ 2 что полностью совпадает с расчетными данными.
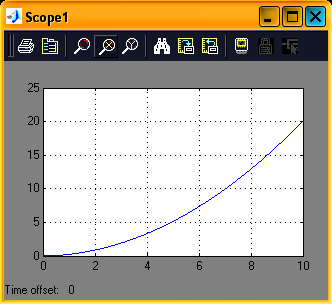
f(t)=t2
Как видно из графика ошибка при квадратичном воздействии увеличивается со временем. В частности: при t=5 ошибка ε(t) ≈ 5 при t=10 ошибка ε(t) ≈ 20 что полностью совпадает с расчетными данными.
f(t)=sin 0.5t
Как видно из графика ошибка при воздействии синусоидального характера также носит синусоидальный характер. В частности: при t=3 ошибка ε(t) ≈ 0.195 при t=9 ошибка ε(t) ≈ - 0.195 что полностью совпадает с расчетными данными. |


3. Вывод
В данной работе определили динамическую точность системы автоматического регулирования путём нахождения коэффициентов ошибок, а также с помощью логарифмических амплитудно-частотных характеристик. Теоретические и эмпирические результаты полностью совпали. Также определили запасы устойчивости по фазе и амплитуде.