

Занятие №5
Лабораторная работа №1
Тема: «Приобретение навыков работы з системами работающими по разомкнутому и замкнутому контуру.»
Цель работы:
Практическое изучение устройств и принципов работы систем работающими по разомкнутому и замкнутому контуру.
Программа работы:
Изучить конструкцию, принцип действия и назначение частей систем работающими по разомкнутому и замкнутому контуру.
Собрать схемы работающие по замкнутому и разомкнутому контуру, и произвести регулировку их работы.
Произвести наблюдение за работой схем, выяснить их достоинства и недостатки.
Основные сведения об устройствах и работе систем
работающих по разомкнутому и замкнутому контуру.
В реальных условиях эксплуатации судовых систем очень часто необходимо в течение продолжительного времени изменять или поддерживать постоянными значения каких-либо физических величин (частоту вращения, напряжение, температуру, давление и т. д.), харак-теризующих работу машины, технологический процесс. Для этого используют достаточно сложные устройства, называемые автоматическими регуляторами, которые должны на основании измерения регулируемых параметров формировать воздействия на объект регулирования.
Процесс регулирования может осуществляться по разомкнутому или замкнутому циклу (контуру).
На рис. 5.1 показаны схемы систем регулирования частоты вращения электродвигателя постоянного тока. В системе разомкнутого цикла (рис. 5.1, а) перемещение (вручную или каким-либо механизмом) движка 2 потенциометра 1 изменяет напряжение на входе усилителя 3. Изменение напряжения приводит к изменению тока в обмотке якоря электродвигателя 4, что и вызывает изменение его частоты вращения, которая измеряется тахометром 5, соединенным с вольтметром 6. Такие системы не обеспечивают высокой точности.
Схема рис. 5.1, б отличается от предыдущей тем, что напряжение тахогенератора 5 сравнивается на входе усилителя 3 с напряжением, которое поступает с потенциометра 1. Если частота вращения электро двигателя отличается от заданной, то возникает сигнал ошибки
![]() ,
который после усилителя 3 поступает
на обмотку якоря электродвигателя. При
этом сигнал ошибки
,
который после усилителя 3 поступает
на обмотку якоря электродвигателя. При
этом сигнал ошибки
![]() уменьшается
до допустимого значения, а частота
вращения возвращается к заданному
значению. Этот принцип основан на
использовании обратной связи и
обеспечивает достаточную точность в
случае изменения регулируемых параметров.
уменьшается
до допустимого значения, а частота
вращения возвращается к заданному
значению. Этот принцип основан на
использовании обратной связи и
обеспечивает достаточную точность в
случае изменения регулируемых параметров.
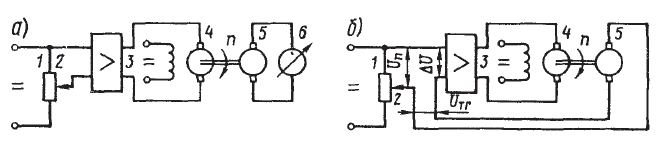
Рис. 2.1. Схема систем регулирования частоты вращения электродвигателя:
а — работающей по разомкнутому циклу; б — работающей по замкнутому циклу
И так, системой автоматического регулирования называется динамическая система, стремящаяся сохранять в допустимых пределах отклонения между требуемыми и действительными изменениями регулируемых переменных при помощи их сравнения на основе принципа обратной связи (замкнутого цикла) и использования получающихся при этом сигналов управления источниками энергии. В основе построения САР лежат два принципа управления: по отклонению управляемой величины; по возмущению. Возможно одно временное их применение — комбинированный принцип. При создании САР используют различные законы управления.
Закон управления — это математическая зависимость, в соответствии с которой управляющее воздействие на объект регулирования вырабатывается управляющим устройством в функции от первичных сигналов. В судовых САР обычно используют частные законы управления:
пропорциональный, пропорциональный с воздействием по производной, интегральный, пропорционально-интегральный, пропорционально-интегрально-дифференциальный по возмущению, по возмущению и его производной.
Порядок выполнения лабораторной работы.
При изучении систем работающих по разомкнутому и замкнутому контуру необходимо изучить основное построение подключения схем.
Изучить момент когда на системы подаётся нагрузка, как реагируют системы при этом.
Определить основные достоинства и недостатки схем в момнт отклонения выходной величины от заданого значения.
Отчёт по лабораторной работе
В отчёте по лабораторной работе должно быть:
1. Основная теория по лабораторной работе.
2. Схемы систем работающими по разомкнутому и замкнутому контуру.
3. Составлен краткий отчёт об особенностях а также достоинствах и недостатках работы
систем.
Контрольные вопросы:
Что значит система работает по замкнутому цыклу?
Что значит система работает по разомкнутому цыклу?
Каковы достоинства системы работающей по замкнутому цыклу?
Каковы недостатки системы работающей по разомкнутому цыклу?
Литература:
1. Акулов Ю.И. «Судовая электроника и электроавтоматика» Транспорт, 1982 г. Стр. 120-127
Занятие №6
Лабораторная работа №2
Тема: «Приобретение навыков работы з системами стабилизации,
програмного регулирования, следящими и адаптивными системами.»
Цель работы:
Практическое изучение устройств и принципов работы систем стабилизации, програмного регулирования, следящих и адаптивных системам.
Программа работы:
Изучить конструкцию, принцип действия и назначение систем стабилизации, програмного регулирования, следящих и адаптивных системам.
Изучить работающий пример схемы каждой из систем регулирования.
Приобрести навыки понимания работы и умение различать в будующем каждый под тип системы.
Основные сведения системах стабилизации,
програмного регулирования, следящими и адаптивными системами.
В зависимости от поставленной задачи, характера информации, характеристик объекта
все САР делятся на следующие четыре класса:
с и с т е м ы с т а б и л и з а ц и и , в которых алгоритм функционирования содержит задачу поддержания значения управляемой величины постоянным (с допустимой ошибкой ее независимо от действующих на систему возмущений). Примером такой системы могут служить регулирование частоты и напряжения генераторов, частоты вращения двигателей, успокоители качки и др.;
с и с т е м ы п р о г р а м м н о г о р е г у л и р о в а н и я , в которых алгоритм функционирования содержит указание изменять значение управляемой величины в соответствии с заданной последовательностью изменений во времени или в функции другой величины. Основной задачей системы является выполнение заданной программы. Различают системы с временной (заданной по времени) и с параметрической (заданной в текущих координатах) программами. Примером временной программы может служить система автоматического пуска котельной установки ォМонархサ. Параметрические программы используют в системах управления копировальных станков. Особенностью системы про граммного управления является наличие в ней программного устройства;
с л е д я щ и е с и с т е м ы , алгоритм функционирования в которых содержится указание изменять значение управляемой величины в зависимости от неизвестного заранее значения переменной величины на входе системы. Основной задачей системы является слежение за некоторой величиной, которая может изменяться в зависимости от внешнего воздействия на объект. Примером следящей системы может служить авторулевой, система управления частотой вращения вала судового главного двигателя;
а д а п т и в н ы е (самонастраивающиеся) с и с т е м ы , в которых параметры и структура управляющего устройства в процессе эксплуатации автоматически изменяются на основании текущей информации об изменении параметров объекта или характеристик внешних возму щений. В эти системы могут входить все предыдущие. Примером такой системы может служить система автоматической проводки судна по форватеру в зависимости от глубины.
Примеры разбираемых систем: Система стабилизации напряжения синхронного генератора с элекронным регулятором.
В схему (рис. 5.1) входят: объект регулирования
— синхронный генератор большой мощности
СГ; измерительный элемент RС-четырехполюсником
ИЭЧ, представляющий собой при номинальном
Uс.г. уравновешенный мост;
корректирующий элемент гибкой обратной
связи ЭГОС; фазочувствительный усилитель
ФЧУ, служащий для преобразования сигнала
разбаланса моста в соответствующий
сдвиг фаз управляющего напряжения
тиристорного усилителя ТУ. Исполнительным
элементом регулятора служит электромашинный
возбудитель ЭМВ. Электронный регулятор
является автоматической системой
статического регулирования напряжения,
т.е. при изменении нагрузки на СГ для
поддержания напряжения на номинальном
уровне необходимо устанавливать
различные токи возбуждения. Принцип
работы системы заключается в следующем.
Для получения необходимой характеристики
компаундирования используют трансформаторы
тока ТрТ2 и напряжения Tpl. Они формируют
напряжение на входе ИЭЧ Отклонение
напряжения от номинального вызывает
изменение напряжения U1
на выходе суммирующего трансформатора
Т, т. е. U1 = ktUc.г.,
где kt
— коэффициент трансформации; Uc.г
— напряжение синхронного генератора.
Напряжение на выходе измерительного
моста Uи.м.,
где kи.м.—
передаточный коэффициент моста, Сигнал
Uи.м
как функция времени поступает на
четырехполюсник ИЭЧ. Напряжение Uи.м
зависит от напряжения Uy (t), поступающего
на вход ФЧУ. Напряжение на входе ФЧУ
Uф.ч.у.
= Uу
– Uо.с, где U о.с — сигнал
элемента гибкой обратной связи. Напряжение
на входе ТУ Uт.у. = kф.ч.у.
Uф.ч.у.
, где kф.ч.у.
— передаточный коэффициент ФЧУ.
Коэффициент передачи ТУ kт.у
= Uв./Uт.у.
, где Uв
— напряжение на входе возбудителя. Ток
от ТУ поступает на обмотку WR возбудителя,
затем на якорь генератора постоянного
тока и обмотку возбуждения СГ
![]() с.г,
в которой меняется ток возбуждения,
поддерживая Uc.г
в заданных пределах.
с.г,
в которой меняется ток возбуждения,
поддерживая Uc.г
в заданных пределах.

Рис. 5.1. Функциональная схема стабилизации напряжения
Система программного регулирования.
Программный регулятор(рис. 5.2) может изменять регулируемую величину по заданному закону без вмешательства оператора. Профиль кулачка 1, который имеет постоянную частоту вращения, соответствует закону изменения регулируемой величины. Толкатель 2 с роликом перемещается в вертикальном направлении в зависимости от профиля кулачка. К толкателю прикреплен движок реостата R, от положения которого зависит напряжение выхода. Временные программные механизмы используют в схемах автоматического пуска аварийных судовых электростанций. Программный механизм имеет на одном валу несколько кулачков, которые замыкают или размыкают контакты определенных электрических цепей согласно заданной программе. Такие устройства осуществляют подготовку дизеля к пуску, его пуск, переключение ответственных потребителей с шин главной электростанции на шины аварийной и др.
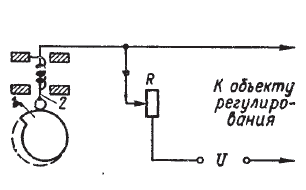
Рис. 5.2. Программный регулятор
Следящие системы.
На современных судах наиболее распространенным типом следящих систем является система воспроизведения угла, широко используемая в приборах управления судном и при ди- станционном управлении различными объектами. Отличительной особенностью следящих систем по сравнению с системами стабилизации является то, что в них объектом управления является элемент (сервомотор), который приводит в движение исполнительный орган объекта, подлежащего управлению. Рассмотрим систему регулирования угла поворота вала (отрабаты-вающей оси), управляемого двигателя (рис. 5.3). Поворотом задающего вала устанавливается задающее воздействие. Задающее устройство 3 соединено с задающей осью, а измерительное
2 - с отрабатывающей. Напряжение
![]() пропорционально углу
пропорционально углу
![]() ,
а напряжение
,
а напряжение
![]() -
углу
-
углу
![]() Разность этих напряжений
Разность этих напряжений
![]() по
пепи 4 подается на усилитель 5, который
питает обмотку якоря двигателя 1, 6. При
любом несоответствии положения задающей
и отрабатывающей осей в цепи усилителя
появляется разность напряжений е. Вал
двигателя будет вращаться до тех пор,
пока угол отрабатывающей оси не станет
равным углу поворота задающей оси и е
не будет равно нулю и тока в якоре не
будет.
по
пепи 4 подается на усилитель 5, который
питает обмотку якоря двигателя 1, 6. При
любом несоответствии положения задающей
и отрабатывающей осей в цепи усилителя
появляется разность напряжений е. Вал
двигателя будет вращаться до тех пор,
пока угол отрабатывающей оси не станет
равным углу поворота задающей оси и е
не будет равно нулю и тока в якоре не
будет.
Для повышения устойчивости работы
системы применяется корректирующее
устройство 7, состоящее из тахометрического
генератора для измерения частоты
вращения со вала двигателя и регулировочного
(корректирующего) резистора RK. Напряжение
коррекции ык, пропор - циональное частоте
вращения со, подается в цепь сравнения
и складывается с напряжением е. В
статическом режиме при
![]() и
и
![]() .
В динамическом режиме, когда
.
В динамическом режиме, когда
![]() ,
корректирующая цепь замедляет разгон
двигателя, однако при этом она несколько
заглушает автоколебания в системе. Если
на задающую ось установить штурвал, а
к валу двигателя присоединить баллер
руля, получится система управления
судном. При повороте рулевого штурвала
на угол
система повернет баллер руля на такой
же угол
,
корректирующая цепь замедляет разгон
двигателя, однако при этом она несколько
заглушает автоколебания в системе. Если
на задающую ось установить штурвал, а
к валу двигателя присоединить баллер
руля, получится система управления
судном. При повороте рулевого штурвала
на угол
система повернет баллер руля на такой
же угол
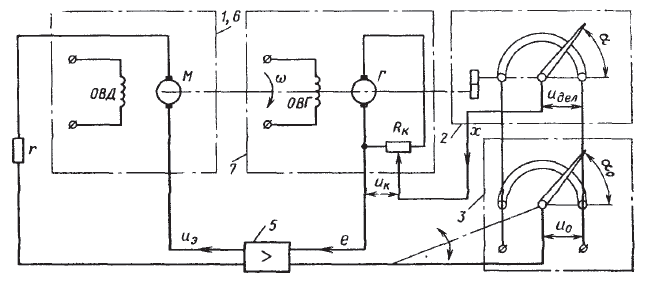
Рис. 5.3. Система регулирования угла поворота вала